一种基于运动控制器电子凸轮位置曲线优化方法与流程
本发明涉及一种,尤其是涉及一种基于运动控制器电子凸轮位置曲线优化方法。
背景技术:
1、近些年来,codesys为广大运动控制器厂商提供了开放式、模块化符合iec61131-3国际标准的平台,越来越多的厂家基于该平台进行控制器的开发。通用控制器平台提供了电子凸轮功能,该功能广泛应用于包装印刷等行业当中。在这些行业当中,需要多轴联动、实时同步等功能,传统设备采用机械凸轮,但由于机械凸轮机构复杂,维护不便等,在很多场合使用操作不便。电子凸轮功能,可以完美解决机械凸轮存在的相应问题。
2、但目前电子凸轮关键点位置曲线生成当中只提供线性和五次多项式两种算法的生成方式,当在如追剪等相关场景进行应用时,线性算法会导致加速度冲击很大,导致设置在运行过程当中出现较大的震动;在使用五次多项式算法时,会存在目标位置超调的问题,影响位置控制的精度。因此,在很多场合下现有通用算法无法满足实际工艺的需求,若要满足相应工艺需求,需要既有的关键点之前增加大量辅助关键点,以此来满足相应的工艺需求,但是该方案计算量大,操作不便,实际应用当中很难实现。
3、专利cn201610304902《电子凸轮控制装置及其电子凸轮曲线生成方法》只描述了从轴位置曲线的生成方式,无法做到对速度加速度进行优化,减小系统的柔性冲击;专利cn201910044807《一种电子凸轮曲线生成方法及相关装置》主要的建立了使用三角函数和一阶/二阶齐次方程来构建位置曲线,算法复杂度虽然下降了,但却无法解决在关键点附近的加速度突变导致的冲击问题;专利cn201310740913《一种电子凸轮曲线生成方法》使用三次样条曲线的方式生成凸轮曲线,但并未考虑生成曲线的位置超调和系统柔性冲击的问题。
4、如图1所示,通用五次多项式常被用于产生电子凸轮曲线的算法,故以通用五次多项式算法为例,其运动规律图(推程段);
5、其运动表达式如下:
6、s=c0+c1t+c2t2+c3t3+c4t4+c5t5
7、
8、
9、
10、s、v、a、j分别为位置、速度、加速度和加加速度。在加速段边界条件t=0时,s=0,v=0,a=0,当t=t1时,s=h,v=0,a=0,则可以得到:
11、
12、
13、
14、
15、t∈[0,t1]
16、然而,简单应用五次多项式产生的电子凸轮曲线往往会在位置上存在超调,或者存在速度或加速度的冲击,使得从轴实际轨迹不连续。
17、因此如何来解决现有技术中的电子凸轮曲线出现位置超调、速度或加速度存在冲击的问题,成为需要解决的技术问题。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于运动控制器电子凸轮位置曲线优化方法。
2、本发明的目的可以通过以下技术方案来实现:
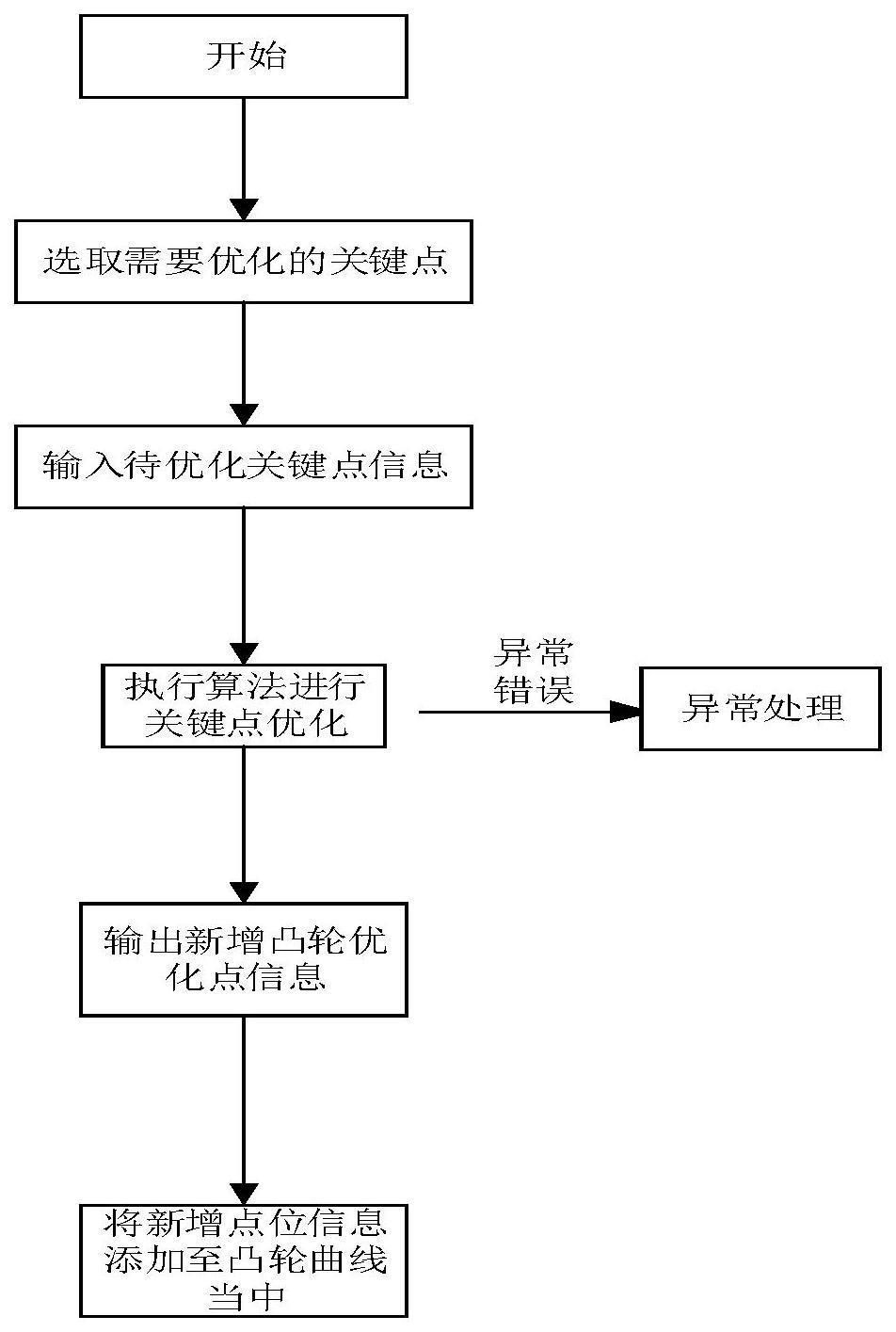
3、根据本发明的一个方面,提供了一种基于运动控制器电子凸轮位置曲线优化方法,该方法包括以下步骤:
4、1)选择需要优化的电子凸轮曲线段,并选取需要优化的关键点;
5、2)输入待优化关键点信息;
6、3)采用优化五次多项式算法进行关键点优化;
7、4)输出新增凸轮优化后的关键点;
8、5)将所有新增凸轮优化后的关键点添加到原有的凸轮曲线当中,构成新的优化后的曲线。
9、作为优选的技术方案,所述的选择需要优化的电子凸轮曲线段具体为:
10、选取运行中需要从轴进行匀速运行的电子凸轮曲线段。
11、作为优选的技术方案,所述的选取需要优化的关键点为需要优化的电子凸轮曲线段的起点和末点。
12、作为优选的技术方案,所述的输入待优化关键点信息包括关键点处的主轴位置、从轴位置、从轴速度和从轴加速度。
13、作为优选的技术方案,所述的优化五次多项式算法具体为:
14、对于推程优化曲线,得到优化后加速段运动方程:
15、
16、
17、
18、
19、t∈[0,t1]
20、优化后匀速段运动方程:
21、
22、
23、
24、t∈[t1,t2]
25、优化后减速段运动方程:
26、
27、
28、
29、
30、t∈[t-t2,t]
31、其中s、v、a、j分别为位置、速度、加速度和加加速度,t为所选曲线主轴总行程,t为主轴位置自变量,t为主轴位置自变量,t1为加加速段运动执行时间,t2为减加速段执行时间,h1为加加速段运行距离,h2为减加速段运行距离,h为加加速,匀加速,减加速段运行距离。
32、作为优选的技术方案,运行所述的采用优化五次多项式算法后,即可获得在所选首末点内优化后的新增关键点信息。
33、作为优选的技术方案,该方法使用双谐波和逆双谐波生成的运动曲线对原凸轮曲线进行优化。
34、作为优选的技术方案,所述双谐波运动方程推导如下:
35、
36、
37、
38、
39、t∈[0,t]
40、其中s、v、a、j分别为位置、速度、加速度和加加速度,t为所选曲线主轴总行程,t为主轴位置自变量,h为双谐波或者逆双谐波加速或者减速段的行程,π为弧度制与角度制转换常数,3.1415926。
41、作为优选的技术方案,所述逆双谐波推导出运动公式方程具体如下:
42、
43、
44、
45、
46、t∈[0,t]
47、其中s、v、a、j分别为位置、速度、加速度和加加速度,t为所选曲线主轴总行程,t为主轴位置自变量,h为双谐波或者逆双谐波加速或者减速段的行程。
48、作为优选的技术方案,该方法选定其他需要进行优化的凸轮曲线段,在五次多项式曲线段当中,每两点间的位置关系都是符合某一个五次多项式的表达,现将首末点信息提取,并将其输入到步骤3)中的优化算法当中,执行优化算法对该段进行优化。
