一种无人机多平台控制方法与流程
本发明涉及无人机,更具体地说,涉及一种无人机多平台控制方法。
背景技术:
1、无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,无人机与航拍、农业、植保、快递运输等行业应用技术也愈发成熟。
2、当今森林火灾的监测与预防也有使用无人机进行巡航监测,外界和护林员可通过云端服务器和通讯终端给无人机下达指令,为护林员和巡检人员运输生活物资和农药等物品,针对森林火灾用巡航无人机为达到预防火灾的目的,需保证无人机对森林航拍图像的清晰度,因此需要低空飞行,但无人机在进行低空作业时,必然面临着高压输电线、长势高的树木以及山脉等有形的环境信息的威胁。
3、为应用于森林火灾用巡航无人机,提供一种无人机在巡航过程中能够对各种威胁的障碍物进行及时规避,同时在多个平台下达的命令指令冲突时做出最优航线判断的方法是至关重要的。
技术实现思路
1、1.要解决的技术问题
2、针对现有技术中存在的问题,本发明的目的在于提供一种无人机多平台控制方法,可以实现无人机在预设飞行航线途中对航拍获得的图像实时上传至云端服务器,通过云端服务器对图像进行实时分析,当分析出图像内有障碍物,对障碍物进行识别和障碍物地理位置信息提取,云端服务器还会根据障碍物的三维视图对无人机的飞行航线重新规划,并在绕过飞行障碍物区域后沿原航线飞行,云端服务区将新规划的路线记录至历史飞行数据中,无人机在执行其他飞行任务经过上述地理位置时,通过自主避障模块在该处进行绕行,并在多个平台下达的命令指令冲突时,无人机根据场景分析进行飞行路径优化。
3、2.技术方案
4、为解决上述问题,本发明采用如下的技术方案。
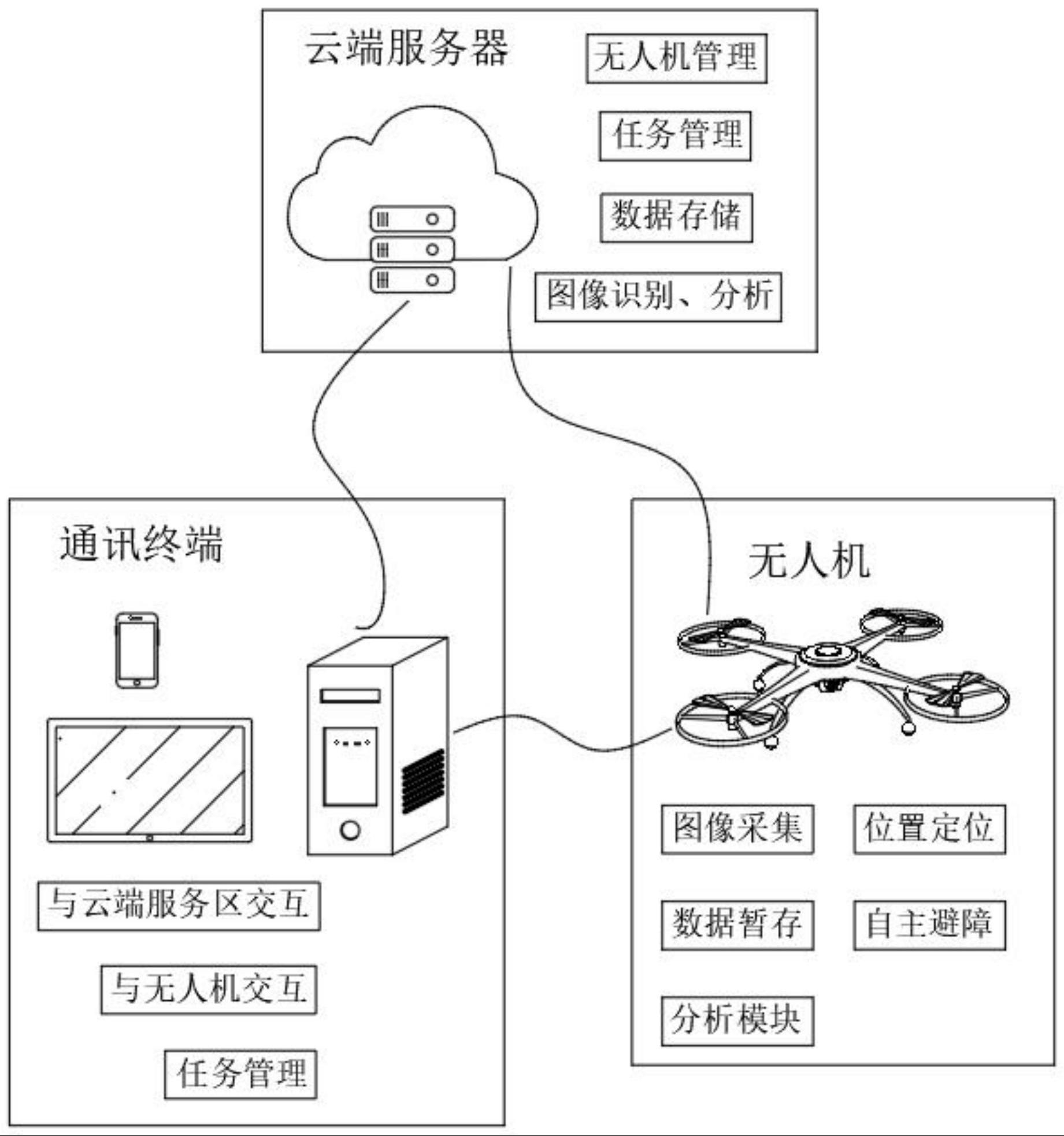
5、2.一种无人机多平台控制方法,包括无人机、云端服务器和通讯终端,无人机与云端服务器和通讯终端均通过内置软件实现互联。
6、s1、无人机用于执行云端服务器和通讯终端下达飞行任务的执行命令;
7、s2、云端服务器根据其内部数据储存的历史飞行数据对无人机当前位置与任务位置预设飞行航线,无人机根据该航线执行飞行任务;
8、s3、无人机在预设飞行航线途中对航拍获得的图像实时上传至云端服务器;
9、s4、云端服务器对图像进行实时分析,当分析出图像内有障碍物,对障碍物进行识别和障碍物地理位置信息提取,并判断无人机按预设航线飞行是否会与障碍物进行碰撞,若无人机无法进行避障时,对无人机发送紧急悬停指令;
10、s5、云端服务器根据障碍物的三维视图对无人机的飞行航线重新规划,并在绕过飞行障碍物区域后沿原航线飞行;
11、s6、云端服务区将新规划的路线记录至历史飞行数据中,无人机在执行其他飞行任务经过上述地理位置时,通过自主避障模块在该处进行绕行;
12、s7、无人机在后续飞行途中,若云端服务器再次识别到有障碍物,且无人机的预设航线无法自主避障时,则重复布置步骤s3-5,直至完成飞行任务。
