机器人过狭窄通道的方法、装置、机器人及存储介质与流程
本申请涉及智能机器人,具体涉及机器人过狭窄通道的方法、装置、机器人及存储介质,尤其适用于机器人在酒店执行任务的过程中,过闸机或屏蔽门。
背景技术:
1、目前,智能机器人可以应用于酒店、写字楼等公共场所,执行对应的任务,机器人在执行任务的过程中,可以过狭窄通道,例如,过闸机、屏蔽门等。
2、但是,由于狭窄通道的宽度较窄,机器人在过狭窄通道时,会将狭窄通道两侧的墙壁或者将闸机门两侧的门框检测为障碍物,并停止移动,以至于无法继续完成配送任务。
3、另外,由于闸机门或屏蔽门有些为透明门,使得智能机器人无法准确识别到,容易发生碰撞,导致闸机通道堵塞或者闸机门、屏蔽门的损坏等,也降低了机器人执行任务的效率。
4、因此,有必要对现有技术予以改良以克服现有技术中的所述缺陷。
技术实现思路
1、本申请的目的在于提供一种机器人过狭窄通道的方法、装置、设备及存储介质,用于解决目前机器人过狭窄通道的过程中,容易发生碰撞、工作效率低的问题。
2、本申请的目的是通过以下技术方案实现的:
3、第一方面,提供一种机器人的机器人过狭窄通道的方法,包括:
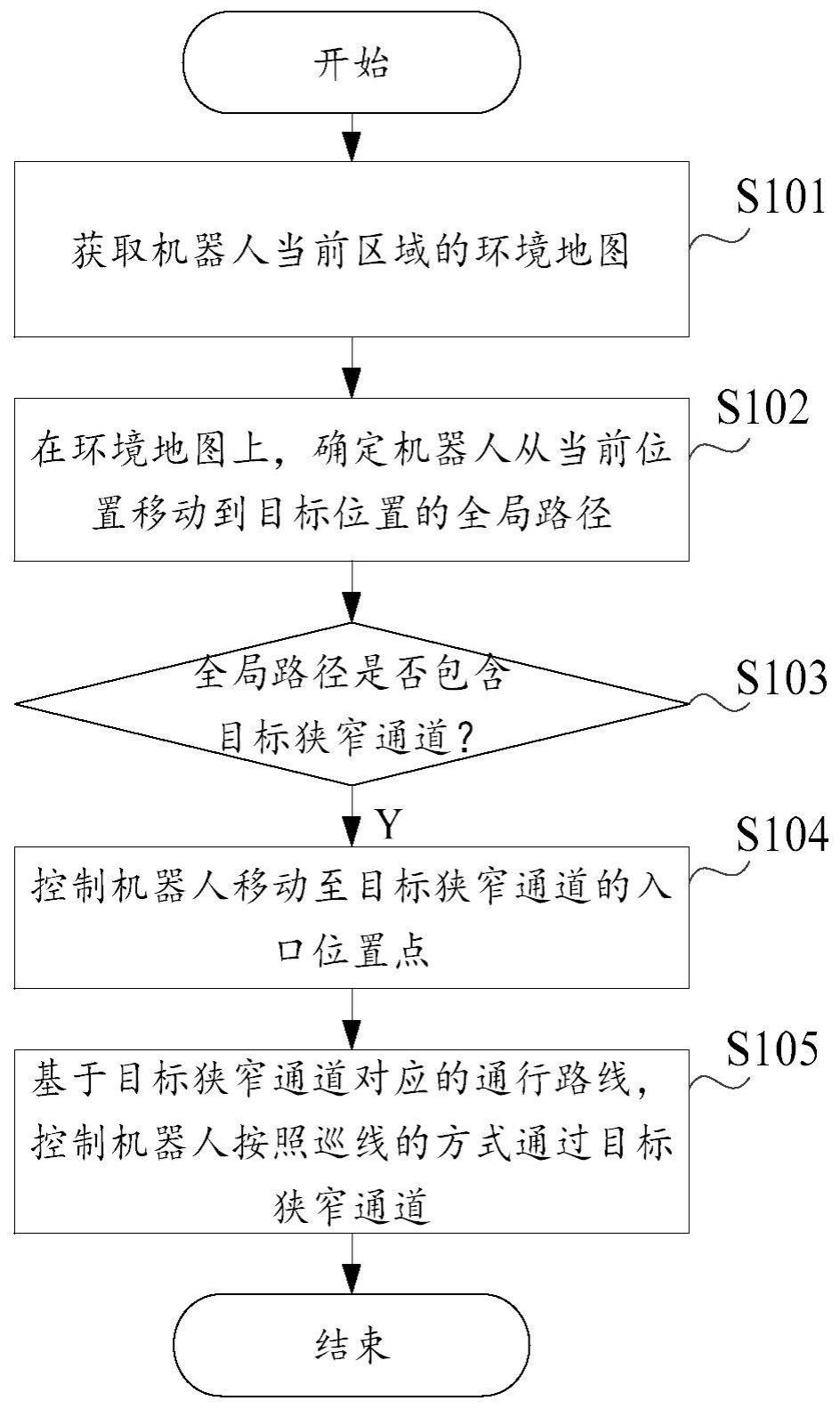
4、获取机器人当前区域的环境地图,所述环境地图上标注有狭窄通道、所述狭窄通道对应的入口位置点和出口位置点,以及机器人在所述狭窄通道从入口位置点到出口位置点的通行路线;
5、在所述环境地图上,确定机器人从当前位置移动至目标位置的全局路径;
6、确定所述全局路径包含的目标狭窄通道;
7、控制所述机器人移动至所述目标狭窄通道对应的入口位置点;
8、基于所述目标狭窄通道对应的通行路线,控制机器人按照巡线的方式通过所述目标狭窄通道。
9、可选地,根据本申请第一方面实施例所述的机器人过狭窄通道的方法,所述出口位置点和所述入口位置点相对设置,所述通行路线为所述入口位置点到所述出口位置点之间的一条直线段。
10、可选地,根据本申请第一方面实施例所述的机器人过狭窄通道的方法,所述确定全局路径中包含的目标狭窄通道,包括:
11、确定所述全局路径与所述环境地图上各狭窄通道对应的通行路线的偏差,得到满足预设条件的偏差;
12、将所述满足预设条件的偏差对应的狭窄通道确定为目标狭窄通道。
13、可选地,根据本申请第一方面实施例所述的机器人过狭窄通道的方法,所述确定所述全局路径与所述环境地图上各狭窄通道对应的通行路线的偏差,包括:
14、计算所述狭窄通道的入口位置点到所述全局路径的第一距离;
15、计算所述狭窄通道的出口位置点到所述全局路径的第二距离;
16、基于所述第一距离和所述第二距离,确定所述全局路径与所述狭窄他送到的通行路线的偏差。
