太阳能无人机飞行策略生成方法、装置、设备及存储介质
本发明涉及太阳能无人机飞行策略生成,具体涉及一种太阳能无人机飞行策略生成方法、装置、设备及存储介质。
背景技术:
1、临近空间太阳能无人机具有续航时间长、飞行高度高、使用部署灵活等特点,是国内外临近空间低速飞行器研发的重点方向。然而根据当前国内外太阳能电池和储能电池的发展水平,让太阳能无人机实现数周乃至数月的长时间续航依然充满挑战,达成这一目标仍有赖于飞机各个分系统的通力合作,其中通过优化飞行航迹和飞行姿态,在实现太阳能量最大峰值跟踪的同时保证较低的飞行能耗,使无人机能够最大化净能量收益,对提升其长时间续航能力有着至关重要的作用。
2、目前,国内外学者对太阳能无人机飞行轨迹和能量管理策略优化开展了卓越的研究工作,陆续将粒子群、模型预测控制、高斯伪谱、蚁群算法等应用于无人机的航迹优化和能量管理优化领域。然而大部分研究仍然基于传统的制导—姿态控制架构,存在以下问题。
3、现有技术通常在离线过程中完成整个飞行轨迹优化,面对空中未知情况时依然使用固定航迹,无法满足基于不确定飞行环境的自适应导航要求。此外,即使现有技术在无人机飞行过程中采用飞行信息和理想环境模型规化新航迹的方法,但是该方法容易受到计算效率的限制,无法满足实时输出飞行控制指令的要求。且现有技术的研究场景普遍聚焦于24小时内的飞行策略,针对大时空跨度为背景的飞行策略生成机制研究较少。且传统飞行控制架构没有考虑制导控制、姿态控制与净能量收益三者之间的强耦合关系,严重制约了太阳能无人机的长时间续航能力。
技术实现思路
1、本发明提供一种太阳能无人机飞行策略生成方法、装置、电子设备及计算机可读存储介质,用于至少部分解决上述技术问题之一。
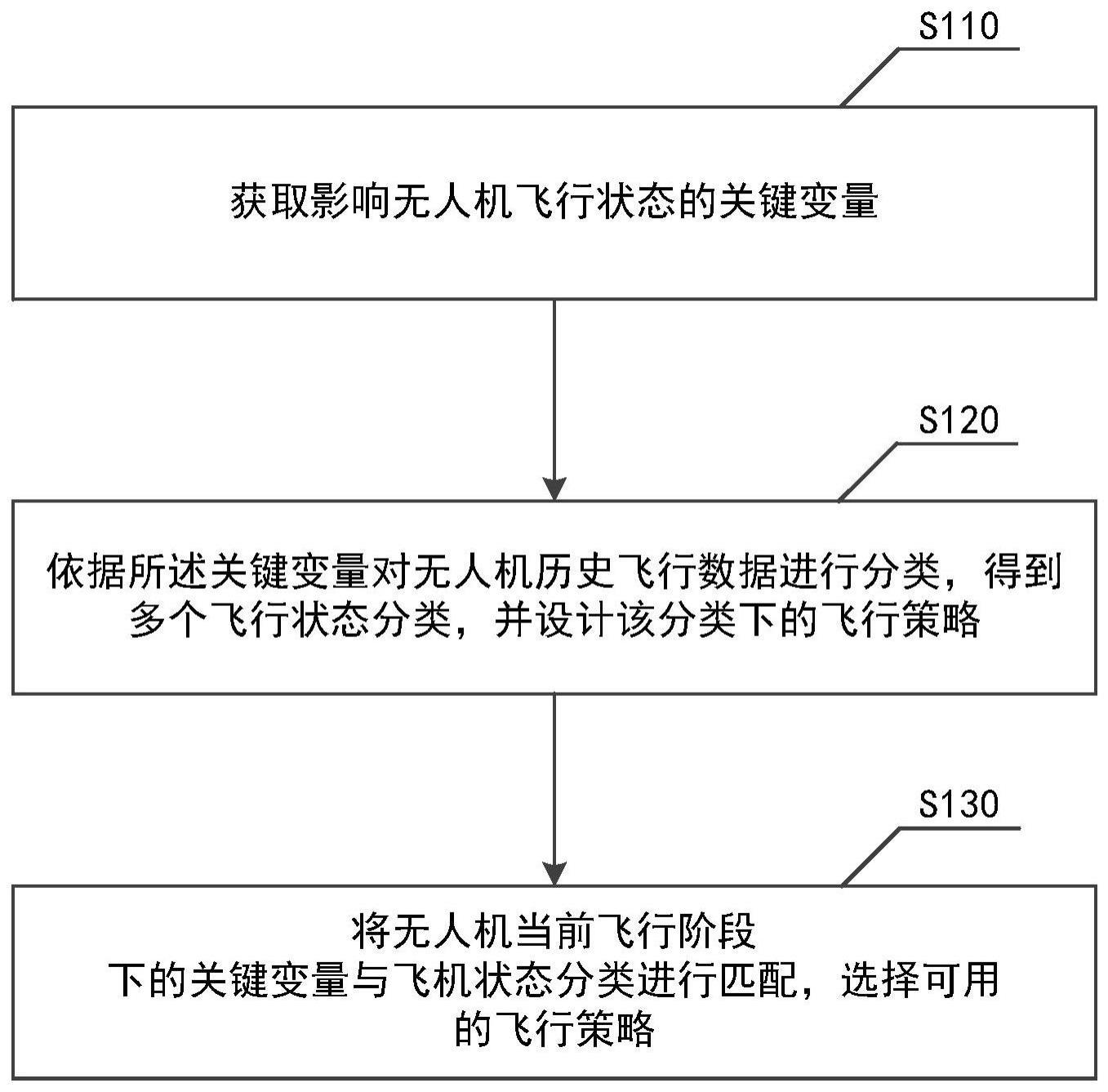
2、本发明第一方面提供一种太阳能无人机飞行策略生成方法,包括:获取影响无人机飞行状态的关键变量;依据关键变量对无人机历史飞行数据进行分类,得到多个飞行状态分类,并设计该分类下的飞行策略;将无人机当前飞行阶段下的关键变量与飞机状态分类进行匹配,选择可用的飞行策略。
3、可选地,获取无人机运动状态参数,运动状态参数包括无人机当前位置、姿态、角速度、加速度、储能电池状态以及作动器状态;获取无人机所处环境参数,环境参数包括温度、压强、空气密度、太阳辐射参数;根据运动状态参数和环境参数进行灵敏度分析,获得影响无人机飞行状态的关键变量;其中,关键变量包括太阳能辐射能量、无人机自身重力势能和无人机储能电池剩余电量。
4、可选地,每一飞行状态分类均存在一个聚类中心,聚类中心为该飞行状态分类中最具有代表性的关键变量组合,通过计算聚类中心与其余数据关键变量间的距离划定飞行状态分类。
5、可选地,将无人机当前飞行阶段的关键变量与飞机状态分类进行匹配,包括:将无人机的完整飞行过程分解成多个飞行状态在时序上的组合;提取飞行阶段的关键变量,利用关键变量进行飞行状态分类匹配,根据飞行状态分类匹配选择相应飞行策略。
6、可选地,利用关键变量进行飞行状态分类匹配,包括:计算当前关键变量与每一飞行状态分类聚类中心之间的距离,当距离符合该聚类中心的范围,则匹配成功。
7、可选地,通过基于选项框架原理的分层强化学习进行关键变量与飞行状态分类的匹配。
8、可选地,飞行策略包括长期规划和短期策略;长期规划为无人机整个航程的飞行策略,短期策略为将无人机完整飞行过程分解成多个飞行状态后每一飞行状态所对应的飞行策略。
