一种机器人定向驱离系统及方法与流程
本发明涉及安全防范设备,更具体涉及一种机器人定向驱离系统及方法。
背景技术:
1、声波驱散器经过三十多年的发展,在边防以及机场驱鸟等方向得到了越来越广泛的应用,定向声波驱散器是利用一个或多个高指向性声波发射单元定向发生声波的技术装备,通常情况下是在正前方产生高压强声波,用于人员或者鸟兽的驱离。
2、目前的声波驱散器大多为固定安装的形式,如专利申请号为cn201920834986.0的中国实用新型专利公开的一种防爆型声波驱散器防护装置,虽然该装置能够避免大雨天气下雨水直接冲击驱散器本体,但是该装置是通过三角形支架直接固定设置在地面上的,其无法针对于山地、丛林、岸滩、沙漠、雪地、泥泞等特殊复杂地域的声波驱散。并且目前的声波驱散器在远距离声波传输方面仍有不足之处,声波驱散器无法对信号进行远距离传输,而在特殊地域环境下,不仅周边环境复杂,存在较多的不稳定因素,会导致信号无法较好地传输。
3、机器人定向驱离系统作为一种非致命性武器,相对传统武器而言,不会直接产生装备毁灭和生态环境的破坏,而是通过“软杀伤、软破坏”的技术手段,使敌方作战能力丧失和削弱的“人道性”武器。针对目前的声波驱散器存在的问题,研发一种机器人定向驱离系统显得十分重要。
技术实现思路
1、本发明需要解决的技术问题是提供一种机器人定向驱离系统及方法,以解决背景技术中的问题。
2、为解决上述技术问题,本发明所采取的技术方案如下。
3、一种机器人定向驱离系统,包括:
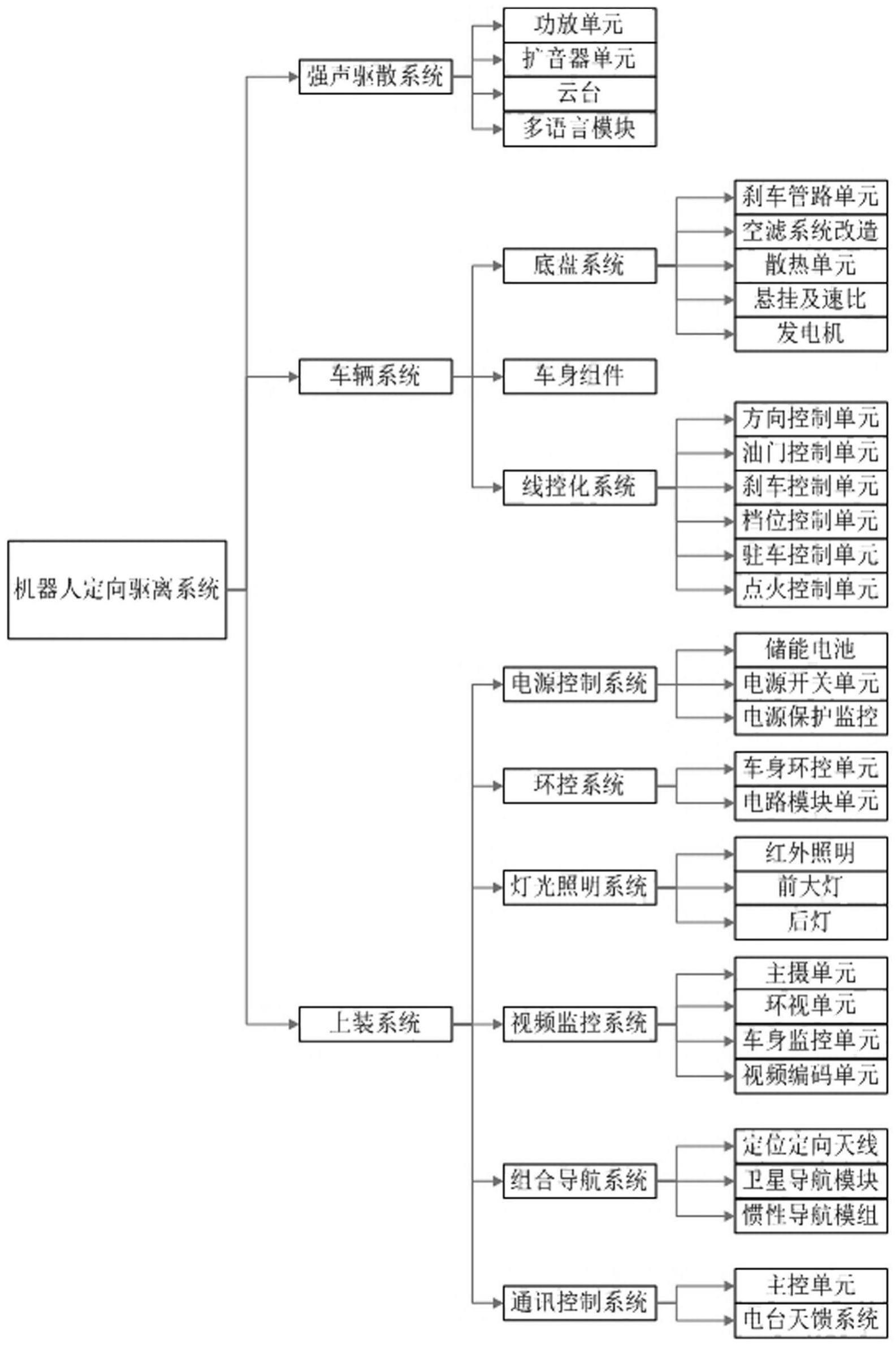
4、上装系统,包括视频监控系统、组合导航系统、通讯控制系统、光电塔台;所述视频监控系统,用于对目标位置进行拍摄;所述组合导航系统,用于对路径进行规划;所述通讯控制系统,用于将拍摄的目标信息进行传输;所述光电塔台,用于对目标进行搜索、侦查、监视、跟踪,并反演出目标的地理位置信息;
5、强声驱散系统,用于将接收到的目标信息,直接转向目标位置,对目标进行强声驱离;
6、车辆系统,用于驱动装置整体进行移动,所述上装系统与强声驱散系统均安装在车辆系统上;
7、无线操控平台,与车辆系统进行无线通信,对车辆系统进行远程操控。
8、进一步优化技术方案,所述强声驱散系统包括:
9、扩音器单元,用于输出高分贝的声波;
10、功放单元,用于为扩音器单元提供预处理并放大的音频信号;
11、云台,用于带动扩音器单元实现俯仰和方位方向的转动;
12、多语言模块,用于提供多种语言离线翻译功能。
13、进一步优化技术方案,所述功放单元包括信号处理模块、网络控制模块、滤波电源模块和功率放大器。
14、进一步优化技术方案,所述云台包括:
15、机械台体,用于能够进行俯仰和方位的转动;
16、控制系统,用于控制机械台体的动作;
17、负载支架。
