一种机器人的沿边控制方法、芯片及机器人与流程
本发明涉及机器人沿边行走的,尤其涉及一种机器人的沿边控制方法、芯片及机器人。
背景技术:
1、清洁机器人有一种模式是全局沿边模式,即清洁机器人沿着整个地形的边缘线行走,机器人的前进方向被调整为平行于整个地形的边缘线。清洁机器人在室内工作间区域进行全局沿边行走(比如,沿着墙体的轮廓线行走,清洁机器人的前进方向与墙体的轮廓线平行)的过程中,由于动态障碍物的阻碍作用,所以清洁机器人会检测到在室内工作区域的一个局部区域(比如4米乘4米的房间单位区域)内重复返回到同一个位置,即机器人出现路径回环的现象,比如,机器人在当前位置记录的旋转角度与沿边行走的起点处记录的旋转角度的差值是360度的正整数倍,此时,清洁机器人继续在同一个局部区域内沿边行走,没有进入规划清扫状态。或者,机器人检测到在局部区域内出现路径回环时,清洁机器人误判为已完成整个室内工作区域内的全局沿边行走,并停止沿边行走而进入规划清扫状态。综上,导致清洁机器人工作效率降低。
技术实现思路
1、针对上述技术缺陷,本发明公开一种机器人的沿边控制方法、芯片及机器人,该沿边控制方法在确定沿完全局工作区域(室内工作区域)并返回有效沿边起点时控制机器人停止沿边行走、或在机器人打转或沿边被困于全局工作区域内的一个局部区域时,可以导航至新的有效沿边起点位置处继续执行沿边行走,以克服机器人工作效率低的问题。具体技术方案如下:
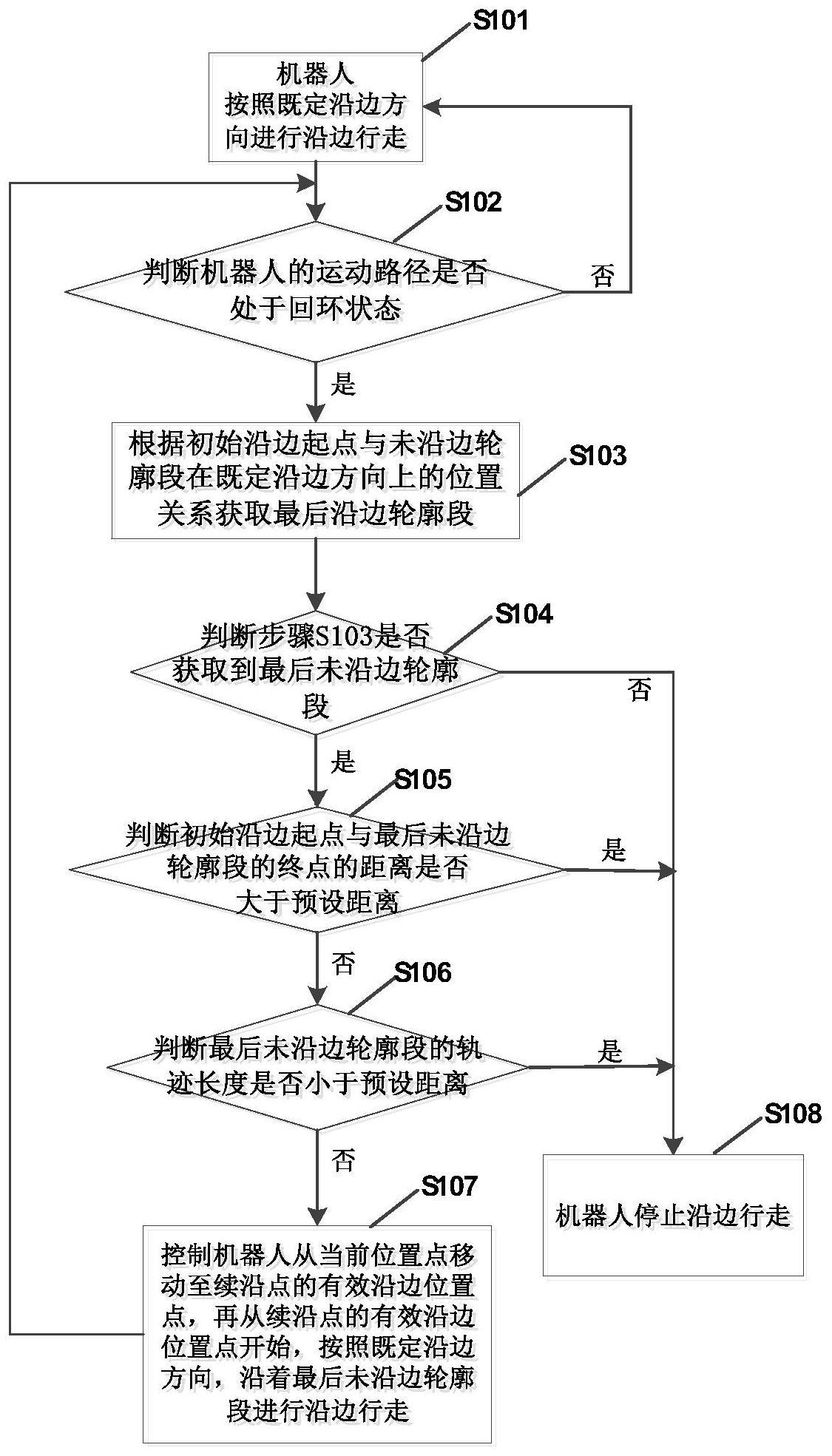
2、一种机器人的沿边控制方法,该沿边控制方法包括步骤s1、根据初始沿边起点与未沿边轮廓段在既定沿边方向上的位置关系获取最后未沿边轮廓段;步骤s2、根据初始沿边起点与最后未沿边轮廓段的位置关系、以及最后未沿边轮廓段的轨迹长度来调整机器人沿边行走的方式;其中,最后未沿边轮廓段是属于未沿边轮廓段;其中,初始沿边起点是机器人开始执行沿边行走时所沿的轮廓线中的位置点。
3、进一步地,所述根据初始沿边起点与未沿边轮廓段在既定沿边方向上的位置关系获取最后未沿边轮廓段的方法包括从初始沿边起点开始,按照既定沿边方向依次遍历未沿边轮廓段,且按照既定沿边方向不重复地遍历未沿边轮廓段;当遍历到最后一条未沿边轮廓段时,将最后一条未沿边轮廓段设置为最后未沿边轮廓段。
4、进一步地,所述沿边控制方法还包括:当检测到机器人沿边行走多圈、或机器人绕着一个中心位置点转动多圈时,确定机器人的运动路径处于回环状态,并控制机器人执行步骤s1。
