控制装置以及搬送系统的制作方法
本公开涉及一种对搬送机器人进行控制的控制装置以及包括此控制装置的搬送系统。
背景技术:
1、提出有在工厂或仓库等中利用的无人搬送车(automated guided vehicle,agv)或无人叉车(automated guided forklift,agf)等自行式的搬送机器人。多台此种搬送机器人通过无线通信由控制装置予以控制,构成实现工厂等中的搬送的自动化的搬送系统。
2、现有技术文献
3、专利文献
4、专利文献1:日本公开专利公报特开2013-225253号公报
技术实现思路
1、发明所要解决的问题
2、但是,如上所述的以往的搬送系统中,未曾考虑过可能对搬送机器人所搬送的搬送对象物造成影响的、工厂或仓库等中的区域的环境。因此,以往技术中有可能发生下述问题,即,在搬送机器人的搬送过程中,无法对搬送对象物抑制环境的影响。
3、本公开是有鉴于所述问题而完成,目的在于提供一种能够抑制环境对搬送机器人的搬送对象物的影响的控制装置以及搬送系统。
4、解决问题的技术手段
5、为了解决所述问题,本公开采用以下的结构。
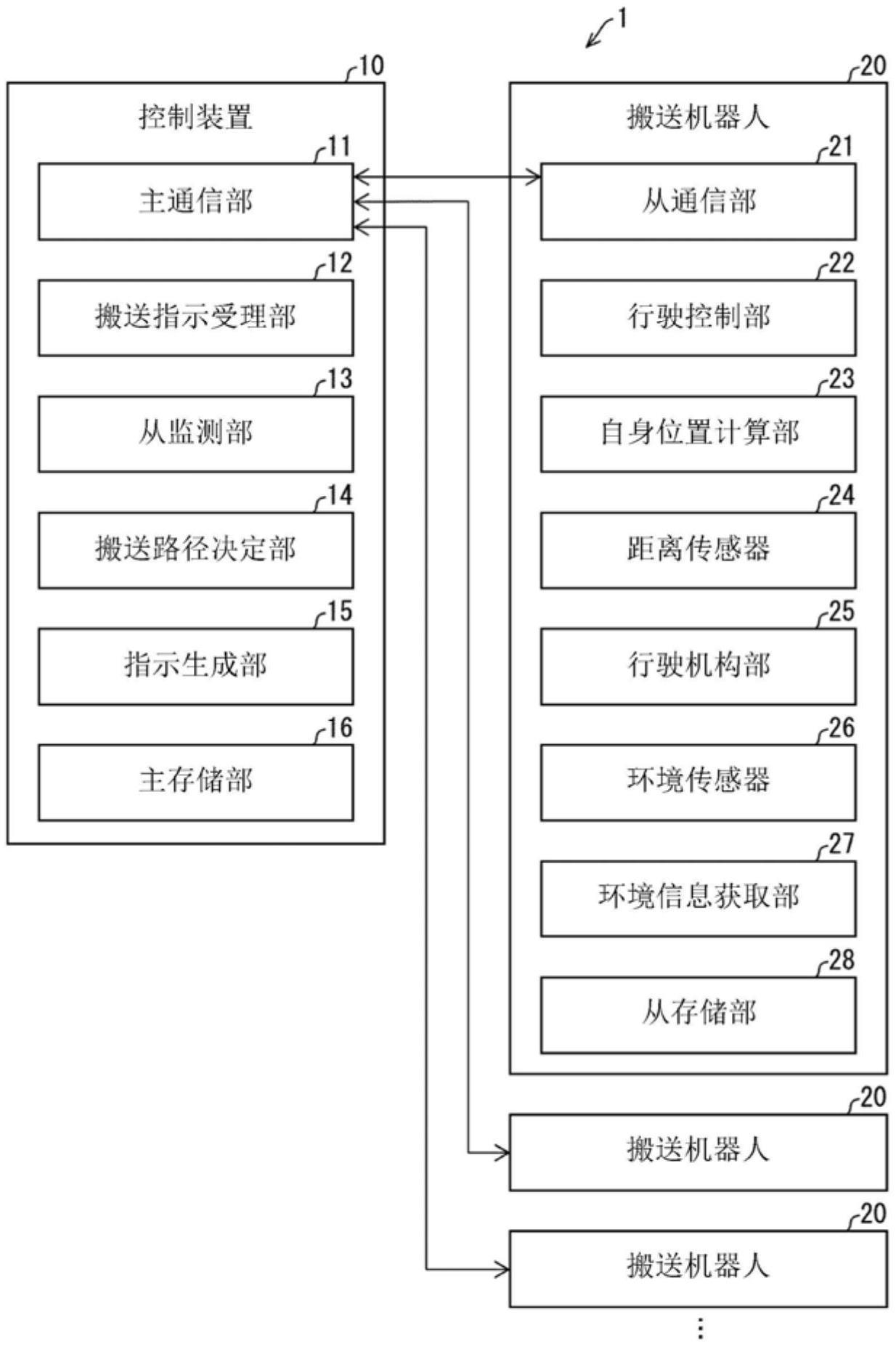
6、本公开的一方面的控制装置包括下述结构,即,一种控制装置,进行在规定的区域内行驶而对搬送对象物进行搬送的、搬送机器人的控制,所述控制装置包括:主通信部,与所述搬送机器人之间进行通信;存储部,存储地图数据,所述地图数据包含所述区域内的、与障碍物相关的障碍物信息以及与可能对所述搬送对象物造成影响的环境参数相关的环境参数信息;搬送指示受理部,受理搬送指示,所述搬送指示与所述搬送对象物的搬送相关且包含表示所述搬送对象物的搬送对象物信息、表示搬送源的搬送源信息以及表示搬送目的地的搬送目的地信息;搬送路径决定部,基于所述搬送指示与所述地图数据,决定所述搬送机器人对所述搬送对象物的从所述搬送源直至所述搬送目的地为止的搬送路径;以及指示生成部,通过所述主通