一种避障系统及控制方法与流程
本申请涉及机器人避障领域,尤其涉及一种避障系统及控制方法。
背景技术:
1、目前,电力巡检机器人在巡检过程中采用超声波测距的方式,用于机器人的远距离超声停障,对于路面凸起的高位和低矮障碍物的识别警界范围为50~100cm,在该范围内出现障碍物时机器人开始减速,当障碍物与机器人距离小于50cm后进入超声停障区域,机器人随即停止运动。但超声传感器仅能监测到路面凸起,而对于路面凹陷以及电缆沟槽等情况时无法有效勘测,导致机器人跌落,中断巡检作业,甚至出现设备损坏等情况。
技术实现思路
1、为了解决这一技术问题,本申请提供了一种避障系统及方法,该系统及控制方法能够有效勘测路面凹陷以及沟槽等情况。
2、为实现本申请的目的,本申请通过以下技术方案实现:
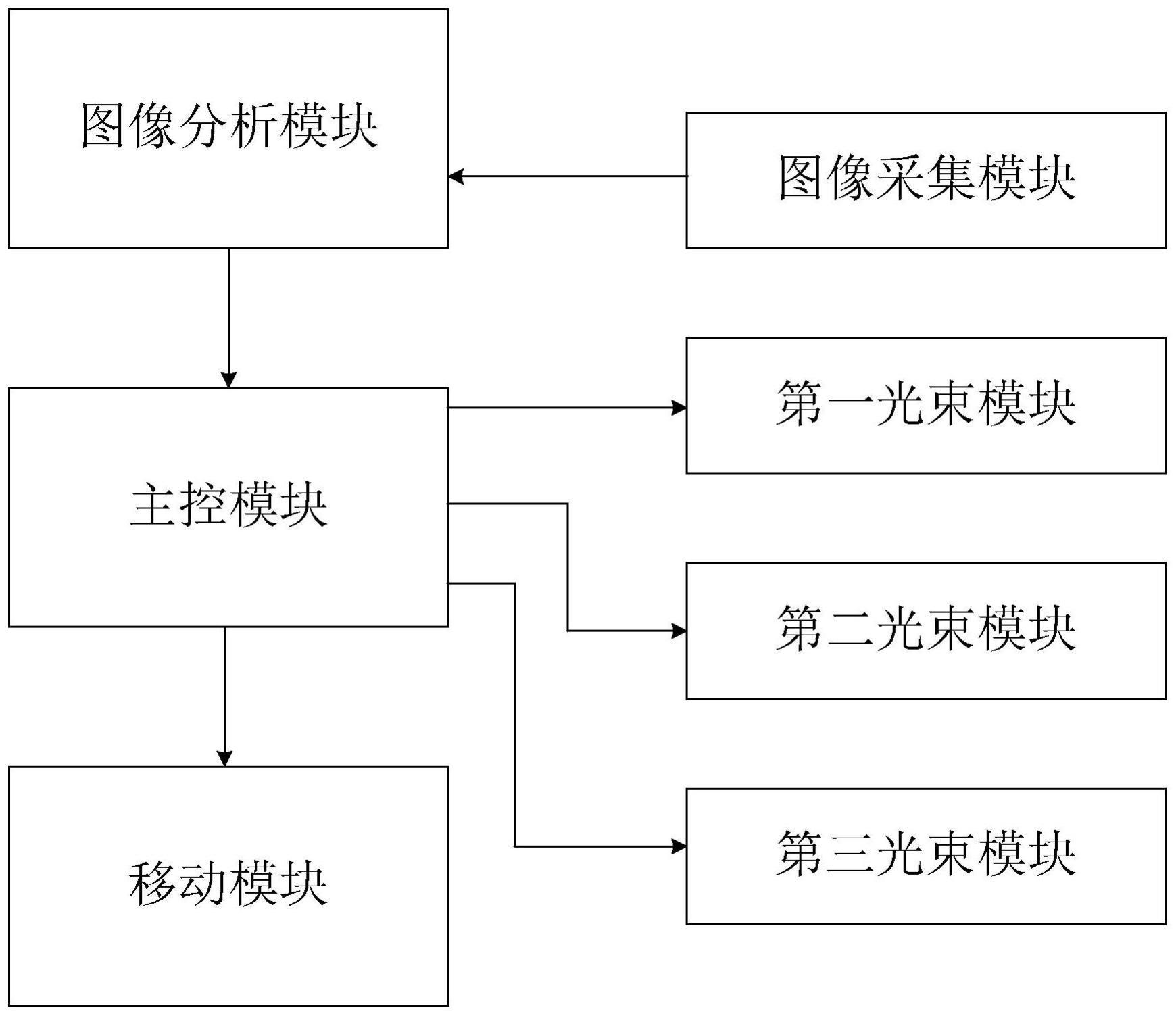
3、第一方面,本申请提供一种避障系统,包括:设有移动模块的移动体、发射光斑的光束模块、检测光斑光强度生成亮度比值的检测模块与根据所述检测模块生成的亮度比值控制所述移动模块运动状态的主控模块;
4、所述光束模块设置在所述移动体的外壁,所述外壁包括所述移动体面向前进方向的外壁;所述检测模块包括:图像采集元件与图像分析元件;所述图像采集元件设置在所述移动体的外壁顶部,所述图像分析元件设置在所述移动体内部并与所述图像采集元件电连接;所述控制器设置在所述移动体的内部,并与所述光束模块、检测模块、移动模块电连接。
5、可选的,所述检测模块还用于检测光斑直径。
6、在一种可能的实现方式中,所述光束模块包括:第一光束元件、第二光束元件与第三光束元件,所述第一光束元件用于发射光束在水平地面上形成第一待测基底光斑,所述第二光束元件位于第一光束元件下方,用于发射光束在水平地面上形成第二待测基底光斑,所述第一待测基底光斑与所述第二待测基底光斑叠加形成待测光斑,所述第三光束元件位于第二光束元件下方,用于发射光束在水平地面上形成基准光斑,所述基准光斑位于所述待测光斑与所述移动体之间;所述图像采集元件用于采集所述待测光斑与所述基准光斑的光强度信息,所述图像分析元件用于分析所述光强度信息生成亮度比值。
7、可选的,所述第一光束元件、第二光束元件与第三光束元件以同样间隔设置,所述第一光束元件的光束以与水平地面30°夹角入射,所述第二光束元件与所述第三光束元件的光束以与水平地面45°夹角入射。
8、在一种可能的实现方式中,所述移动模块为轮式移动机构或履带式移动机构。
9、在一种可能的实现方式中,所述光束模块为红色激光模组,所述红色激光模组功率为10mw,所述发射光束波长为650nm,所述待测光斑与基准光斑的直径为20mm。
10、在一种可能的实现方式中,所述图像采集元件为摄像头。
11、在一种可能的实现方式中,所述避障系统还包括告警模块,所述告警模块用于发出告警提示音;所述主控模块还用于根据所述亮度比值控制所述告警模块启闭。
12、可选的,所述告警模块还用于发出告警闪光。
13、在一种可能的实现方式中,所述主控模块还用于控制所述移动体的移动路线。
14、在一种可能的实现方式中,所述移动体为移动机器人。
15、可选的,所述移动体为电力巡检机器人。
16、第二方面,本申请提供一种用于上述避障系统的控制方法,包括:
17、主控模块指示移动模块运动与光束模块开启;
18、图像采集模块采集基准光斑与待测光斑的光强度信息;