13、进一步的,通讯终端包括但不限于与无人机通过软件连接的手机或无人机遥控装置。
14、进一步的,无人机根据场景分析进行飞行路径优化,其飞行路径执行优先级由高至低为安全性和紧急性,安全性的评判标准为在预设航线上无人机优先执行自主避障路线。
15、进一步的,步骤s2中,在满足安全性的前提下,若云端服务器与通讯终端下达的飞行命令指令存在冲突时,云端服务区可分析多个设备下达冲突命令的紧急性,紧急性的评判标准由无人机内置的分析模块决定,分析模块包括电量分析单元、重要性分析单元、行程路线分析单元,无人机结合上述三种分析单元进行任务优先级处理分析,分析结束后,云端服务器与通讯终端的内置软件将进行弹窗,人员可在此弹窗上选择无人机要优先执行的飞行任务,若人员未选择优先执行的操作,无人机在默认状态下按照紧急性从高至低方式进行处理。
16、进一步的,电量分析单元的评判标准为无人机是否具有完成执行两地飞行任务并返回地面站的电量,若电量足够,则按照优先满足重要性分析、再满足行程路线分析的情况下继续执行行飞行任务;若电量分析为只满足执行一项任务并保留返回地面站的电量,则优先执行可该任务并在该任务完成后立即返回地面站进行充电;若无人机剩余电量不足任意一项飞行任务时,可选择以最短行程返回地面站,或在附近有巡检人员,且巡检人员随身佩戴有储能电池的情况下,可飞行至巡检人员附近,对储能电池进行即时更换,再继续执行飞行命令。
17、进一步的,重要性分析单元的评判标准为无人机执行任务时任务的重要性,如优先执行森林防火巡检、后执行农药运输作业。
18、进一步的,行程路线分析单元的评判标准为以无人机所处位置为中心,优先执行行程路径更短,再执行行程路线更长的飞行任务,若人员未选择优先执行的操作,默认为无人机优先执行路径更短的任务。
19、进一步的,无人机在执行任务后的返途过程中,若云端服务器再次识别到有障碍物,且无人机的预设航线无法自主避障时,则重复布置步骤s3-5,直至返回地面站。
20、3.有益效果
21、相比于现有技术,本发明的优点在于:
22、(1)本方案可以实现无人机在预设飞行航线途中对航拍获得的图像实时上传至云端服务器,通过云端服务器对图像进行实时分析,当分析出图像内有障碍物,对障碍物进行识别和障碍物地理位置信息提取,云端服务器还会根据障碍物的三维视图对无人机的飞行航线重新规划,并在绕过飞行障碍物区域后沿原航线飞行,云端服务区将新规划的路线记录至历史飞行数据中,无人机在执行其他飞行任务经过上述地理位置时,通过自主避障模块在该处进行绕行,并在多个平台下达的命令指令冲突时,无人机根据场景分析进行飞行路径优化。。
技术特征:
1.一种无人机多平台控制方法,包括无人机、云端服务器和通讯终端,无人机与云端服务器和通讯终端均通过内置软件实现互联,其特征在于:
2.根据权利要求1的一种无人机多平台控制方法,其特征在于:通讯终端包括但不限于与无人机通过软件连接的手机或无人机遥控装置。
