自动移动装置及其控制系统的制作方法
本申请涉及自动移动装置,更具体地,涉及一种例如为自动引导运输车或者自主移动机器人的自动移动装置及其控制系统。
背景技术:
1、随着仓储物流行业的快速发展,通过人工进行物料转运输送的传统方式已经不能满足需求,工厂自动化物流系统受到了国内外越来越多的关注。在工厂自动化物流系统中,自动引导运输车(automated guided vehicle,简称agv)和自主移动机器人(autonomousmobile robot,简称amr)是其中最为重要的组成部分,负责进行物料的转运。
2、现阶段,应用于agv/amr的即时定位与地图构建(simultaneous localizationand mapping,简称slam)需要轮速计、惯性测量单元(inertial measurement unit,简称imu)和摄相机、激光雷达等传感器的数据进行融合,采集的各传感器数据的准确性、同步性和实效性是确保agv/amr能够准确定位和精确导航的关键所在。
3、但是各传感器并没有统一的时间,无法满足数据融合所需要的高时间同步性。
4、例如,目前各传感器数据所采用的时间都是采集到数据的时间,这个时间具有一定的统一性,但是由于数据传输及传感器的响应速度等原因,这个时间一致性并不高。特别是在传输网络受到干扰等一些特殊情况下,甚至可能会有很大的不一致性,对定位精度产生较大影响。
5、国内外现有的多传感器数据采集技术总体而言具有以下几个缺点:
6、(1)多类不同传感器的时间基准不统一,难以有效进行传感器数据融合;
7、(2)处理器运行的操作系统是linux,属于非实时操作系统,采集传感器数据并打时间戳的方式无法保证实时,时间戳波动大;
8、(3)自动引导运输车或者自主移动机器人多应用于室内场景,无gps授时。
技术实现思路
1、本申请提供了一种可至少部分解决相关技术中存在的上述问题或现有技术中其它技术问题的自动移动装置及其控制系统。
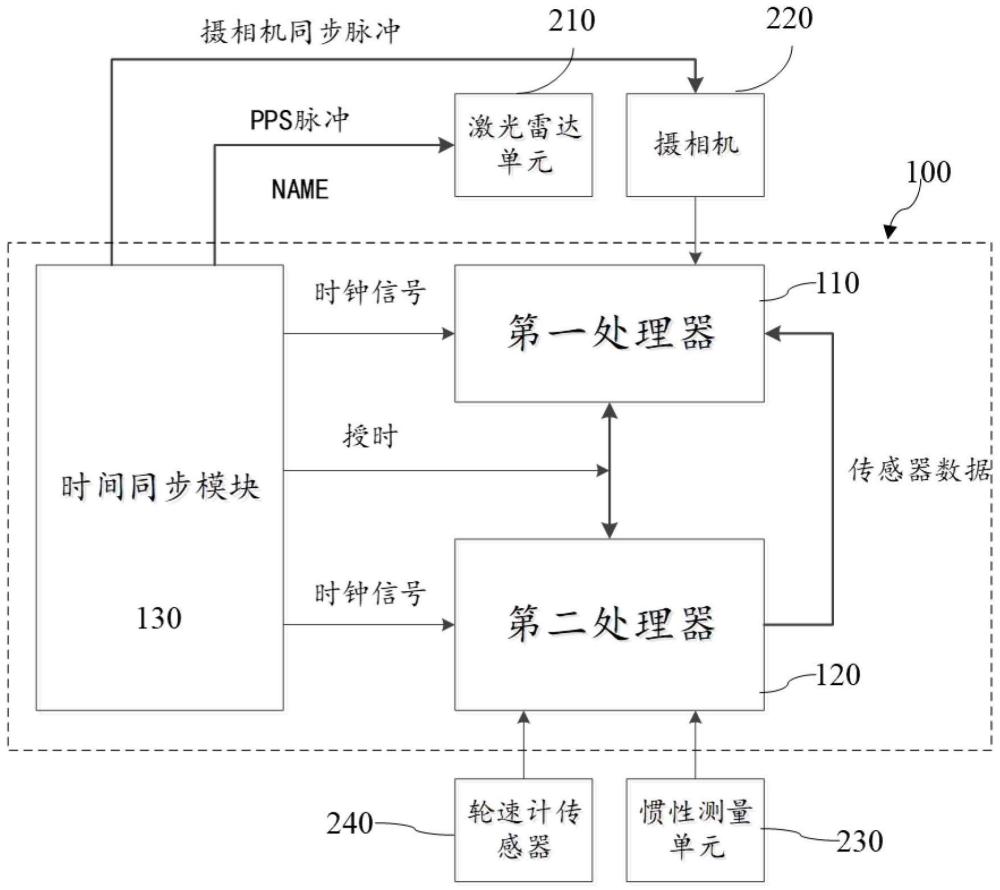
2、本申请第一方面提供一种自动移动装置的控制系统,包括:第一处理器,配置有中央处理器,具有至少一个第一传感器接口,所述第一传感器接口配置为连接至具有授时功能的传感器;第二处理器,配置有实时操作系统,具有至少一个第二传感器接口,所述第二传感器接口配置为连接至不具有授时功能的传感器,所述第二处理器与所述第一处理器连接,将通过所述第二传感器接口接收的传感器数据传输至所述第一处理器;以及时间同步模块,配置为对所述具有授时功能的传感器和所述第二处理器授时,以使所述第一处理器中通过所述第一传感器接口接收的传感器数据与通过所述第二传感器接口接收的传感器数据保持时间同步。
3、在一些实施方式中,所述时间同步模块包括:时钟;以及第一时间戳生成器,所述第一时间戳生成器基于从所述时钟获得的时间生成第一时间戳,以向所述具有授时功能的传感器采集的传感器数据提供所述第一时间戳,所述第一时间戳指示所述具有授时功能的传感器采集传感器数据的时间;其中,所述第一处理器通过所述第一传感器接口接收包括有所述第一时间戳的传感器数据。
4、在一些实施方式中,所述时间同步模块还包括:第二时间戳生成器,所述第二时间戳生成器基于从所述时钟获得的时间生成第二时间戳,以向通过所述第二传感器接口接收的传感器数据提供所述第二时间戳,所述第二时间戳指示通过所述第二传感器接口接收传感器数据的时间;其中,所述第二处理器将包括有所述第二时间戳的传感器数据传输至所述第一处理器。
