一种具有千兆以太网接口的协作机器人系统的制作方法
本技术涉及机器人通信,尤其涉及一种具有千兆以太网接口的协作机器人系统。
背景技术:
1、现有机器人末端工具只有电源或io接口或串行通信接口,通信速率较低。协作机器人一般采用内部走线,控制器和关节、工具连接示意图如图1所示。由于关节内部空间限制,线缆一般包含两组线缆,一组供电线缆,用来给各关节提供动力,另一组为通信线缆用于各关节的运动控制及末端的工具输入和输出。现有协作机器人内部基本无法增加独立线缆。即使增加了线缆,长时间运行,其可靠性会降低。外置线缆则不适用某些特殊场景,并且由于线缆固定会限制机器人运动空间。
2、现有机器人内部ethercat通信带宽可达百兆,但是大部分感知模块需求通信带宽更高甚至千兆,并且ethercat通信协议基本无法适配。
技术实现思路
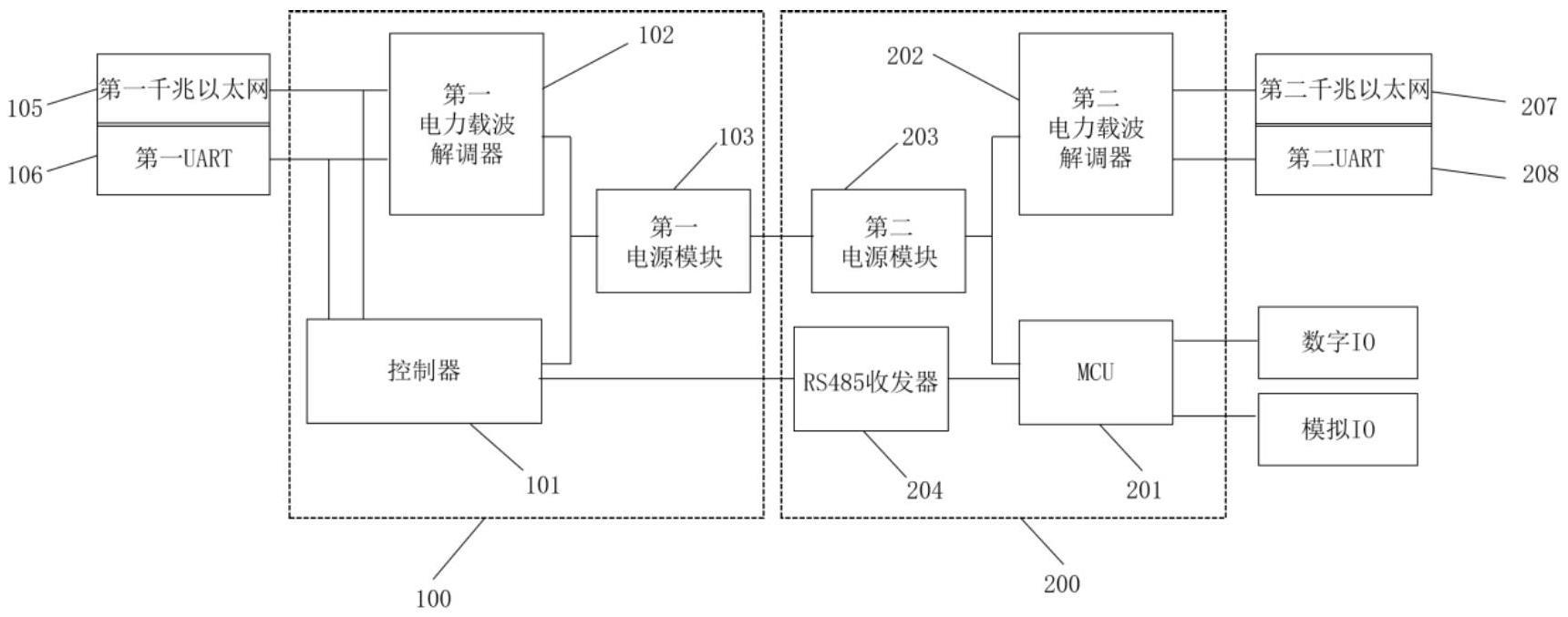
1、为了解决上述问题,本实用新型提供了一种具有千兆以太网接口的协作机器人系统,包括电力载波模块,所述电力载波模块包括第一电力载波模块和第二电力载波模块;所述第一电力载波模块对外连接有第一千兆以太网接口;所述第二电力载波模块对外连接有第二千兆以太网接口;所述第一电力载波模块包括:与第一千兆以太网接口连接的第一电子载波解调器、与第一电子载波解调器和第一千兆以太网接口连接的控制器、以及为所述第一电子载波解调器、控制器供电的第一电源模块;所述第二电力载波模块包括:与第二千兆以太网接口连接的第二电子载波解调器、与所述控制器连接的rs485收发器、与所述rs485收发器连接的mcu、以及为所述第二电子载波解调器和所述mcu供电的第二电源模块;所述第一电力载波模块和第二电力载波模块通过第一电源模块和第二电源模块的48v线缆连接。
2、优选的,所述第二电源模块包括电源输出接口,用于外部设备供电。
3、优选的,所述第一电力载波模块对外还连接有第一uart接口;所述第二电力载波模块对外还连接有第二uart接口。
4、优选的,所述第一千兆以太网接口和第二千兆以太网接口都可用于外接末端外接网口设备;所述末端外接网口设备包括相机、摄像机、红外传感器、拾音器中的任一种或多种。
5、优选的,所述第一uart接口和第二uart接口都可用于外接末端uart设备,所述末端uart设备包括夹爪、气泵、灵巧手、力矩传感器、温度传感器中的任一种或多种。
6、优选的,所述控制器连接有外部接口,所述外部接口包括数据串口、电池接口、电源线接口、充电外接接口、总开关、指示灯、复位模块、sd卡插入口、以及usb连接口中的任一种或多种。
7、优选的,所述第一电源模块和第二电源模块都集成dc-dc转换器,通过dc-dc转换器形成5v和3.3v的直流供电电源。
8、优选的,所述mcu连接有io模块。
9、优选的,所述io模块包括数字io接口和模拟io接口;所述数字io接口用来控制开关量信号;所述模拟io接口用来采集模拟信号或触发模拟信号执行器。
10、有益效果:本实用新型提供了一种具有千兆以太网接口的协作机器人系统,能够解决协作机器人因内部空间限制而将供电、通信线缆外置的问题,能使协作机器人适用更多或特殊场景;通过设有的第一电力载波模块和第二电力载波模块,可将载波信号数据转换到千兆以太网接口及uart接口,实现接口的数据交互,能够提高协作机器人末端执行、感知模块的通信速率,使机器人末端工具多出一路高速通信接口。另外,此通信接口与协作机器人工具io接口并没有直接相连,不会影响到机器人本体和工具io的通信,保留了工具io接口的实时性和可靠性。可使协作机器人的应用场景更加广泛、丰富。