18、进一步优化技术方案,所述上装系统还包括:
19、电源控制系统,用于为上装系统提供电能;
20、环控系统,用于为车身周围环境进行控制;
21、灯光照明系统。
22、一种机器人定向驱离方法,该方法基于所述的一种机器人定向驱离系统进行,包括以下步骤:
23、对路径进行规划,对目标位置进行拍摄,进行巡逻任务;
24、对目标进行全天候搜索、侦查、监视、跟踪,反演出目标的地理位置信息,将目标信息通过无线传输的方式发送到强声驱散系统和指挥室;
25、强声驱散系统收到的目标信息后,直接转向目标位置,通过非致命的手段对目标进行强声驱离。
26、进一步优化技术方案,采用宽动态算法技术对目标位置进行拍摄,宽动态算法技术包括以下步骤:
27、s1、提取待处理图像的亮度分量;
28、s2、使用亮度分量的像素领域信息计算每个像素点的环境因子;
29、s3、根据人眼视觉系统特点,利用环境因子得到宽动态变换公式;
30、s4、利用宽动态变换公式得到宽动态范围图像;
31、s5、gamma校正。
32、进一步优化技术方案,将强声驱散系统中的扩音器单元和功放单元进行模块化设计,每一个声源为一个扩音器模块和功放模块,既能够单独工作,也能够快速自由组合,形成发声器阵列。
33、进一步优化技术方案,采用全数字功放多通道动态平衡技术对强声驱散系统进行设计。
34、由于采用了以上技术方案,本发明所取得技术进步如下。
35、本发明机器人定向驱离系统是一个集指向性声源技术、声源阵列技术、多语音模块技术、任务规划技术、平台机动技术、导航技术、野外通信技术、自然认知操作技术于一体的操作平台,主要用于边海防、峰会安保、军队战略后方仓库、维稳反恐、实战应用、要地巡逻等大范围区域的高机动式声波打击、多语种模块离线广播和远距离喊话、昼夜巡逻、定点值守、侦查攻击、情报搜集、通讯中继,可与作战人员形成“有人-无人”平台协同作战能力,为官兵的生命安全建立起一道防火墙。
36、本发明机器人定向驱离系统具有远程遥控、目标跟踪、预制地图和不搭载操作人员、无支撑环境的情况下自主行驶四种工作模式。采用一体化、模块化设计特点,自身防御系统完善,整体外观为低rcs隐身、低红外特征、反劫持设计,针对不同威胁,无人平台可做机动规避、诱骗干扰等动作。能够在战场上协助作战人员并与之形成互补,极大地减少战时伤亡人数并提高军队作战效能。
37、本发明采用全数字功放多通道动态平衡技术对强声驱散系统进行设计:多通道、大功率、高保真的全数字式功放,应用实时保护技术能够在各个通道进行动态负载平衡。控制多通道声源信号相位一致,基于class d类音频放大技术,设计了多通道的高效率功放阵列,采用单级功率放大器,直接结合电源与功放,交流电通过整流模块直接为功放级供电,效率更高。而且后级采用电能回收装置,将感性负载的无效功率回收,进一步提高效率。可满足严苛条件下的功率驱动和散热要求。