9、本发明第二方面提供一种太阳能无人机飞行策略生成装置,包括:提取模块,用于获取影响无人机飞行状态的关键变量;其中,关键变量包括太阳能辐射能量、无人机自身重力势能和无人机储能电池剩余电量;分类模块,用于依据关键变量对无人机历史飞行数据进行分类,得到多个飞行状态分类,并设计该分类下的飞行策略;匹配模块,用于将无人机当前飞行阶段下的关键变量与飞机状态分类进行匹配,选择可用的飞行策略。
10、本发明第三方面提供一种电子设备,其特征在于,包括:一个或多个相同或不同种类的处理器;存储器,用于存储一个或多个程序,其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现上述任一项所述的方法。
11、本发明第四方面提供一种计算机可读存储介质,其特征在于,其上存储有可执行指令,该指令被处理器执行时使处理器实现上述任一项所述的方法。
12、本发明实施例,通过获取影响无人机飞行状态的关键变量,并依据关键变量对无人机历史飞行数据进行分类,得到多个飞行状态分类,并将无人机当前飞行阶段下的关键变量与飞机状态分类进行匹配,建立面向长期规划和短期策略的双层逻辑判断结构,使无人机具备快速自适应生成飞行策略的能力;并在太阳能无人机各子系统的互联关系的基础上,实现了飞行控制系统中制导、姿态控制、能量的耦合,有效提高了大时空跨度下临近空间太阳能无人机的决策能力和续航能力。
13、本发明的其他特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种太阳能无人机飞行策略生成方法,包括:
2.根据权利要求1所述的方法,其中,所述获取影响无人机飞行运动状态的关键变量,包括:
3.根据权利要求1所述的方法,其中,所述每一飞行状态分类均存在一个聚类中心,所述聚类中心为该飞行状态分类中最具有代表性的关键变量组合,通过计算所述聚类中心与其余数据关键变量间的距离划定所述飞行状态分类。
4.根据权利要求1所述的方法,其中,将无人机当前飞行阶段的关键变量与飞机状态分类进行匹配,包括:
5.根据权利要求4所述的方法,其中,所述利用所述关键变量进行飞行状态分类匹配,包括:
6.根据权利要求4所述的方法,其中,通过基于选项框架原理的分层强化学习进行关键变量与飞行状态分类的匹配。
7.根据权利要求1所述的方法,其中,所述飞行策略包括长期规划和短期策略;长期规划为所述无人机整个航程的飞行策略,短期策略为将所述无人机完整飞行过程分解成多个飞行状态后每一飞行状态所对应的飞行策略。
8.一种太阳能无人机智能化飞行策略生成装置,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,其上存储有可执行指令,该指令被处理器执行时使处理器实现权利要求1至7中任一项所述的方法。
技术总结
本发明提供一种太阳能无人机飞行策略生成方法,包括:获取影响无人机飞行状态的关键变量;依据关键变量对无人机历史飞行数据进行分类,得到多个飞行状态分类,并设计该分类下的飞行策略;将无人机当前飞行阶段下的关键变量与飞机状态分类进行匹配,选择可用的飞行策略。本发明通过获取影响无人机飞行状态的关键变量,并依据关键变量对无人机历史飞行数据进行分类,得到多个飞行状态分类,并将无人机当前飞行状态下的关键变量与飞机状态分类进行匹配,建立面向长期规划和短期策略的双层逻辑判断结构,使无人机具备快速自适应生成飞行策略的能力,有效提高了大时空跨度背景下临近空间太阳能无人机的决策能力和续航能力。
技术研发人员:吴迪,倪文俊,张子健,刘宇超
受保护的技术使用者:中国科学院工程热物理研究所
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!