5、在一些实施方式中,所述时间同步模块还配置为基于从所述时钟获得的时间分别向所述第一处理器和所述第二处理器输出时钟信号,以使所述第一处理器和所述第二处理器的系统时间保持同步。
6、在一些实施方式中,所述具有授时功能的传感器为激光雷达单元。
7、在一些实施方式中,所述第一处理器还连接至摄相机;其中,所述时间同步模块还包括:脉冲生成器,所述脉冲生成器基于所述摄相机的帧率和所述激光雷达单元的雷达频率生成摄相机触发脉冲并记录所述摄相机触发脉冲的时间序列;其中,所述摄相机触发脉冲被发送至所述摄相机以使所述摄相机采集摄相机数据;所述摄相机触发脉冲的时间序列被发送至所述第一处理器,以使所述摄相机数据与所述摄相机触发脉冲的时间序列在所述第一处理器中绑定。
8、在一些实施方式中,所述不具有授时功能的传感器为轮速计传感器和/或惯性测量单元。
9、在一些实施方式中,所述第二处理器与所述第一处理器通过简单通信接口连接。
10、在一些实施方式中,所述第二处理器为mcu芯片或者fpga芯片。
11、本申请第二方面提供一种自动移动装置,包括:根据上述的控制系统,以及多个传感器,所述多个传感器中包括至少一个具有授时功能的传感器和至少一个不具有授时功能的传感器,所述具有授时功能的传感器连接至所述述第一传感器接口,所述不具有授时功能的传感器连接至所述第二传感器接口。
12、本申请至少一个实施方式提供的自动移动装置的控制系统,通过将不具有授时功能的传感器连接至配置有实时操作系统的第二处理器,并通过时间同步模块对具有授时功能的传感器和第二处理器采用同源时钟授时,第一处理器直接接收具有授时功能的传感器所采集的传感器数据,再通过第二处理器接收不具有授时功能的传感器所采集的传感器数据,这样可以保证第一处理器中所获得的各个传感器数据的时间统一性,有利于对这些传感器数据进行数据融合,确保对自动引导运输车或者自主移动机器人的准确定位和精确导航。
技术特征:
1.一种自动移动装置的控制系统,其特征在于,包括:
2.根据权利要求1所述的控制系统,其特征在于,所述时间同步模块包括:
3.根据权利要求2所述的控制系统,其特征在于,所述时间同步模块还包括:
4.根据权利要求2所述的控制系统,其特征在于,
5.根据权利要求2所述的控制系统,其特征在于,
6.根据权利要求5所述的控制系统,其特征在于,所述第一处理器还连接至摄相机;
7.根据权利要求3所述的控制系统,其特征在于,
8.根据权利要求1至7中任一项所述的控制系统,其特征在于,
9.根据权利要求8所述的控制系统,其特征在于,
10.一种自动移动装置,其特征在于,包括:
技术总结
本申请提供一种自动移动装置及其控制系统,控制系统包括第一处理器、第二处理器和时间同步模块。第一处理器配置为中央处理器,具有至少一个第一传感器接口,第一传感器接口配置为连接至具有授时功能的传感器。第二处理器配置有实时操作系统,具有至少一个第二传感器接口,第二传感器接口配置为连接至不具有授时功能的传感器,第二处理器与第一处理器连接,将通过第二传感器接口接收的传感器数据传输至第一处理器。时间同步模块配置为对具有授时功能的传感器和第二处理器授时,以使第一处理器中通过第一传感器接口接收的传感器数据与通过第二传感器接口接收的传感器数据保持时间同步。这样有利于对这些传感器数据进行数据融合。
技术研发人员:马亚飞,石文凤,何江,陈仕韬
受保护的技术使用者:舜宇光学(浙江)研究院有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!