一种扫地机器人沿墙探索的控制方法与流程
本发明涉及智能机器人,特别涉及一种扫地机器人沿墙探索的控制方法。
背景技术:
1、随着科学技术的发展,智能机器人日益得到广泛的应用。特别是家庭服务类也日益普及,例如扫地机器人。目前已有的扫地机器人通常采用的沿墙探索的方法来构建地图,这就需要在扫地机器人外壳顺时针90度方向上安装沿墙红外测距传感器,如果在没有沿墙红外测距传感器的情形下,则机器人不能很好地贴近墙壁,所以扫地机器人无法完全将墙角处的灰尘清扫干净。
2、此外,现有技术的常用术语包括:
3、1、机器人自主探索:是用机器人对未知环境进行快速构建地图的过程。
4、2、机器人沿墙探索:是指机器人采用沿着未知环境中的墙壁进行自主探索构建地图的过程。
技术实现思路
1、为了解决上述现有技术中的问题,本申请的目的在于:没有安装专门的沿墙红外测距传感器时,依然能够只利用红外单线激光雷达和碰撞传感器,使得扫地机器人能够沿着墙壁去探索未知区域,同时通过碰撞传感器能够帮助机器人对动态障碍物及干扰有更良好的适应性,本申请的方法能够使没有专门沿墙测距传感器的情况下,令扫地机器人沿墙工作时更加贴近墙面,提高扫地机器人的清扫覆盖率。
2、具体地,本发明提供一种扫地机器人沿墙探索的控制方法,所述方法包括以下步骤:
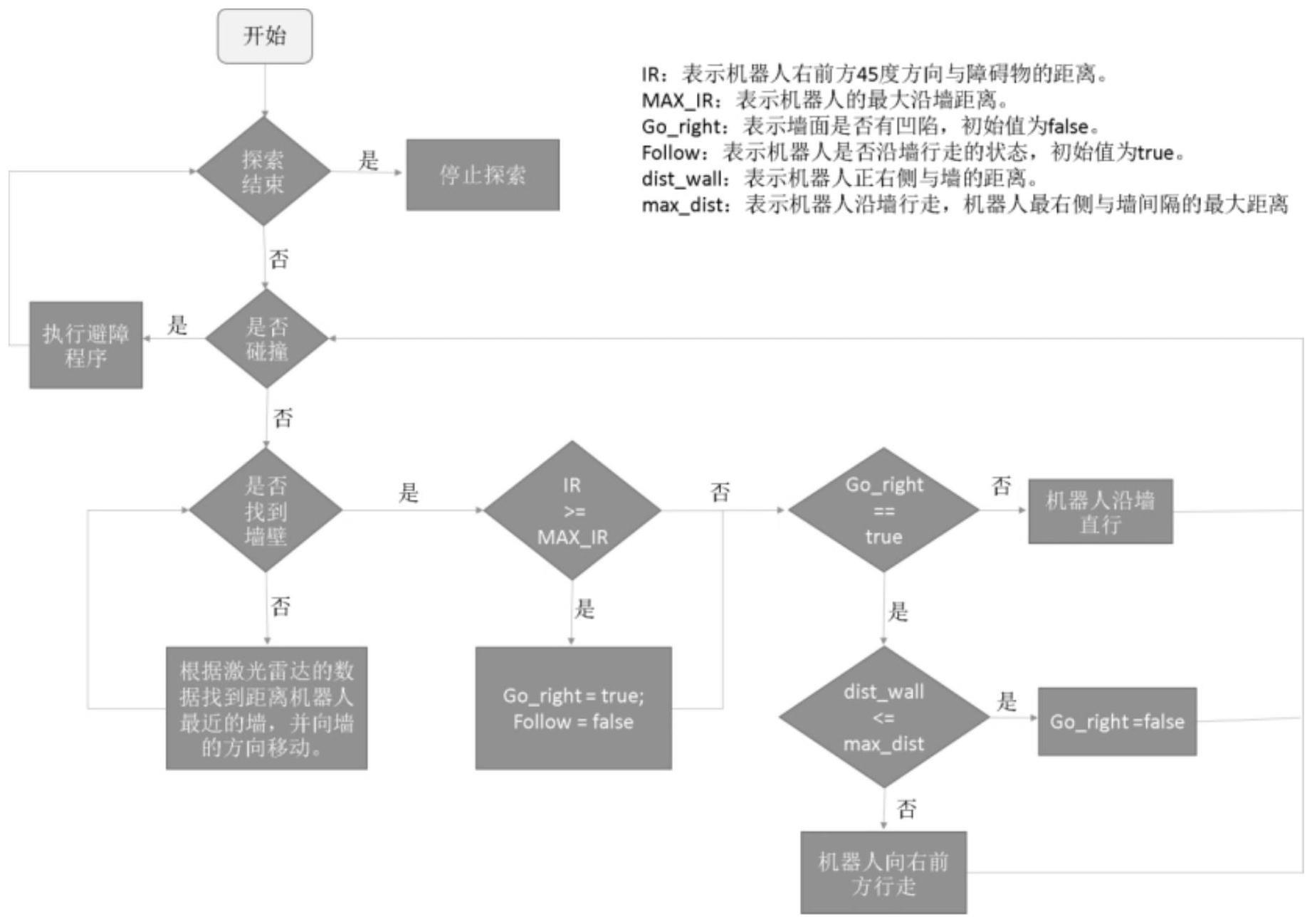
3、s1,开始探索工作,包括初始化设置:
4、在探索开始前,会设定一个max_dist,设定的扫地机器人与墙面保持的最大距离参数记作max_dist;设置一个参数max_ir,参数max_ir表示扫地机器人的沿墙最大距离;
5、s2,判断是否探索工作结束?如果是,则停止探索;如果否,则进行步骤s3;
6、s3,判断是否发生碰撞?如果是,则执行避障程序,进而返回s2;如果否,则
7、s4,判断是否找到墙壁?如果否,则进行步骤s5;如果是,则进行s6;
8、s5,根据激光雷达获得的数据找到距离扫地机器人最近的墙,并向墙的方向移动;进而返回s4;
9、s6,判断是否ir≥max_ir?其中,所述激光雷达获取右前方的墙面距扫地机器人的距离记为ir;如果是,则进行s7;如果否,则进行s8;
10、s7,赋值go_right=ture,follow=false,其中,go_right表示墙壁是否有凹陷,初始值为false;follow表示扫地机器人是否沿墙行走的状态,初始值为true;
11、s8,判断是否go_right==ture?如果是,则机器人沿墙直行,并进而返回步骤s3;如果否,则进行s9;
12、s9,判断是否dist_wall≤max_dist?其中,在扫地机器人正右方即机器人前进方向顺时针旋转90度通过所述激光雷达测得机器人右侧距墙面的距离记为dist_wall;如果是,则赋值go_right=ture,并进而返回步骤s3;如果否,则进行s10;
13、s10,机器人向右前方行走,进而返回步骤s3。
14、所述扫地机器人包括:移动底盘、扫地机器人本体、激光雷达(1)、扫地机器人前端的防碰撞传感器(2)、控制扫地机器人各部件的控制器以及用于存储扫地机器人产生的各种数据的存储器,所述激光雷达是一个360度旋转的单线激光雷达(1),能够实时获取机器人周围360度范围内障碍物离机器人的距离;所述防碰撞传感器(2)能够感应到机器人前方180度范围内是否有障碍物碰撞,并且能够感应到障碍物相对于机器人所在的位置角度;所述激光雷达(1)能够实时获取数据。