17、可选地,根据本申请第一方面实施例所述的机器人过狭窄通道的方法,所述环境地图上还标注有狭窄通道的宽度,所述方法,还包括:
18、获取所述目标狭窄通道的宽度;
19、当机器人移动至所述目标狭窄通道的入口位置点时,基于所述目标狭窄通道的宽度,调整机器人对障碍物的探测半径;
20、控制机器人按照调整后的所述探测半径在所述狭窄通道内移动。
21、可选地,根据本申请第一方面实施例所述的机器人过狭窄通道的方法,所述控制机器人按照调整后的所述探测半径在所述狭窄通道内移动之后,还包括:
22、当机器人移动至所述出口位置点时,将机器人对障碍物的探测半径恢复至初始设定值。
23、可选地,根据本申请第一方面实施例所述的机器人过狭窄通道的方法,所述环境地图上还标注有狭窄通道对应的通道标识,所述确定全局路径包含的目标狭窄通道之后,还包括:
24、基于所述通道标识,识别目标狭窄通道的类别,得到识别结果;
25、基于所述识别结果,控制机器人通行。
26、第二方面,提供一种机器人过狭窄通道的装置,包括:
27、地图获取模块,用于获取机器人当前区域的环境地图,所述环境地图上标注有狭窄通道、所述狭窄通道对应的入口位置点,以及机器人在所述狭窄通道的通行路线;
28、全局路径规划模块,用于在所述环境地图上,确定机器人从当前位置移动至目标位置的全局路径;
29、目标确定模块,用于确定所述全局路径包含的目标狭窄通道;
30、移动控制模块,用于基于所述目标狭窄通道对应的通行路线,控制机器人按照巡线的方式通过所述目标狭窄通道。
31、第三方面,提供一种机器人,包括处理器和存储器,其中,所述存储器中存储有计算机程序,所述计算机程序在被处理器执行时,用以实现本申请第一方面任一实施例所述方法的步骤。
32、第四方面,提供一种计算机存储介质,其上存储有计算机程序,所述计算机程序在被处理器执行时,用以实现本申请第一方面任一实施例所述方法的步骤。
33、与现有技术相比,本申请具有如下有益效果:本申请实施例过狭窄通道的方法获取机器人当前区域的环境地图,环境地图上标注有狭窄通道、狭窄通道对应的入口位置点和出口位置点,以及狭窄通道从入口位置点到出口位置点的通行路线,在环境路线上规划机器人从当前位置到目标位置的全局路径,并确定全局路径中包含的目标狭窄通道,然后控制机器人从当前位置移动至目标狭窄通道对应的入口位置点,然后在入口位置点处基于目标狭窄通道的通行路线,按照巡线的方式通过目标狭窄通道。这样,由于环境地图上标注了狭窄通道的通行路线,机器人沿预设好的通行路线移动,能够避免与狭窄通道发生碰撞,保证机器人顺利通过狭窄通道,提高机器人执行任务的效率。而且,机器人不需要实时检测与狭窄通道的距离,减少了资源浪费,降低了功耗。
