马达控制系统、马达控制装置、马达控制方法以及程序与流程
本公开涉及一种在生产装置等中对马达进行控制的马达控制系统、马达控制装置、马达控制方法以及程序。
背景技术:
1、下面,对使用了以往的马达控制系统的生产装置进行说明。生产装置包括马达控制系统、马达以及移动部。马达控制系统包括控制器、马达控制装置以及摄像机。摄像机将进行拍摄得到的数据发送到控制器。生产装置例如是将电子部件等安装到印刷电路板的电子部件安装机。在该情况下,移动部包括安装头。此外,摄像机与移动部(安装头)一起进行移动。
2、控制器基于所接收到的数据来判定安装头的位置,基于判定出的位置来生成使马达移动时的目标位置,并将目标位置作为动作指令(位置指令)发送到马达控制装置。此时,控制器将上次输出的动作指令与由摄像机检测到的安装头的位置进行比较,来生成与其差相应的动作指令。马达控制装置基于动作指令来生成用于驱动马达的驱动信号。然后,马达根据驱动信号来使移动部移动。
3、此外,作为与本公开相关联的现有技术文献信息,例如已知有专利文献1。
4、现有技术文献
5、专利文献
6、专利文献1:日本特开平5-29795号公报
技术实现思路
1、然而,在以往的马达控制装置中,控制器基于由摄像机检测到的位置来生成马达的动作指令。因而,存在如下问题:例如在摄像机由于外力等而相对于预定的位置发生了偏差的情况下,移动部会向相对于正规的位置发生了偏差的位置移动。
2、因此,本公开是解决了该问题的发明,其目的在于提供一种能够探测移动部的相对于目标位置的偏差的马达控制系统、马达控制装置、马达控制方法以及程序。
3、本公开的马达控制系统包括控制器、马达控制装置以及位置检测装置。控制器具有第一信号处理电路。在第一信号处理电路中,针对从移动部位于初始位置起直到移动部到达目标位置为止的期间的移动计划设定了动作指令计划。另外,第一信号处理电路基于动作指令计划来将当前时间点的移动部的移动量作为动作指令进行输出。马达控制装置包括第二信号处理电路。第二信号处理电路基于动作指令来生成用于使移动部移动的驱动装置的驱动信号。位置检测装置检测移动部的位置,将所探测到的移动部的位置作为第一位置进行输出。在以上结构中,第二信号处理电路基于第一位置、目标位置以及基于动作指令计划中的未来的动作指令的移动部的未来的移动距离,来生成移动部的相对于目标位置的偏差量。并且,在偏差量为预先决定的阈值以上的情况下,第二信号处理电路输出通知信号。由此,能够达到期望的目的。
4、另外,本公开的马达控制装置具备第二信号处理电路,所述第二信号处理电路基于从控制器输出的动作指令来生成用于使移动部移动的驱动装置的驱动信号,所述控制器基于针对从移动部位于初始位置起直到移动部到达目标位置为止的期间的移动计划的动作指令计划来将当前时间点的移动部的移动量作为动作指令进行输出。第二信号处理电路基于目标位置、从位置检测装置输出的第一位置以及基于动作指令计划中的未来的动作指令的移动部的未来的移动距离来生成移动部的相对于目标位置的偏差量,该位置检测装置用于检测移动部的位置,并且将所探测到的移动部的位置作为第一位置进行输出,并且,在偏差量为预先决定的阈值以上的情况下,第二信号处理电路输出通知信号。由此,能够达到期望的目的。