技术特征:
1.一种具有千兆以太网接口的协作机器人系统,其特征在于,包括电力载波模块,所述电力载波模块包括第一电力载波模块和第二电力载波模块;所述第一电力载波模块对外连接有第一千兆以太网接口;所述第二电力载波模块对外连接有第二千兆以太网接口;所述第一电力载波模块包括:与第一千兆以太网接口连接的第一电子载波解调器、与第一电子载波解调器和第一千兆以太网接口连接的控制器、以及为所述第一电子载波解调器、控制器供电的第一电源模块;所述第二电力载波模块包括:与第二千兆以太网接口连接的第二电子载波解调器、与所述控制器连接的rs485收发器、与所述rs485收发器连接的mcu、以及为所述第二电子载波解调器和所述mcu供电的第二电源模块;所述第一电力载波模块和第二电力载波模块通过第一电源模块和第二电源模块的48v线缆连接。
2.如权利要求1所述的一种具有千兆以太网接口的协作机器人系统,其特征在于,所述第二电源模块包括电源输出接口,用于外部设备供电。
3.如权利要求1所述的一种具有千兆以太网接口的协作机器人系统,其特征在于,所述第一电力载波模块对外还连接有第一uart接口;所述第二电力载波模块对外还连接有第二uart接口。
4.如权利要求3所述的一种具有千兆以太网接口的协作机器人系统,其特征在于,所述第一千兆以太网接口和第二千兆以太网接口都可用于外接末端外接网口设备;所述末端外接网口设备包括相机、摄像机、红外传感器、拾音器中的任一种或多种。
5.如权利要求3所述的一种具有千兆以太网接口的协作机器人系统,其特征在于,所述第一uart接口和第二uart接口都可用于外接末端uart设备,所述末端uart设备包括夹爪、气泵、灵巧手、力矩传感器、温度传感器中的任一种或多种。
6.如权利要求5所述的一种具有千兆以太网接口的协作机器人系统,其特征在于,所述控制器连接有外部接口,所述外部接口包括数据串口、电池接口、电源线接口、充电外接接口、总开关、指示灯、复位模块、sd卡插入口、以及usb连接口中的任一种或多种。
7.如权利要求6所述的一种具有千兆以太网接口的协作机器人系统,其特征在于,所述第一电源模块和第二电源模块都集成dc-dc转换器,通过dc-dc转换器形成5v和3.3v的直流供电电源。
8.如权利要求7所述的一种具有千兆以太网接口的协作机器人系统,其特征在于,所述mcu连接有io模块。
9.如权利要求8所述的一种具有千兆以太网接口的协作机器人系统,其特征在于,所述io模块包括数字io接口和模拟io接口;所述数字io接口用来控制开关量信号;所述模拟io接口用来采集模拟信号或触发模拟信号执行器。
技术总结
本技术公开了一种具有千兆以太网接口的协作机器人系统,包括电力载波模块,所述电力载波模块包括第一电力载波模块和第二电力载波模块;所述第一电力载波模块对外连接有第一千兆以太网接口和第一UART接口;所述第二电力载波模块对外连接有第二千兆以太网接口和第二UART接口。通过设有的第一电力载波模块和第二电力载波模块,可将载波信号数据转换到千兆以太网接口及UART接口,实现接口的数据交互,能够提高协作机器人末端执行、感知模块的通信速率,使机器人末端工具多出一路高速通信接口。
技术研发人员:毛吉灿,蔡嵩林,孙恺,曹宇男
受保护的技术使用者:苏州艾利特机器人有限公司
技术研发日:20221116
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!