自移动设备、及其控制方法与流程
本发明涉及园艺设备,尤其涉及一种自移动设备、及其控制方法。
背景技术:
1、现有的自移动的园艺设备(也可以称为自助园艺设备或者智能园艺设备或者自动园艺设备等),如自动割草机,可以在无人照看或者控制的情况下进行自动割草,从而减少对使用者时间的占用,也可以减少使用者的重复劳动。
2、为了实现自移动设备的自动工作,需要人为对其工作区域进行限定。例如,一种方法是:对工作区域的边缘以及工作区域内的障碍物边缘埋线,以供自移动设备能够识别出工作区域的边缘和障碍物的边缘,从而防止自移动设备行驶出限定的工作区域以及碰撞工作区域中的障碍物。这种方式存在的问题在于需要专业工作人员进行埋线,需要耗费大量的时间和成本。
3、此外,在自移动设备回到充电桩的过程中,其要沿着工作区域的边缘线或者额外铺设的充电桩引导线上桩。上述方式需要用户对工作区域进行一定改造,而且当充电桩发生移动时,需要相应地移动埋线,费时费力。
技术实现思路
1、鉴于上述问题,提出了本发明实施例,其提供一种自移动设备、及其控制方法,以至少解决现有的自移动设备上桩困难的问题。
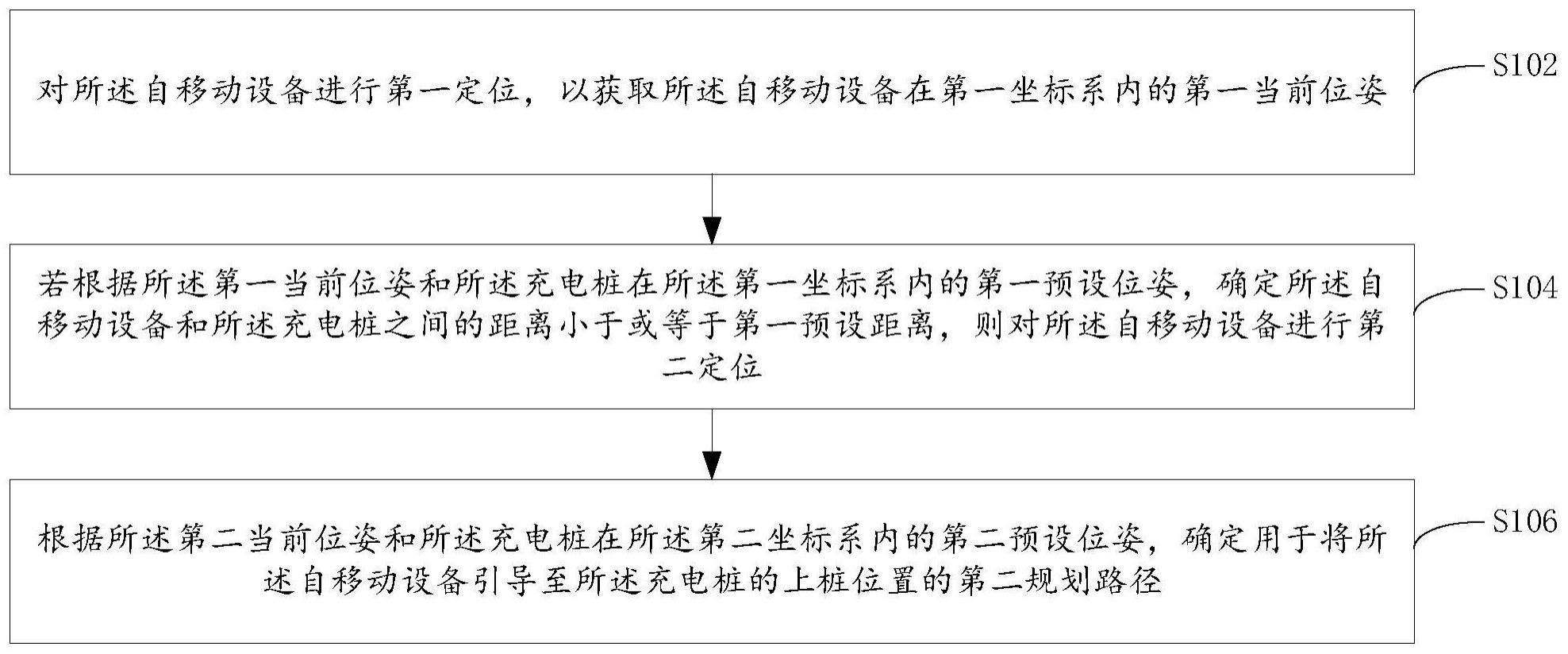
2、本发明的一个或者多个实施例提供一种自移动设备的控制方法,包括:对所述自移动设备进行第一定位,以获取所述自移动设备在第一坐标系内的第一当前位姿;若根据所述第一当前位姿和所述充电桩在所述第一坐标系内的第一预设位姿,确定所述自移动设备和所述充电桩之间的距离小于或等于第一预设距离,则对所述自移动设备进行第二定位,以获得所述自移动设备在第二坐标系内的第二当前位姿,所述第二定位包括通过所述自移动设备检测充电桩上的标识进行定位,所述第二定位的定位精度大于所述第一定位的定位精度;根据所述第二当前位姿和所述充电桩在所述第二坐标系内的第二预设位姿,确定用于将所述自移动设备引导至所述充电桩的上桩位置的第二规划路径。
3、根据本申请的另一方面,提供一种自移动设备的控制方法包括:获取充电桩的第二充电桩位姿和所述自移动设备的第二当前位姿,第二充电桩位姿通过所述自移动设备检测充电桩上的标识的位姿信息获得,所述第二当前位姿为基准位姿,所述标识包括特征元素阵列,所述标识的位姿信息包括特征元素之间的间距和角度;根据所述第二充电桩位姿和所述第二当前位姿,将所述自移动设备引导到所述充电桩的上桩位置。
4、根据本发明的另一方面,提供一种自移动设备,其包括控制器,所述控制器用于执行上述的自移动设备的控制方法。
5、根据本申请的另一方面,提供一种割草机,其特征在于,包括控制器,所述控制器用于执行上述的方法。