3.根据权利要求1的一种无人机多平台控制方法,其特征在于:无人机根据场景分析进行飞行路径优化,其飞行路径执行优先级由高至低为安全性和紧急性,安全性的评判标准为在预设航线上无人机优先执行自主避障路线。
4.根据权利要求3的一种无人机多平台控制方法,其特征在于:步骤s2中,在满足安全性的前提下,若云端服务器与通讯终端下达的飞行命令指令存在冲突时,云端服务区可分析多个设备下达冲突命令的紧急性,紧急性的评判标准由无人机内置的分析模块决定,分析模块包括电量分析单元、重要性分析单元、行程路线分析单元,无人机结合上述三种分析单元进行任务优先级处理分析,分析结束后,云端服务器与通讯终端的内置软件将进行弹窗,人员可在此弹窗上选择无人机要优先执行的飞行任务,若人员未选择优先执行的操作,无人机在默认状态下按照紧急性从高至低方式进行处理。
5.根据权利要求4的一种无人机多平台控制方法,其特征在于:电量分析单元的评判标准为无人机是否具有完成执行两地飞行任务并返回地面站的电量,若电量足够,则按照优先满足重要性分析、再满足行程路线分析的情况下继续执行行飞行任务;若电量分析为只满足执行一项任务并保留返回地面站的电量,则优先执行可该任务并在该任务完成后立即返回地面站进行充电;若无人机剩余电量不足任意一项飞行任务时,可选择以最短行程返回地面站,或在附近有巡检人员,且巡检人员随身佩戴有储能电池的情况下,可飞行至巡检人员附近,对储能电池进行即时更换,再继续执行飞行命令。
6.根据权利要求5的一种无人机多平台控制方法,其特征在于:重要性分析单元的评判标准为无人机执行任务时任务的重要性,如优先执行森林防火巡检、后执行农药运输作业。
7.根据权利要求6的一种无人机多平台控制方法,其特征在于:行程路线分析单元的评判标准为以无人机所处位置为中心,优先执行行程路径更短,再执行行程路线更长的飞行任务,若人员未选择优先执行的操作,默认为无人机优先执行路径更短的任务。
8.根据权利要求7的一种无人机多平台控制方法,其特征在于:无人机在执行任务后的返途过程中,若云端服务器再次识别到有障碍物,且无人机的预设航线无法自主避障时,则重复布置步骤s3-5,直至返回地面站。
技术总结
本发明公开了一种无人机多平台控制方法,属于无人机技术领域,一种无人机多平台控制方法,可以实现无人机在预设飞行航线途中对航拍获得的图像实时上传至云端服务器,通过云端服务器对图像进行实时分析,当分析出图像内有障碍物,对障碍物进行识别和障碍物地理位置信息提取,云端服务器还会根据障碍物的三维视图对无人机的飞行航线重新规划,并在绕过飞行障碍物区域后沿原航线飞行,云端服务区将新规划的路线记录至历史飞行数据中,无人机在执行其他飞行任务经过上述地理位置时,通过自主避障模块在该处进行绕行,并在多个平台下达的命令指令冲突时,无人机根据场景分析进行飞行路径优化。
技术研发人员:杨明,车铭基,李茂环
受保护的技术使用者:南京迪锐科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!