信部对所述搬送机器人给予搬送的指示,以使所述搬送机器人按照所述搬送路径决定部所决定的所述搬送路径搬送所述搬送对象物,所述搬送路径决定部根据所述搬送指示中所含的所述搬送对象物信息所表示的所述搬送对象物,考虑对所述搬送对象物造成影响的所述环境参数来决定所述搬送路径。
7、而且,本公开的一方面的搬送系统包括:搬送机器人,设有行驶机构部、距离传感器、自身位置计算部、行驶控制部以及从通信部,所述距离传感器获取表示朝向存在于监测区域内的物体的距离的距离信息,所述自身位置计算部算出自身位置信息,所述行驶控制部使用来自所述距离传感器的距离信息以及来自所述自身位置计算部的自身位置信息来控制所述行驶机构部,所述从通信部进行所述通信;以及所述控制装置。
8、发明的效果
9、通过本公开,可提供一种能够抑制环境对搬送机器人的搬送对象物的影响的控制装置以及搬送系统。
技术特征:
1.一种控制装置,进行在规定的区域内行驶而对搬送对象物进行搬送的、搬送机器人的控制,所述控制装置包括:
2.根据权利要求1所述的控制装置,其中
3.根据权利要求1或2所述的控制装置,其中
4.根据权利要求1至3中任一项所述的控制装置,其中
5.根据权利要求1至4中任一项所述的控制装置,其中
6.一种搬送系统,包括:
7.根据权利要求6所述的搬送系统,其中
技术总结
本发明实现一种能够抑制环境对搬送机器人的搬送对象物的影响的控制装置以及搬送系统。控制装置(10)包括:主存储部(16),存储地图数据,所述地图数据包含障碍物信息、以及与可能对搬送对象物造成影响的环境参数相关的环境参数信息;以及搬送路径决定部(14),基于搬送指示与地图数据,根据所述搬送指示中所含的搬送对象物信息所表示的搬送对象物,考虑可能对所述搬送对象物造成影响的环境参数来决定搬送路径。
技术研发人员:大城笃志
受保护的技术使用者:欧姆龙株式会社
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!