5、进一步地,所述步骤s2的具体方法包括当检测到初始沿边起点与最后未沿边轮廓段的终点的距离大于预设距离时,控制机器人停止沿边行走;当检测到最后未沿边轮廓段的轨迹长度小于预设距离时,控制机器人停止沿边行走;其中,预设距离是与机器人的机身尺寸相关联。
6、进一步地,所述步骤s2的具体方法还包括检测到初始沿边起点与最后未沿边轮廓段的终点的距离小于或等于预设距离,且检测到最后未沿边轮廓段的轨迹长度大于或等于预设距离时,控制机器人从当前位置点移动至续沿点的有效沿边位置点处,再从续沿点的有效沿边位置点开始,按照所述既定沿边方向,沿着最后未沿边轮廓段进行沿边行走。
7、进一步地,当步骤s1获取不到所述最后未沿边轮廓段时,确定不存在所述未沿边轮廓段,并控制机器人停止沿边行走;当步骤s1获取到所述最后未沿边轮廓段时,开始执行步骤s2。
8、进一步地,所述续沿点是按照所述既定沿边方向,在所述最后未沿边轮廓段上遍历到的第一个端点,使得所述续沿点的有效沿边位置点被配置为机器人沿着最后未沿边轮廓段开始沿边行走的位置点;所述最后未沿边轮廓段的终点是按照所述既定沿边方向,在所述最后未沿边轮廓段上遍历到的最后一个端点;其中,所述初始沿边起点与所述最后未沿边轮廓段的终点之间连接有已沿边轮廓段,或者所述初始沿边起点与所述最后未沿边轮廓段的终点重合;其中,已沿边轮廓段是机器人按照所述既定沿边方向进行沿边行走的过程中,所沿过的轮廓线;机器人的行走过的位置是已沿边轮廓段中的相应位置点的有效沿边位置处。
9、进一步地,所述最后未沿边轮廓段是从初始沿边起点开始,沿着与所述既定沿边方向相反的方向延伸的未沿边轮廓段;已沿边轮廓段是机器人从所述初始沿边起点的有效沿边位置点开始,按照所述既定沿边方向沿边行走时所沿过的轮廓线,并被标记在机器人构建的地图中;其中,可沿边轮廓线包括已沿边轮廓段和未沿边轮廓段;所述初始沿边起点是位于所述可沿边轮廓线中。
10、进一步地,可沿边轮廓线是在机器人构建的地图中,由未知区域的轮廓线与障碍物的轮廓线相连接形成的闭合线,在闭合线的内部形成封闭区域,使得机器人在该封闭区域内沿着可沿边轮廓线进行沿边行走;其中,可沿边轮廓线中的每个点的有效沿边位置点都是该封闭区域内,与可沿边轮廓线中的对应点存在预设间距的位置点,且是允许机器人通行的位置点;其中,机器人的当前位置点与可沿边轮廓线中相应点的有效沿边位置点的距离小于或等于预设间距时,可沿边轮廓线中相应点被标记为已沿边轮廓段中的点;其中,未沿边轮廓段是所述可沿边轮廓线中,除了已沿边轮廓段之外的轮廓线;使得已沿边轮廓段和未沿边轮廓段连接成所述可沿边轮廓线。