15、所述执行避障程序:扫地机器人前方的碰撞传感器(2)能够获取机器人与障碍物接触的方向,通过碰撞传感器获取到的数据来控制扫地机器人做相应的避障响应:
16、当所述碰撞传感器(2)输出的碰撞点在扫地机器人的前方顺时针60度方向,则扫地机器人会做出向左转的动作,转动的角度由碰撞的角度来决定;
17、当扫地机器人正前方受到碰撞,则扫地机器人会向后方倒退一个安全距离并且会向左转30度;
18、当扫地机器人的左前方受到碰撞时,扫地机器人会向右转,转动的角度由碰撞的角度来决定;
19、当有多个方向同时受到碰撞,则让扫地机器人向后行走,移动至没有碰撞为止。
20、所述步骤s5进一步包括:
21、当扫地机器人在一个未知区域接收到沿墙的控制指令后,它会启动沿墙的程序,依次执行如下的操作;
22、s5.1,扫地机器人需要找到离其距离最近的墙,找墙的过程是控制器通过查找激光雷达的数据,找到激光雷达数据中的最小的数据,并朝该最小数据的方向移动;
23、s5.2,当墙面与扫地机器人的距离在一定范围内,则表示扫地机器人找到了墙壁,并记录下当前扫地机器人在地图上的坐标并存储,这个坐标作为机器人开始沿墙行走的初始点;
24、s5.3,当扫地机器人找到墙壁之后就开始进行步骤s6的操作;
25、s5.4,当扫地机器人再次路过开始沿墙工作的初始点时,就让机器人停止探索,也即代表机器人已经沿着墙壁走了一个回环,将整个房间探索一遍。
26、所述步骤s5.2中,所述的一定范围内是小于0.02m。
27、所述步骤s6中,在机器人前方顺时针45度方向上能够通过所述激光雷达来获取右前方的墙面距机器人的距离ir,通过这个距离能够判断出右前方的墙面是否有凸出或凹陷的情况,并根据相应的情况做出相应的调整:通过ir数据来判断右前方是否有凸出或凹陷的墙面,需要设置参数max_ir,当ir大于或等于max_ir的时候需要更改go_right和follow的状态值,其中,go_right表示墙壁是否有凹陷,初始值为false;follow表示扫地机器人是否沿墙行走的状态,初始值为true。
28、所述步骤s9中,扫地机器人通过激光雷达获得顺时针90度方向距墙的距离dist_wall,并将该距离传给机器人控制器和存储器。
29、所述步骤s10中,当dist_wall>max_dist的时候,扫地机器人会向前方顺时针60度方向前进,使得机器人本体更加贴近墙壁。
30、所述参数max_ir为0.26m;所述max_dist=0.02m。
31、由此,本申请的优势在于:本申请的方案使用简单的方法,通过融合碰撞传感器和激光雷达的数据,设计出更加全面的算法逻辑,使得扫地机器人能够在沿墙探索的过程中更加贴近墙面,同时增加了扫地机器人脱困的灵活性。相比较于使用沿墙红外测距传感器的方法,本方法省去了额外的沿墙红外测距传感器,将碰撞传感器的数据与激光雷达传感器的数据进行融合,使得扫地机器人在沿墙的过程中能够更加贴近墙面,从而可以提高扫地机器人的清扫覆盖率,使得墙角处的灰尘能够被打扫。同时通过碰撞传感器可以使得扫地机器人能够轻松应对移动障碍物,不易被困在复杂的障碍物环境中。
技术特征:
