机器人的脱困方法、装置、终端设备和可读存储介质与流程
本申请属于机器人,尤其涉及一种机器人的脱困方法、装置、终端设备和可读存储介质。
背景技术:
1、机器人脱困控制是辅助机器人顺利完成任务的重要研究方向,相关技术中常通过激光雷达或其他传感器扫描的数据导航离开受困区域。但是,机器人在执行任务时,有时会钻到床下,或者钻进飘动的窗帘后,被垂下的床单或窗帘遮挡激光雷达或其他传感器,导致难以导航离开受困区域,因此可靠性较低。
技术实现思路
1、本申请实施例提供一种机器人的脱困方法、装置、终端设备和可读存储介质,可以解决相关技术中机器人的脱困方式可靠性不足的问题。
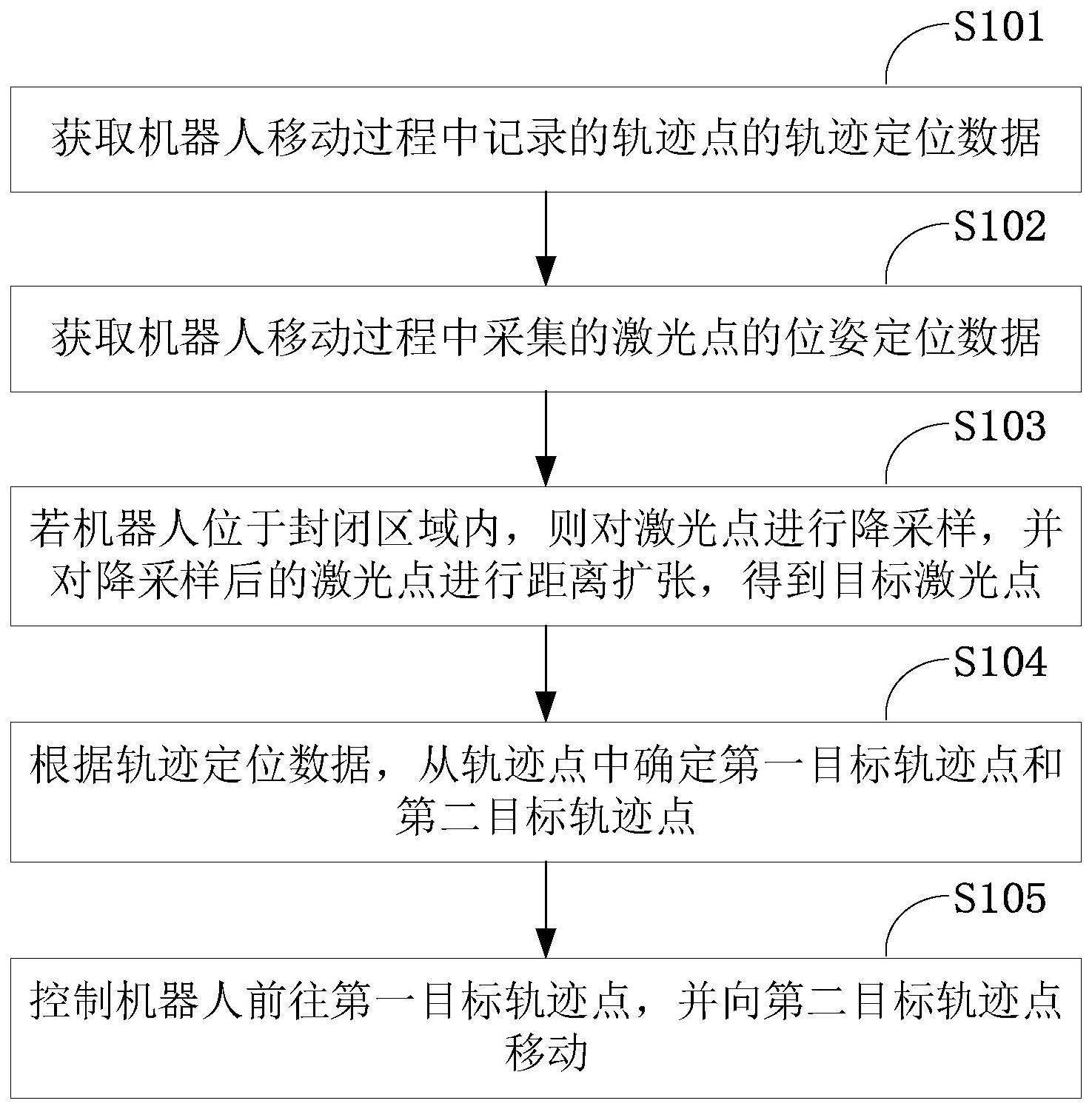
2、本申请实施例第一方面提供一种机器人的脱困方法,包括:获取机器人移动过程中记录的轨迹点的轨迹定位数据;获取所述机器人移动过程中采集的激光点的位姿定位数据;若所述机器人位于封闭区域内,则对所述激光点进行降采样,并对降采样后的激光点进行距离扩张,得到目标激光点,所述目标激光点连接形成所述机器人所在的凸多边形区域;根据所述轨迹定位数据,从所述轨迹点中确定第一目标轨迹点和第二目标轨迹点,所述第一目标轨迹点位于所述凸多边形区域之内,所述第二目标轨迹点位于所述凸多边形区域之外;控制所述机器人前往所述第一目标轨迹点,并向所述第二目标轨迹点移动。
3、本申请实施例第二方面提供的一种机器人的脱困装置,包括:轨迹定位单元,用于获取机器人移动过程中记录的轨迹点的轨迹定位数据;位姿定位单元,用于获取所述机器人移动过程中采集的激光点的位姿定位数据;激光点处理单元,用于若所述机器人位于封闭区域内,则对所述激光点进行降采样,并对降采样后的激光点进行距离扩张,得到目标激光点,所述目标激光点连接形成所述机器人所在的凸多边形区域;轨迹点处理单元,用于根据所述轨迹定位数据,从所述轨迹点中确定第一目标轨迹点和第二目标轨迹点,所述第一目标轨迹点位于所述凸多边形区域之内,所述第二目标轨迹点位于所述凸多边形区域之外;脱困控制单元,用于控制所述机器人前往所述第一目标轨迹点,并向所述第二目标轨迹点移动。
4、本申请实施例第三方面提供一种终端设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述机器人的脱困方法的步骤。
5、本申请实施例第四方面提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述机器人的脱困方法的步骤。
6、本申请实施例第五方面提供了一种计算机程序产品,当计算机程序产品在终端设备上运行时,使得终端设备执行上述第一方面中所述的机器人的脱困方法。