11、进一步地,所述预设间距是大于或等于机器人的机身半径;其中,机器人在沿着可沿边轮廓线行走时,机器人当前的前进方向平行于当前所沿的可沿边轮廓线,以形成沿边行走的姿态。
12、进一步地,所述既定沿边方向是顺时针方向或逆时针方向;其中,所述既定沿边方向是顺时针方向时,所述既定沿边方向被配置为机器人沿边行走的左沿边方向,使得机器人所沿的障碍物的轮廓中的位置点位于机器人的前进方向的左侧,其中,所述初始沿边起点位于机器人的前进方向的左侧;其中,所述既定沿边方向是逆时针方向时,所述既定沿边方向被配置为机器人沿边行走的右沿边方向,使得机器人所沿的障碍物的轮廓中的位置点位于机器人的前进方向的右侧,其中,所述初始沿边起点位于机器人的前进方向的右侧。
13、一种芯片,内置控制程序,所述控制程序用于控制机器人执行所述沿边控制方法。
14、一种机器人,该机器人安装有视觉传感器或激光传感器,该机器人内置有所述芯片,用于控制机器人执行所述沿边控制方法。
15、本发明的有益技术效果在于,本发明在区分已沿边轮廓段和未沿边轮廓段的基础上,结合初始沿边起点和既定沿边方向获取最后未沿边轮廓段,进而根据初始沿边起点与最后未沿边轮廓段的端点的距离位置关系去改变机器人沿边行走的方式,使得机器人在确定沿回初始沿边起点的有效沿边位置点时或剩余的最后未沿边轮廓段的轨迹长度较小时或不存在未沿边轮廓段时,停止沿边行走,从而让机器人及时进入规划清扫状态,避免机器人沿全局区域多圈行走;也使得机器人在确定没有沿回初始沿边起点的有效沿边位置点且剩余的最后未沿边轮廓段的轨迹长度较长时,将最后未沿边轮廓段在既定沿边方向上起点设置为续沿点,再控制机器人从续沿点的有效沿边位置点开始继续作沿边行走,避免机器人被困于全局工作区域内的一个局部区域内。提高机器人的工作效率。
技术特征:
1.一种机器人的沿边控制方法,其特征在于,该沿边控制方法包括:
2.根据权利要求1所述沿边控制方法,其特征在于,所述根据初始沿边起点与未沿边轮廓段在既定沿边方向上的位置关系获取最后未沿边轮廓段的方法包括:
3.根据权利要求1所述沿边控制方法,其特征在于,所述沿边控制方法还包括:当检测到机器人沿边行走多圈、或机器人绕着一个中心位置点转动多圈时,确定机器人的运动路径处于回环状态,并控制机器人执行步骤s1。