49、与现有技术相比,本发明具有以下优点:
50、1)本发明提供的方法可以在电子凸轮关键点处直接连接且无加速度冲击;
51、2)本发明方法在凸轮位置关键点处不存在超调且有较好的加速响应。
技术特征:
1.一种基于运动控制器电子凸轮位置曲线优化方法,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述的一种基于运动控制器电子凸轮位置曲线优化方法,其特征在于,所述的选择需要优化的电子凸轮曲线段具体为:
3.根据权利要求1所述的一种基于运动控制器电子凸轮位置曲线优化方法,其特征在于,所述的选取需要优化的关键点为需要优化的电子凸轮曲线段的起点和末点。
4.根据权利要求1所述的一种基于运动控制器电子凸轮位置曲线优化方法,其特征在于,所述的输入待优化关键点信息包括关键点处的主轴位置、从轴位置、从轴速度和从轴加速度。
5.根据权利要求1所述的一种基于运动控制器电子凸轮位置曲线优化方法,其特征在于,所述的优化五次多项式算法具体为:
6.根据权利要求1所述的一种基于运动控制器电子凸轮位置曲线优化方法,其特征在于,运行所述的采用优化五次多项式算法后,即可获得在所选首末点内优化后的新增关键点信息。
7.根据权利要求1所述的一种基于运动控制器电子凸轮位置曲线优化方法,其特征在于,该方法使用双谐波和逆双谐波生成的运动曲线对原凸轮曲线进行优化。
8.根据权利要求7所述的一种基于运动控制器电子凸轮位置曲线优化方法,其特征在于,所述双谐波运动方程推导如下:
9.根据权利要求7所述的一种基于运动控制器电子凸轮位置曲线优化方法,其特征在于,所述逆双谐波推导出运动公式方程具体如下:
10.根据权利要求1所述的一种基于运动控制器电子凸轮位置曲线优化方法,其特征在于,该方法选定其他需要进行优化的凸轮曲线段,在五次多项式曲线段当中,每两点间的位置关系都是符合某一个五次多项式的表达,现将首末点信息提取,并将其输入到步骤3)中的优化算法当中,执行优化算法对该段进行优化。
技术总结
本发明涉及一种基于运动控制器电子凸轮位置曲线优化方法,该方法包括以下步骤:1)选择需要优化的电子凸轮曲线段,并选取需要优化的关键点;2)输入待优化关键点信息;3)采用优化五次多项式算法进行关键点优化;4)输出新增凸轮优化后的关键点;5)将所有新增凸轮优化后的关键点添加到原有的凸轮曲线当中,构成新的优化后的曲线。与现有技术相比,本发明具有可以在电子凸轮关键点处直接连接且无加速度冲击等优点。
技术研发人员:徐凯,袁震寰,罗爱顺
受保护的技术使用者:上海安浦鸣志自动化设备有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!