7、在本申请的实施方式中,通过获取机器人移动过程中记录的轨迹点的轨迹定位数据及激光点的位姿定位数据,若机器人位于封闭区域内,则对激光点进行降采样,并对降采样后的激光点进行距离扩张,得到目标激光点,其中,目标激光点连接形成机器人所在的凸多边形区域,该凸多边形区域可以包含上述封闭区域,因此根据轨迹定位数据,从轨迹点中确定凸多边形区域之内的第一目标轨迹点和凸多边形区域之外的第二目标轨迹点,控制机器人前往第一目标轨迹点,并向第二目标轨迹点移动,在激光雷达被遮挡时,仍可以给出脱困的移动方式,因此机器人脱困的可靠性较高。
技术特征:
1.一种机器人的脱困方法,其特征在于,包括:
2.如权利要求1所述的机器人的脱困方法,其特征在于,所述位姿定位数据为极坐标数据;
3.如权利要求2所述的机器人的脱困方法,其特征在于,所述将所述激光雷达数据和所述位姿数据转换为以首个采样时刻的所述激光点为原点的所述极坐标数据之后,还包括:
4.如权利要求3所述的机器人的脱困方法,其特征在于,在所述对所述激光点进行降采样之前,还包括:
5.如权利要求2所述的机器人的脱困方法,其特征在于,所述对所述激光点进行降采样,并对降采样后的激光点进行距离扩张,得到目标激光点,包括:
6.如权利要求1至5任意一项所述的机器人的脱困方法,其特征在于,所述根据所述轨迹定位数据,从所述轨迹点中确定第一目标轨迹点和第二目标轨迹点,包括:
7.如权利要求1至5任意一项所述的机器人的脱困方法,其特征在于,在所述控制所述机器人前往所述第一目标轨迹点,并向所述第二目标轨迹点移动的过程中,包括:
8.一种机器人的脱困装置,其特征在于,包括:
9.一种终端设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7任一项所述机器人的脱困方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述机器人的脱困方法的步骤。
技术总结
本申请适用于机器人技术领域,提供了一种机器人的脱困方法、装置、终端设备和可读存储介质。其中,上述机器人的脱困方法具体包括:获取机器人移动过程中记录的轨迹点的轨迹定位数据;获取机器人移动过程中采集的激光点的位姿定位数据;若机器人位于封闭区域内,则对激光点进行降采样,并对降采样后的激光点进行距离扩张,得到目标激光点,目标激光点连接形成机器人所在的凸多边形区域;根据轨迹定位数据,从轨迹点中确定第一目标轨迹点和第二目标轨迹点,第一目标轨迹点位于凸多边形区域之内,第二目标轨迹点位于凸多边形区域之外;控制机器人前往第一目标轨迹点,并向第二目标轨迹点移动。本申请的实施例可以提高机器人脱困方法的可靠性。
技术研发人员:赵勇胜,张思民,焦继超
受保护的技术使用者:深圳市优必选科技股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!