4.根据权利要求1所述沿边控制方法,其特征在于,所述步骤s2的具体方法包括:
5.根据权利要求1所述沿边控制方法,其特征在于,所述步骤s2的具体方法还包括:
6.根据权利要求4或5所述沿边控制方法,其特征在于,当步骤s1获取不到所述最后未沿边轮廓段时,确定不存在所述未沿边轮廓段,并控制机器人停止沿边行走;
7.根据权利要求5所述沿边控制方法,其特征在于,所述续沿点是按照所述既定沿边方向,在所述最后未沿边轮廓段上遍历到的第一个端点,使得所述续沿点的有效沿边位置点被配置为机器人沿着最后未沿边轮廓段开始沿边行走的位置点;
8.根据权利要求2至5任一项所述沿边控制方法,其特征在于,所述最后未沿边轮廓段是从初始沿边起点开始,沿着与所述既定沿边方向相反的方向延伸的未沿边轮廓段;
9.根据权利要求8所述沿边控制方法,其特征在于,可沿边轮廓线是在机器人构建的地图中,由未知区域的轮廓线与障碍物的轮廓线相连接形成的闭合线,在闭合线的内部形成封闭区域,使得机器人在该封闭区域内沿着可沿边轮廓线进行沿边行走;
10.根据权利要求9所述沿边控制方法,其特征在于,所述预设间距是大于或等于机器人的机身半径;其中,机器人在沿着可沿边轮廓线行走时,机器人当前的前进方向平行于当前所沿的可沿边轮廓线,以形成沿边行走的姿态。
11.根据权利要求8所述沿边控制方法,其特征在于,所述既定沿边方向是顺时针方向或逆时针方向;
12.一种芯片,内置控制程序,其特征在于,所述控制程序用于控制机器人执行权利要求1至11中任一项所述沿边控制方法。
13.一种机器人,该机器人安装有视觉传感器或激光传感器,其特征在于,该机器人内置有权利要求12所述芯片,用于控制机器人执行权利要求1至11中任一项所述沿边控制方法。
技术总结
本发明公开一种机器人的沿边控制方法、芯片及机器人,该沿边控制方法包括步骤S1、根据初始沿边起点与未沿边轮廓段在既定沿边方向上的位置关系获取最后未沿边轮廓段;步骤S2、根据初始沿边起点与最后未沿边轮廓段的位置关系、以及最后未沿边轮廓段的轨迹长度来调整机器人沿边行走的方式;其中,最后未沿边轮廓段是属于未沿边轮廓段;其中,初始沿边起点是机器人开始执行沿边行走时所沿的轮廓线中的位置点。从而提高机器人的工作效率。
技术研发人员:黄惠保,陈卓标,周和文,孙明,徐松舟
受保护的技术使用者:珠海一微半导体股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!