5、另外,本公开的马达控制方法包括:基于针对从移动部位于初始位置起直到移动部到达目标位置为止的期间的移动计划的动作指令计划,来将当前时间点的移动部的移动量作为动作指令进行输出;基于动作指令来生成用于使移动部移动的驱动装置的驱动信号;以及检测移动部的位置,将所探测到的移动部的位置作为第一位置进行输出。而且,基于第一位置、目标位置以及基于动作指令计划中的未来的动作指令的移动部的未来的移动距离,来生成移动部的相对于目标位置的偏差量,在偏差量为预先决定的阈值以上的情况下,输出通知信号。由此,能够达到期望的目的。
6、另外,本公开的程序是用于使计算机执行上述的马达控制方法的程序。由此,能够达到期望的目的。
7、如上所述,根据本公开,能够通过基于位置检测装置中的检测信息的到目标的距离和基于未来的动作指令的移动部的移动距离,来生成使驱动装置按照动作指令计划进行了动作的情况下的移动部的相对于目标位置的偏差量。而且,基于所检测到的该偏差量来输出通知信号,因此使用马达控制系统等的作业员或者该系统等的管理员和维护人员能够容易地掌握移动部相对于目标位置发生了偏差。
技术特征:
1.一种马达控制系统,用于对具备移动部、驱动装置以及马达的装置进行控制,
2.根据权利要求1所述的马达控制系统,其中,
3.根据权利要求1所述的马达控制系统,其中,
4.根据权利要求1所述的马达控制系统,其中,
5.根据权利要求4所述的马达控制系统,其中,
6.根据权利要求1所述的马达控制系统,其中,
7.根据权利要求6所述的马达控制系统,其中,
8.根据权利要求1所述的马达控制系统,其中,
9.根据权利要求4或5所述的马达控制系统,其中,
10.根据权利要求1所述的马达控制系统,其中,
11.根据权利要求1至10中的任一项所述的马达控制系统,其中,
12.一种马达控制装置,用于从控制器接受指令来对具备移动部、驱动装置以及马达的装置进行控制,所述控制器基于针对从所述移动部位于初始位置起直到所述移动部到达目标位置为止的期间的移动计划设定的动作指令计划来将当前时间点的所述移动部的移动量作为动作指令进行输出,
13.一种马达控制方法,包括:
14.一种程序,用于使计算机执行根据权利要求13所述的马达控制方法。
技术总结
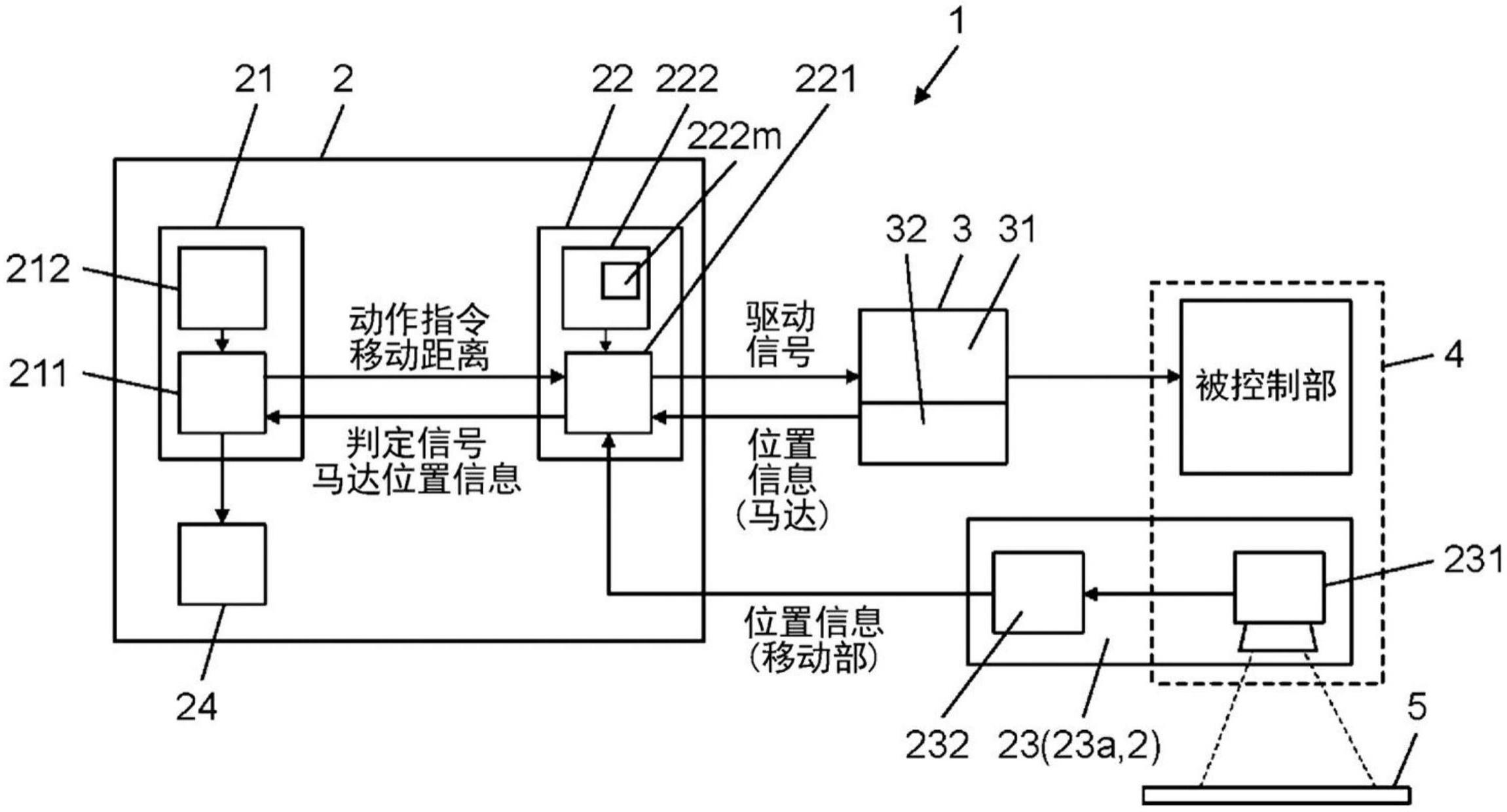
提供一种能够容易地探测相对于目标位置的偏差的马达控制系统。马达控制系统(2)包括控制器(21)、马达控制装置(22)以及位置检测装置(23)。在控制器(21)中设定有针对从移动部(4)位于初始位置起直到移动部(4)到达目标位置为止的期间的移动计划的动作指令计划。控制器(21)基于动作指令计划来将当前时间点的移动部的移动量作为动作指令进行输出。马达控制装置(22)基于动作指令来生成驱动装置(3)的驱动信号。位置检测装置(23)检测移动部(4)的位置,并输出第一位置。马达控制装置(22)基于第一位置、目标位置以及基于未来的动作指令的移动部(4)的未来的移动距离,来生成移动部(4)的相对于目标位置的偏差量。在偏差量为阈值以上的情况下,马达控制装置(22)输出通知信号。
技术研发人员:久保井悠辅,藤原弘,村上健太
受保护的技术使用者:松下知识产权经营株式会社
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!