用于运载工具的方法、运载工具和存储介质与流程
本发明涉及用于运载工具的方法、运载工具和存储介质。
背景技术:
1、自主运载工具可在具有诸如行人或运载工具等的一个或多于一个其他智能体的环境中操作。智能体可能突然出现在自主运载工具的视野中。智能体的突然出现会导致自主运载工具急剧地进行机动动作以避免与智能体碰撞。急剧的机动动作可能是危险的或者可能会打扰自主运载工具中的乘员。
技术实现思路
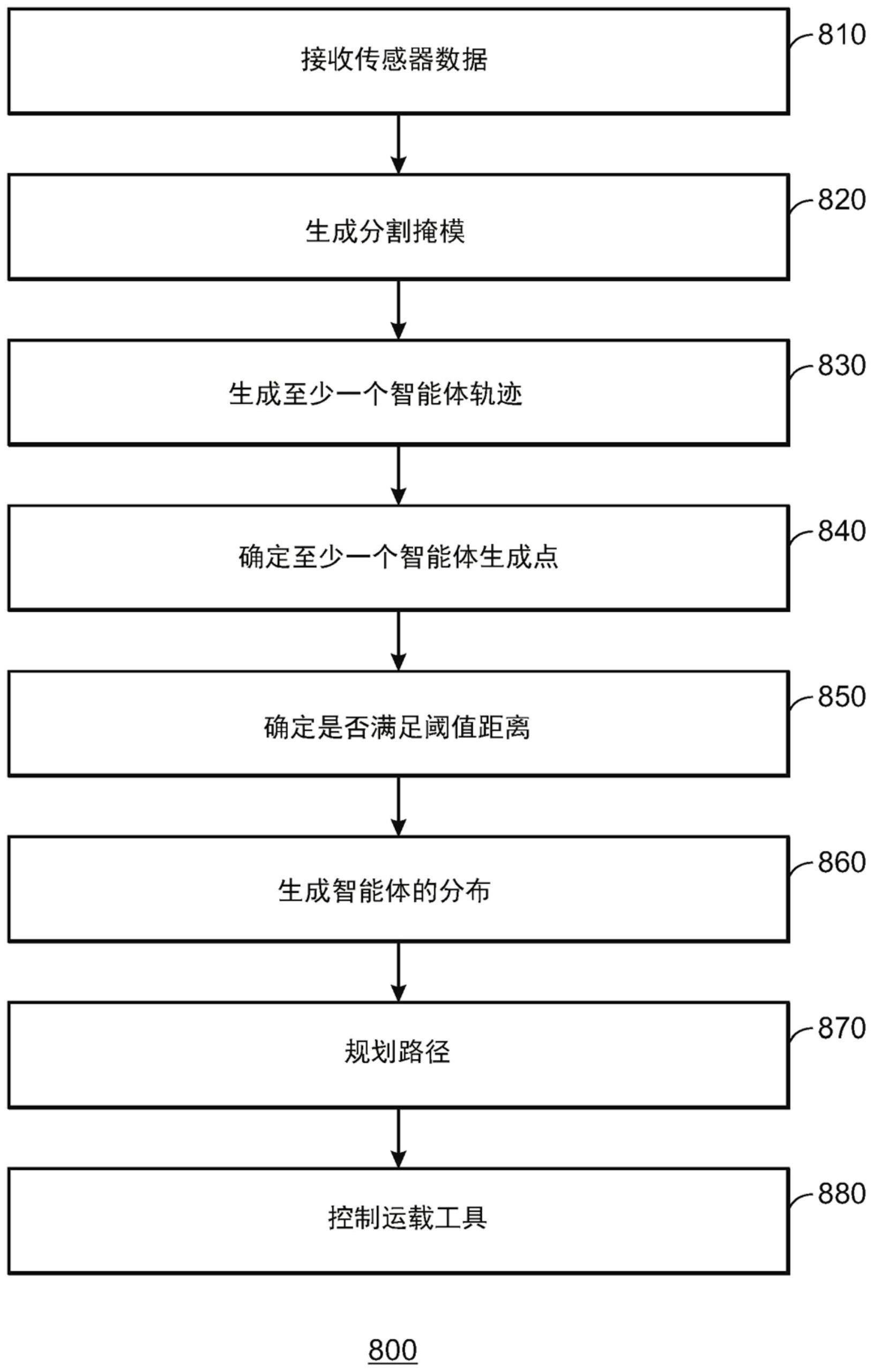
1、一种用于运载工具的方法,包括:使用至少一个处理器,接收指示所述运载工具周围的环境的传感器数据;使用所述至少一个处理器,生成指示至少一个被遮挡区域的分割掩模;使用所述至少一个处理器,基于所述至少一个被遮挡区域来生成至少一个假定智能体轨迹;使用所述至少一个处理器,基于至少一个智能体轨迹来确定至少一个智能体生成点;使用所述至少一个处理器,确定是否满足从所述至少一个智能体生成点到所述运载工具的阈值距离;使用所述至少一个处理器,基于确定为满足预定义的阈值距离,基于所述至少一个智能体生成点来生成与至少一个运动轮廓相关联的至少一个智能体;使用所述至少一个处理器,基于生成所述至少一个智能体来规划所述运载工具的路径;以及使用所述至少一个处理器,根据所规划的路径来控制所述运载工具。
2、一种运载工具,包括:至少一个处理器;以及至少一个非暂时性存储介质,其存储有指令,所述指令在由所述至少一个处理器执行时使所述至少一个处理器进行上述的方法。
3、至少一个非暂时性计算机可读存储介质,其存储有指令,所述指令在由至少一个处理器执行时使所述至少一个处理器进行上述的方法。
技术特征:
1.一种用于运载工具的方法,包括:
2.根据权利要求1所述的方法,还包括:
3.根据权利要求1或2所述的方法,还包括:
4.根据权利要求1至3中任一项所述的方法,还包括:
5.根据权利要求4所述的方法,还包括:
6.根据权利要求1至5中任一项所述的方法,其中,基于所述运载工具上所安装的传感器的感测范围来计算所述阈值距离。
7.根据权利要求1至6中任一项所述的方法,其中,所述至少一个智能体轨迹是开放遮挡轨迹。
8.根据权利要求1至7中任一项所述的方法,其中,基于所述运载工具的初始轨迹来生成所述至少一个智能体轨迹。
9.根据权利要求8所述的方法,其中,所述至少一个智能体轨迹与所述运载工具的初始轨迹垂直。
10.根据权利要求1至7中任一项所述的方法,其中,基于行驶车道的中心来生成所述至少一个智能体轨迹。
11.根据权利要求10所述的方法,其中,所述至少一个智能体轨迹沿着行驶车道的中心。
12.一种运载工具,包括:
13.至少一个非暂时性计算机可读存储介质,其存储有指令,所述指令在由至少一个处理器执行时使所述至少一个处理器进行根据权利要求1至11任一项所述的方法。
技术总结
本发明提供用于运载工具的方法、运载工具和存储介质。提供了用于预测假定智能体的运动的方法,该方法可以包括:接收传感器数据;生成指示至少一个被遮挡区域的分割掩模;生成至少一个假定智能体轨迹;确定至少一个智能体生成点;确定是否满足从至少一个智能体生成点到运载工具的阈值距离;生成至少一个智能体;规划运载工具的路径;以及根据所规划的路径来控制运载工具。还提供了系统和计算机程序产品。
技术研发人员:Y·潘,黄佑丰,S·D·彭德尔顿,符国铭
受保护的技术使用者:动态AD有限责任公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!