6、根据本申请的另一方面,提供一种自移动设备的控制装置,包括:获取模块,用于对所述自移动设备进行第一定位,以获取所述自移动设备在第一坐标系内的第一当前位姿;第一确定模块,用于若根据所述第一当前位姿和所述充电桩在所述第一坐标系内的第一预设位姿,确定所述自移动设备和所述充电桩之间的距离小于或等于第一预设距离,则对所述自移动设备进行第二定位,以获得所述自移动设备在第二坐标系内的第二当前位姿,所述第二定位包括通过所述自移动设备检测充电桩上的标识进行定位;第二确定模块,用于根据所述第二当前位姿和所述充电桩在所述第二坐标系内的第二预设位姿,确定用于将所述自移动设备引导至所述充电桩的上桩位置的第二规划路径。
7、根据本申请的另一方面,提供一种计算机存储介质,其中,所述计算机存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述的方法。
8、通过该方法可以控制自移动设备沿着第二规划路径移动,从而快速到达充电桩。这样自移动设备的控制方法,针对自移动设备与充电桩之间的不同距离采用具有不同精度和计算负载的定位方式,即保证了定位和导航的准确性,又提升了定位和导航的效率,且在距离较大时采用计算负载较低的定位方式,降低了数据处理成本还有助于节省电量,从而增加自移动设备的续航能力。此外,在导航过程中采用的定位方式均不需要埋线,因此减少了对工作区域改造的成本,也就降低了自移动设备的使用成本,而且充电桩移动时也十分方便,不需要更改埋线,提升了使用的便捷性。
技术特征:
1.一种自移动设备的控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述自移动设备上配置有图像采集器,所述对所述自移动设备进行第二定位,以获得所述自移动设备在第二坐标系内的第二当前位姿,包括:
3.根据权利要求1所述的方法,其特征在于,所述第二坐标系以所述充电桩的位姿作为坐标原点;或者,所述第二坐标系以所述自移动设备的位姿作为坐标原点。
4.根据权利要求2或3所述的方法,其特征在于,所述对所述自移动设备进行第二定位,以获得所述自移动设备在第二坐标系内的第二当前位姿,还包括:
5.根据权利要求2或3所述的方法,其特征在于,所述标识包括由特征元素构成的元素阵列,所述特征元素包括下述至少之一:特征点、特征线、和特征图案,所述标识的位姿信息至少包括识别出的所述标识中特征元素的类别和特征元素的位姿。
6.根据权利要求5所述的方法,其特征在于,所述特征元素的位姿包括特征元素之间的间距和角度。
7.根据权利要求5所述的方法,其特征在于,所述标识的真实位姿包括所述标识中相邻两个同一类特征元素在所述第二坐标系内的空间距离;