34、另外,环境地图上还标注有狭窄通道的宽度,机器人在移动至狭窄通道的入口位置点后停靠,并根据狭窄通道的宽度调整对障碍物的探测半径,并基于该调整后的探测半径进行巡线,通过狭窄通道。本实施例中通过调整对障碍物的探测半径,能够保证机器人只能探测到位于狭窄通道内的障碍物,而避免将狭窄通道本身误判为障碍物,进一步提高机器人通过狭窄通道的稳定性。。
技术特征:
1.一种机器人过狭窄通道的方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述出口位置点和所述入口位置点相对设置,所述通行路线为所述入口位置点到所述出口位置点之间的一条直线段。
3.根据权利要求2所述的方法,其特征在于,所述确定所述全局路径中是否包含目标狭窄通道,包括:
4.根据权利要求3所述的方法,其特征在于,所述确定所述全局路径与所述目标狭窄通道对应的通行路线的偏差,包括:
5.根据权利要求1所述的方法,其特征在于,所述环境地图上还标注有目标狭窄通道的宽度,所述方法,还包括:
6.根据权利要求5所述的方法,其特征在于,所述控制机器人按照调整后的所述探测半径在所述目标狭窄通道内移动之后,还包括:
7.根据权利要求1-6任一项所述的方法,其特征在于,所述环境地图上还标注有狭窄通道对应的通道标识,所述确定全局路径包含的目标狭窄通道之后,还包括:
8.一种机器人过狭窄通道的装置,其特征在于,包括:
9.一种机器人,其特征在于,包括处理器和存储器,其中,所述存储器中存储有计算机程序,所述计算机程序在被处理器执行时,用以实现权利要求1-7任一项所述方法的步骤。
10.一种计算机存储介质,其特征在于,其上存储有计算机程序,所述计算机程序在被处理器执行时,用以实现权利要求1-7任一项所述方法的步骤。
技术总结
本申请涉及机器人过狭窄通道的方法、装置、机器人及存储介质,其中,方法包括:获取机器人当前区域的环境地图;在所述环境地图上,确定机器人从当前位置移动至目标位置的全局路径;确定所述全局路径包含的目标狭窄通道;控制所述机器人移动至所述目标狭窄通道对应的入口位置点;基于所述目标狭窄通道对应的通行路线,控制机器人按照巡线的方式通过所述目标狭窄通道。本申请的方法大大降低机器人与狭窄通道发生碰撞的几率,保证机器人顺利通过狭窄通道,提高机器人执行任务的效率。解决现有技术中机器人通过狭窄通道时,容易与狭窄通道发生碰撞的技术问题。
技术研发人员:张宁,周俊杰
受保护的技术使用者:苏州优智达机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!