飞行控制方法、装置和系统与流程
本发明涉及飞行器控制领域,尤其涉及一种飞行控制方法、装置和系统。
背景技术:
1、多旋翼飞行器是一种能实现垂直起降的小型飞行器,因其体型小巧,灵活性高,成本低,易维护等特点受到关注。而且多旋翼飞行器能在各种受限环境中工作,无论是丛林,地底或者是室内环境等场景。多旋翼飞行器安全可靠的飞行与飞行器自身各组件安全可靠的运行是密不可分的,在飞行过程中,如果某个旋翼电机在飞行过程中出现了问题,单个旋翼电机的故障可能会扩散进而影响整个飞行器正常运行。
技术实现思路
1、本发明实施例提供了一种飞行控制方法、装置和系统,通过检测飞行器旋翼电机稳态时的转速和电流判断其是否出现故障,并在旋翼电机出现故障时使其切换至安全飞行状态,避免该旋翼电机影响整个飞行器的正常工作。
2、第一方面,本发明实施例提供了一种飞行控制方法,包括:
3、根据飞行控制器输出的期望油门,确定旋翼电机的期望转速和期望电流;
4、确定所述旋翼电机的实际转速是否与所述期望转速符合第一稳态关系;
5、确定所述旋翼电机的实际电流是否与所述期望电流符合第二稳态关系;
6、如果所述旋翼电机的实际转速与所述期望转速不符合第一稳态关系,和/或,所述旋翼电机的实际电流与所述期望电流不符合第二稳态关系,则控制所述旋翼电机由正常飞行状态切换至安全飞行状态。
7、一种实现方式中,根据飞行控制器输出的期望油门,所述确定旋翼电机的期望转速和期望电流,包括:
8、根据预先存储的稳态关联表,将所述期望油门在所述稳态关联表相关联的转速和电流确定为所述期望转速和所述期望电流。
9、一种实现方式中,所述确定所述旋翼电机的实际转速是否与所述期望转速符合第一稳态关系,包括:若所述期望转速和所述实际转速的差值的绝对值小于第一阈值,则确定所述实际转速与所述期望转速符合第一稳态关系,否则,确定所述实际转速与所述期望转速不符合第一稳态关系;
10、所述确定所述旋翼电机的实际电流是否与所述期望电流符合第二稳态关系,包括:若所述期望电流和所述实际电流的差值的绝对值小于第二阈值,则确定所述实际电流与所述期望电流符合第二稳态关系,否则,确定所述实际电流与所述期望电流不符合第二稳态关系。
11、一种实现方式中,所述控制所述旋翼电机由正常飞行状态切换至安全飞行状态,包括:
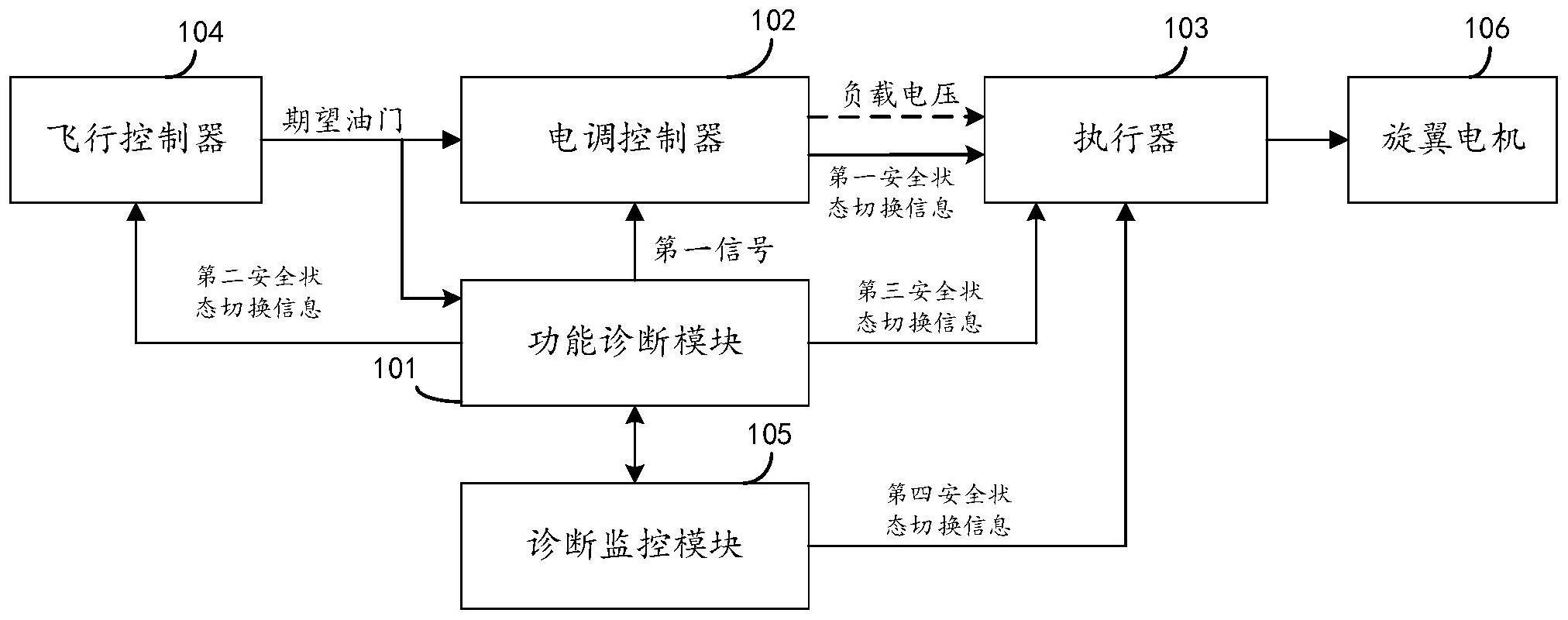
12、向电调控制器发送第一信号,所述第一信号用于指示所述电调控制器向执行器发送第一安全状态切换信息,所述第一安全状态切换信息用于指示所述执行器停止对所述旋翼电机供电。
13、一种实现方式中,所述控制所述旋翼电机由正常飞行状态切换至安全飞行状态,包括:
14、向所述飞行控制器发送第二安全状态切换信息,所述第二安全状态切换信息用于所述飞行控制器将所述旋翼电机对应的期望油门输出为0。
15、一种实现方式中,所述向电调控制器发送第一信号之后,所述方法还包括:
16、检测所述执行器是否停止对所述旋翼电机供电;
17、如果所述执行器未停止对所述旋翼电机供电,则向所述执行器发送第三安全状态切换信息,所述第三安全状态切换信息用于指示所述执行器停止对所述旋翼电机供电。
18、一种实现方式中,所述方法应用于功能诊断模块,所述方法还包括:
19、接收诊断监控模块发送的监控信息,所述监控信息用于检测所述功能诊断模块是否处于正常运转状态;