8.根据权利要求2或3所述的方法,其特征在于,所述对所述自移动设备进行第二定位,以获得所述自移动设备在第二坐标系内的第二当前位姿,还包括:
9.根据权利要求1所述的方法,其特征在于,所述根据所述第二当前位姿和所述充电桩在所述第二坐标系内的第二预设位姿,确定用于将所述自移动设备引导至所述充电桩的上桩位置的第二规划路径,包括:
10.根据权利要求9所述的方法,其特征在于,所述方法还包括:
11.根据权利要求1所述的方法,其特征在于,所述对所述自移动设备进行第一定位,以获取所述自移动设备在第一坐标系内的第一当前位姿,包括:
12.根据权利要求11所述的方法,其特征在于,所述基于已建图区域对应的视觉建图数据,对所述自移动设备进行第一定位,以获得所述自移动设备在所述第一坐标系内的第一当前位姿,包括:
13.根据权利要求11所述的方法,其特征在于,所述对所述自移动设备进行第一定位,以获取所述自移动设备在第一坐标系内的第一当前位姿,还包括:
14.根据权利要求1所述的方法,其特征在于,所述方法还包括:
15.根据权利要求14所述的方法,其特征在于,所述方法还包括:
16.根据权利要求1所述的方法,其特征在于,所述第二定位的定位精度大于所述第一定位的定位精度。
17.一种自移动设备的控制方法,其特征在于,包括:
18.一种自移动设备,其特征在于,包括控制器,所述控制器用于执行权利要求1-17中任一项所述的自移动设备的控制方法。
19.一种割草机,其特征在于,包括控制器,所述控制器用于执行权利要求1-17中任一项所述的自移动设备的控制方法。
20.一种自移动设备的控制装置,其特征在于,包括:
21.一种计算机存储介质,其中,所述计算机存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1-17中任一项所述的自移动设备的控制方法。
技术总结
本发明实施例提供一种自移动设备、及其控制方法。该自移动设备的控制方法包括:对自移动设备进行第一定位,以获取自移动设备在第一坐标系内的第一当前位姿;若根据第一当前位姿和充电桩在第一坐标系内的第一预设位姿,确定自移动设备和充电桩之间的距离小于或等于第一预设距离,则对自移动设备进行第二定位,以获得自移动设备在第二坐标系内的第二当前位姿,第二定位包括通过所述自移动设备检测充电桩上的标识进行定位;根据第二当前位姿和充电桩在第二坐标系内的第二预设位姿,确定用于将自移动设备引导至充电桩的上桩位置的第二规划路径,以控制自移动设备沿第二规划路径移动。
技术研发人员:请求不公布姓名
受保护的技术使用者:未岚大陆(北京)科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!