38、本发明电源双向隔离、自适应冗余管理技术:自适应冗余电源管理提高设备可靠性,同时进行前后双向隔离以满足电磁兼容标准对电源线传导发射和敏感度的要求。
39、本发明采用宽动态算法技术对目标位置进行拍摄,使图像能够覆盖更宽的动态范围,有效提高场景的成像质量。
40、本发明中对目标进行跟踪的方法是基于轮廓跟踪技术的:利用物体的边界轮廓作为模板,在后继帧的二值边缘图像中跟踪目标轮廓,并且该轮廓能够自动连续地更新。相对于基于区域的跟踪方法,轮廓跟踪方法在计算量较小的情况下基本上可以达到较好的匹配效果,如果开始能够合理地分开每个运动目标并实现轮廓初始化的话,即使在有部分遮挡存在的情况下也能连续地进行跟踪。
技术特征:
1.一种机器人定向驱离系统,其特征在于,包括:
2.根据权利要求1所述的一种机器人定向驱离系统,其特征在于,所述强声驱散系统包括:
3.根据权利要求2所述的一种机器人定向驱离系统,其特征在于,所述功放单元包括信号处理模块、网络控制模块、滤波电源模块和功率放大器。
4.根据权利要求2所述的一种机器人定向驱离系统,其特征在于,所述云台包括:
5.根据权利要求1所述的一种机器人定向驱离系统,其特征在于,所述上装系统还包括:
6.一种机器人定向驱离方法,其特征在于,该方法基于权利要求1至5任意一项所述的一种机器人定向驱离系统进行,包括以下步骤:
7.根据权利要求6所述的一种机器人定向驱离方法,其特征在于,采用宽动态算法技术对目标位置进行拍摄,宽动态算法技术包括以下步骤:
8.根据权利要求6所述的一种机器人定向驱离方法,其特征在于,将强声驱散系统中的扩音器单元和功放单元进行模块化设计,每一个声源为一个扩音器模块和功放模块,既能够单独工作,也能够快速自由组合,形成发声器阵列。
9.根据权利要求6所述的一种机器人定向驱离方法,其特征在于,采用全数字功放多通道动态平衡技术对强声驱散系统进行设计。
技术总结
本发明公开了一种机器人定向驱离系统及方法,所述系统包括上装系统、强声驱散系统、无线操控平台和车辆系统;上装系统,包括视频监控系统、组合导航系统、通讯控制系统、光电塔台;强声驱散系统,用于将接收到的目标信息,直接转向目标位置,对目标进行强声驱离;车辆系统,用于驱动装置整体进行移动,所述上装系统与强声驱散系统均安装在车辆系统上;无线操控平台,与车辆系统进行无线通信,对车辆系统进行远程操控。本发明采用一体化、模块化设计特点,自身防御系统完善,针对不同威胁,无人平台可做机动规避、诱骗干扰等动作。本发明能够在战场上协助作战人员并与之形成互补,极大地减少战时伤亡人数并提高军队作战效能。
技术研发人员:朱马炮,杨玲珍,苑晓东,叶斌,吴云峰
受保护的技术使用者:北京中安航信科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!