20、如果在收到所述监控信息的预设时间内未发送对应的响应信息,则触发所述诊断监控模块向执行器发送第四安全状态切换信息,所述第四安全状态切换信息用于所述执行器停止对所述旋翼电机供电;
21、其中,所述响应信息由所述功能诊断模块根据所述监控信息确定。
22、第二方面,本发明实施例提供了一种飞行控制装置,包括:
23、确定单元,用于根据飞行控制器输出的期望油门,确定旋翼电机的期望转速和期望电流;用于确定所述旋翼电机的实际转速是否与所述期望转速符合第一稳态关系;还用于确定所述旋翼电机的实际电流是否与所述期望电流符合第二稳态关系;
24、处理单元,用于如果所述旋翼电机的实际转速与所述期望转速不符合第一稳态关系,和/或,所述旋翼电机的实际电流与所述期望电流不符合第二稳态关系,则通过电调控制器控制所述旋翼电机由正常飞行状态切换至安全飞行状态。
25、第三方面,本发明实施例提供了一种飞行控制芯片,包括:
26、至少一个处理器;以及
27、与所述处理器通信连接的至少一个存储器,其中:
28、所述存储器存储有可被所述处理器执行的程序指令,所述处理器调用所述程序指令能够执行第一方面或者第一方面任一实施例的方法。
29、第四方面,本发明实施例提供了一种飞行控制系统,所述系统包括:飞行控制器和功能诊断模块;
30、所述飞行控制器,用于向所述功能诊断模块提供旋翼电机的期望油门;
31、所述功能诊断模块,用于根据所述期望油门以及所述旋翼电机的实际转速和实际电流,执行第一方面或者第一方面任一实施例所述的方法。
技术特征:
1.一种飞行控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据飞行控制器输出的期望油门,确定旋翼电机的期望转速和期望电流,包括:
3.根据权利要求1所述的方法,其特征在于,
4.根据权利要求1所述的方法,其特征在于,所述控制所述旋翼电机由正常飞行状态切换至安全飞行状态,包括:
5.根据权利要求1所述的方法,其特征在于,所述控制所述旋翼电机由正常飞行状态切换至安全飞行状态,包括:
6.根据权利要求4所述的方法,其特征在于,所述向电调控制器发送第一信号之后,所述方法还包括:
7.根据权利要求1所述的方法,其特征在于,所述方法应用于功能诊断模块,所述方法还包括:
8.一种飞行控制装置,其特征在于,包括:
9.一种飞行控制芯片,其特征在于,包括:
10.一种飞行控制系统,其特征在于,所述系统包括:飞行控制器和功能诊断模块;
技术总结
本发明涉及飞行器控制领域,尤其涉及一种飞行控制方法、装置和系统。先根据飞行控制器输出的期望油门,确定旋翼电机的期望转速和期望电流,然后确定旋翼电机的实际转速是否与期望转速符合第一稳态关系,同时确定旋翼电机的实际电流是否与期望电流符合第二稳态关系,如果旋翼电机的实际转速与期望转速不符合第一稳态关系,和/或,旋翼电机的实际电流与期望电流不符合第二稳态关系,则控制旋翼电机由正常飞行状态切换至安全飞行状态。当检测到任一旋翼电机出现异常时,控制该旋翼电机由正常飞行状态切换至安全飞行状态,避免该旋翼电机的故障扩散从而影响整个无人机的正常运行。
技术研发人员:张培磊,李熊,刘洋,李金龙,彭萌
受保护的技术使用者:北京三快在线科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!