1.一种扫地机器人沿墙探索的控制方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的一种扫地机器人沿墙探索的控制方法,其特征在于,所述扫地机器人包括:移动底盘、扫地机器人本体、激光雷达(1)、扫地机器人前端的防碰撞传感器(2)、控制扫地机器人各部件的控制器以及用于存储扫地机器人产生的各种数据的存储器,所述激光雷达是一个360度旋转的单线激光雷达(1),能够实时获取机器人周围360度范围内障碍物离机器人的距离;所述防碰撞传感器(2)能够感应到机器人前方180度范围内是否有障碍物碰撞,并且能够感应到障碍物相对于机器人所在的位置角度;所述激光雷达(1)能够实时获取数据。
3.根据权利要求2所述的一种扫地机器人沿墙探索的控制方法,其特征在于,所述执行避障程序:扫地机器人前方的碰撞传感器(2)能够获取机器人与障碍物接触的方向,通过碰撞传感器获取到的数据来控制扫地机器人做相应的避障响应:
4.根据权利要求2所述的一种扫地机器人沿墙探索的控制方法,其特征在于,所述步骤s5进一步包括:
5.根据权利要求4所述的一种扫地机器人沿墙探索的控制方法,其特征在于,所述步骤s5.2中,所述的一定范围内是小于0.02m。
6.根据权利要求2所述的一种扫地机器人沿墙探索的控制方法,其特征在于,所述步骤s6中,在机器人前方顺时针45度方向上能够通过所述激光雷达来获取右前方的墙面距机器人的距离ir,通过这个距离能够判断出右前方的墙面是否有凸出或凹陷的情况,并根据相应的情况做出相应的调整:通过ir数据来判断右前方是否有凸出或凹陷的墙面,需要设置参数max_ir,当ir大于或等于max_ir的时候需要更改go_right和follow的状态值,其中,go_right表示墙壁是否有凹陷,初始值为false;follow表示扫地机器人是否沿墙行走的状态,初始值为true。
7.根据权利要求2所述的一种扫地机器人沿墙探索的控制方法,其特征在于,所述步骤s9中,扫地机器人通过激光雷达获得顺时针90度方向距墙的距离dist_wall,并将该距离传给机器人控制器和存储器。
8.根据权利要求2所述的一种扫地机器人沿墙探索的控制方法,其特征在于,所述步骤s10中,当dist_wall>max_dist的时候,扫地机器人会向机器人正前方顺时针60度方向前进,使得机器人本体更加贴近墙壁。
9.根据权利要求1所述的一种扫地机器人沿墙探索的控制方法,其特征在于,所述参数max_ir为0.26m;所述max_dist=0.02m。
技术总结
本发明提供一种扫地机器人沿墙探索的控制方法,通过融合碰撞传感器和激光雷达的数据,设计出更加全面的算法逻辑,使得扫地机器人能够在沿墙探索的过程中更加贴近墙面,同时增加了扫地机器人脱困的灵活性。相比较于只使用激光雷达进行沿墙工作的方法,本方法将碰撞传感器的数据与激光雷达传感器的数据进行融合,使得扫地机器人在沿墙的过程中能够更加贴近墙面,从而可以提高扫地机器人的清扫覆盖率,使得墙角处的灰尘能够被打扫。同时通过碰撞传感器可以使得扫地机器人能够轻松应对移动障碍物,不易被困在复杂的障碍物环境中。
技术研发人员:白明明
受保护的技术使用者:北京君正集成电路股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!