19、图像分析模块通过计算待测光斑光强度与基准光斑光强度的比值得到亮度比值,所述亮度比值小于1时预测前方有凹陷地势,所述亮度比值大于1时预测前方有凸起地势;
20、所述主控模块在检测到所述亮度比值在第一预设周期内的变化幅度大20%时,控制移动模块停止,所述第一预设周期小于所述基准光斑与待测光斑的间隔距离除以移动体的移动速度。
21、可选的,所述第一预设周期为10s。
22、在一种可能的实现方式中,所述方法还包括:
23、所述主控模块在检测到所述亮度比值在第一预设周期内的变化幅度大20%时,控制所述告警模块开启发出告警提示音;
24、若所述告警模块在第二预设周期内未关闭,则所述主控模块指示所述移动模块带动移动体返回充电仓。
25、可选的,所述第二预设周期为20min,所述移动体返回充电仓后关闭告警模块。
26、本申请提供的技术方案的技术效果如下:
27、本申请所述的一种避障系统及控制方法,能够有效检测行进方向上路面的凹陷情况,若待测光斑光强度与基准光斑光强度的比值在第一预设周期内变化幅度大于20%,则判定前方有障碍,移动模块停止运动,开启告警模块进行声光告警,若在第二预设周期内告警模块未关闭,则移动模块带动移动体返仓充电,该避障系统及控制方法能够有效检测行进方向上路面的凹陷情况,解决无法有效勘探路面凹陷的问题,避免装载该系统的移动体跌落。
技术特征:
1.一种避障系统,其特征在于,包括:
2.根据权利要求1所述的避障系统,其特征在于,所述光束模块包括:第一光束元件、第二光束元件与第三光束元件,所述第一光束元件用于发射光束在水平地面上形成第一待测基底光斑,所述第二光束元件位于第一光束元件下方,用于发射光束在水平地面上形成第二待测基底光斑,所述第一待测基底光斑与所述第二待测基底光斑叠加形成待测光斑,所述第三光束元件位于第二光束元件下方,用于发射光束在水平地面上形成基准光斑,所述基准光斑位于所述待测光斑与所述移动体之间,且与所述待测光斑的光强度相等;
3.根据权利要求1所述的避障系统,其特征在于,所述移动模块为轮式移动机构。
4.根据权利要求2所述的避障系统,其特征在于,所述光束模块为红色激光模组,所述红色激光模组功率为10mw,所述发射光束波长为650nm,所述待测光斑与基准光斑的直径为20mm。
5.根据权利要求1所述的避障系统,其特征在于,所述图像采集元件为摄像头。
6.根据权利要求1所述的避障系统,其特征在于,还包括告警模块,所述告警模块用于发出告警提示音;所述主控模块还用于根据所述亮度比值控制所述告警模块启闭。
7.根据权利要求1所述的避障系统,其特征在于,所述主控模块还用于控制所述移动体的移动路线。
8.根据权利要求1-7中任一项所述的避障系统,其特征在于,所述移动体为移动机器人。
9.一种基于权利要求1-8所述任一项所述的避障系统的避障控制方法,其特征在于,包括:
10.根据权利要求9所述的控制方法,其特征在于,所述方法还包括:
技术总结
本申请提供了本申请提供一种避障系统及控制方法,包括:设有移动模块的移动体、发射光斑的光束模块、检测光斑光强度生成亮度比值的检测模块与根据所述检测模块生成的亮度比值控制所述移动模块运动状态的主控模块,采用本申请提供避障系统及控制方法能够有效检测行进方向上路面的凹陷情况,解决无法有效勘探路面凹陷的问题,避免装载该系统的移动体跌落。
技术研发人员:李天录,张英旭,葛晓达,易里坤,赵地,滑兴
受保护的技术使用者:华能清能通榆电力有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!