控制装置
本发明涉及对控制对象进行控制的控制装置。
背景技术:
1、在控制以液压挖掘机为首的工程机械的控制装置中,要求进行自动运行等复杂的控制。在被要求进行这样复杂的控制的控制装置中,控制结构被层级化,直接控制控制对象的下游的控制环路按照来自上游的控制器的指示而工作。然而,当控制对象的输入输出特性大幅变动而下游的控制环路的输入输出特性大幅变动时,上游的控制器无法恰当地发挥作用而不能恰当地控制控制对象。因此,如果能够使下游的控制环路维持理想的输入输出特性,便能够基于下游的控制环路的理想输入输出特性来设计上游的控制器。
2、在此,提出了抑制下游的控制环路的输入输出特性变动的技术。例如,在非专利文献1中公开了一种控制装置,其具备:输入输出模型(pm),其表示从上游的控制器输入的控制输入(u′)和从控制对象输出的控制输出(y)的理想输入输出特性;补偿器(d),生成用于减轻对控制输入(u′)的输入输出模型(pm)的理想输出(ym)及控制输出(y)的模型误差的补偿输入(uc);减法器,从控制输入(u′)减去补偿输入(uc)来计算对控制对象的实际输入(u)。
3、然而,在非专利文献1的技术中,当控制对象的输入输出特性大幅变动时,利用补偿器则无法充分地补偿该变动,上游的控制器便无法恰当地控制控制对象。
4、现有技术文献
5、非专利文献
6、非专利文献1:梅井,冈岛,松永,浅井「对模型误差抑制补偿器的多输入输出系统的设计」,系统控制信息学会论文杂志,vol27 no.2,pp.67-72,2014
技术实现思路
1、本发明为解决上述的问题而作,其目的在于提供一种即使控制对象的输入输出特性大幅变动也能够利用设计时的控制器恰当地控制控制对象的控制装置。
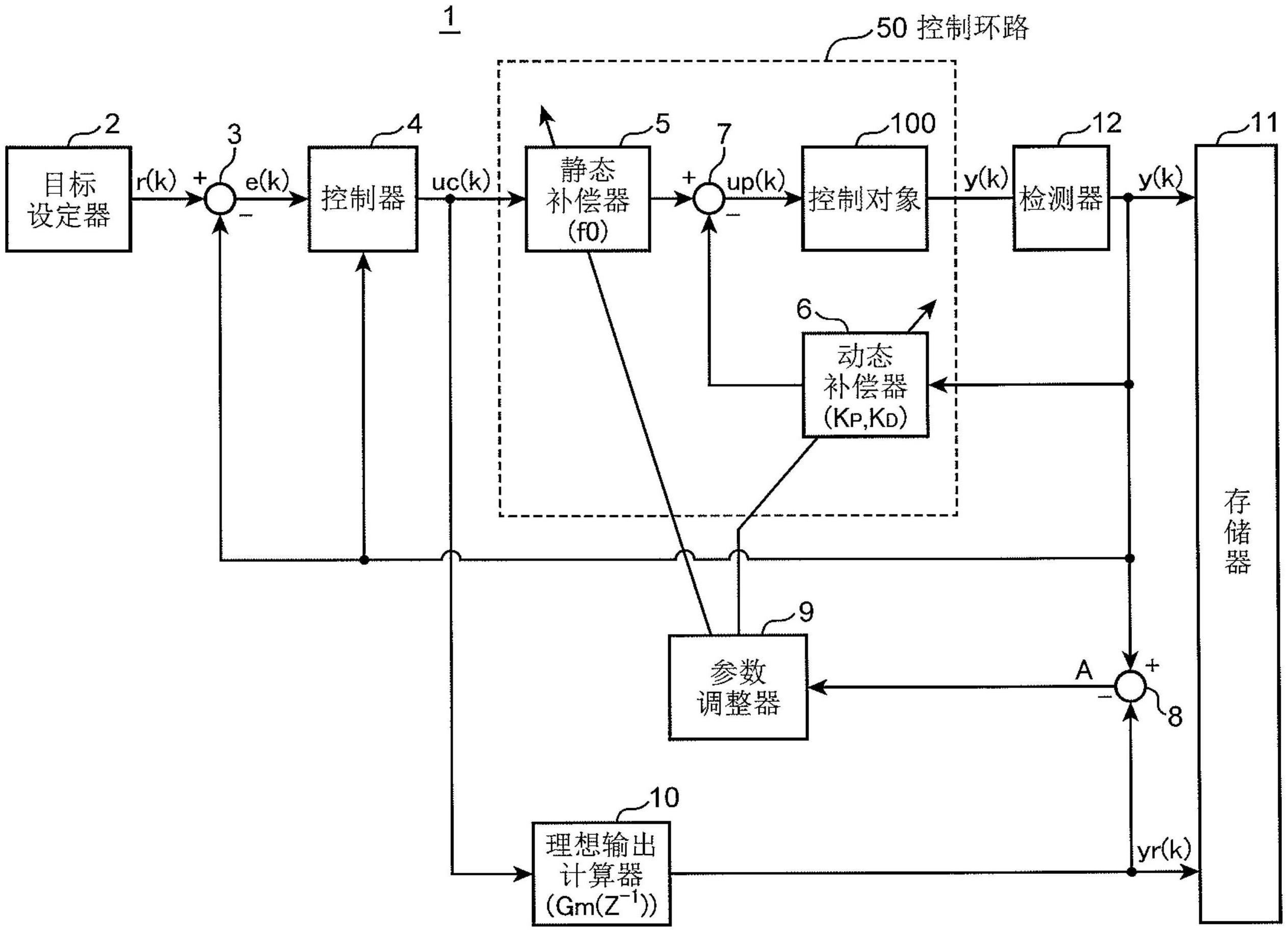
2、本发明的一个方面所涉及的控制装置对控制对象进行控制,其包括:控制器,计算用于使从所述控制对象输出的控制输出与目标输出的偏差成为零的控制输入;静态补偿器,根据静态参数和所述控制输入,计算补偿所述控制对象的静态特性的变动的静态补偿输入;动态补偿器,根据动态参数和所述控制输出,计算补偿所述控制对象的动态特性的变动的动态补偿输入;合成器,将所述静态补偿输入和所述动态补偿输入合成来计算实际输入并输入所述控制对象;理想输出计算器,利用规定所述控制输入与所述控制输出的理想输入输出关系的输入输出模型,计算与所述控制输入对应的理想输出;以及,参数调整器,以使所述控制输出与所述理想输出之差最小化的方式分别调整所述静态参数和所述动态参数。
3、根据该构成,即使控制对象的输入输出特性大幅变动也能够利用设计时的控制器恰当地控制控制对象。
技术特征:
1.一种控制装置,用于对控制对象进行控制,其特征在于包括:
2.根据权利要求1所述的控制装置,其特征在于:
3.根据权利要求1或2所述的控制装置,其特征在于:
4.根据权利要求1至3中任一项所述的控制装置,其特征在于:
5.根据权利要求1至4中任一项所述的控制装置,其特征在于:
技术总结
控制装置包括:静态补偿器,根据静态参数计算静态补偿输入;动态补偿器,根据动态参数计算动态补偿输入;减法器,将静态补偿输入和动态补偿输入合成来计算实际输入;理想输出计算器,利用规定控制输入与控制输出的理想输入输出关系的输入输出模型,计算与控制输入对应的理想输出;参数调整器,以使控制输出与理想输出之差最小化的方式调整静态参数和动态参数。
技术研发人员:胁谷伸,山本透
受保护的技术使用者:国立大学法人广岛大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!