一种井下矿卡无人驾驶系统的制作方法
本技术涉及井下矿卡无人驾驶,尤其是涉及一种井下矿卡无人驾驶系统。
背景技术:
1、井下工作环境恶劣,传统由人坐在驾驶室内驾驶矿卡的方式难以保证驾驶人员的安全。井下矿卡无人驾驶系统能够将驾驶员从井下环境中解放出来。但是现有技术中对井下矿卡无人驾驶的研究较少,少数的井下矿卡无人驾驶系统仅仅基于视频采集与无线传输进行井下矿卡的远程遥控,却不能实现井下矿卡的自动驾驶,无法完全释放驾驶员,而且远程驾驶模块对网络的依赖高,同时一般网络时延较高、不能满足矿卡对低时延的驾驶需求,安全性、可靠性均较低。
技术实现思路
1、针对现有技术存在的问题,本实用新型提供一种井下矿卡无人驾驶系统,能够提高井下矿卡自动驾驶与远程驾驶的精度、效率及安全性、稳定性和可靠性。
2、本实用新型的技术方案为:
3、一种井下矿卡无人驾驶系统,包括设置在矿卡上的电源模块、定位模块、感知模块、网络模块、数据存储模块、控制模块及设置在远程驾驶舱内的远程驾驶模块;所述电源模块与所述定位模块、感知模块、网络模块、数据存储模块、控制模块连接;
4、所述定位模块包括惯性测量单元、第一激光雷达、四个速度传感器,所述惯性测量单元设置在矿卡前侧,所述第一激光雷达设置在矿卡顶部,四个速度传感器分别设置在矿卡的四个轮毂上;所述感知模块包括五个摄像头、四个第二激光雷达、两个毫米波雷达,五个摄像头分别设置在矿卡的前侧、后侧、左侧、右侧、顶部,四个第二激光雷达两个一组分别设置在矿卡的前侧、后侧,两个毫米波雷达分别设置在矿卡的前侧、后侧;所述网络模块包括5g路由器、交换机;所述数据存储模块包括nas存储器;
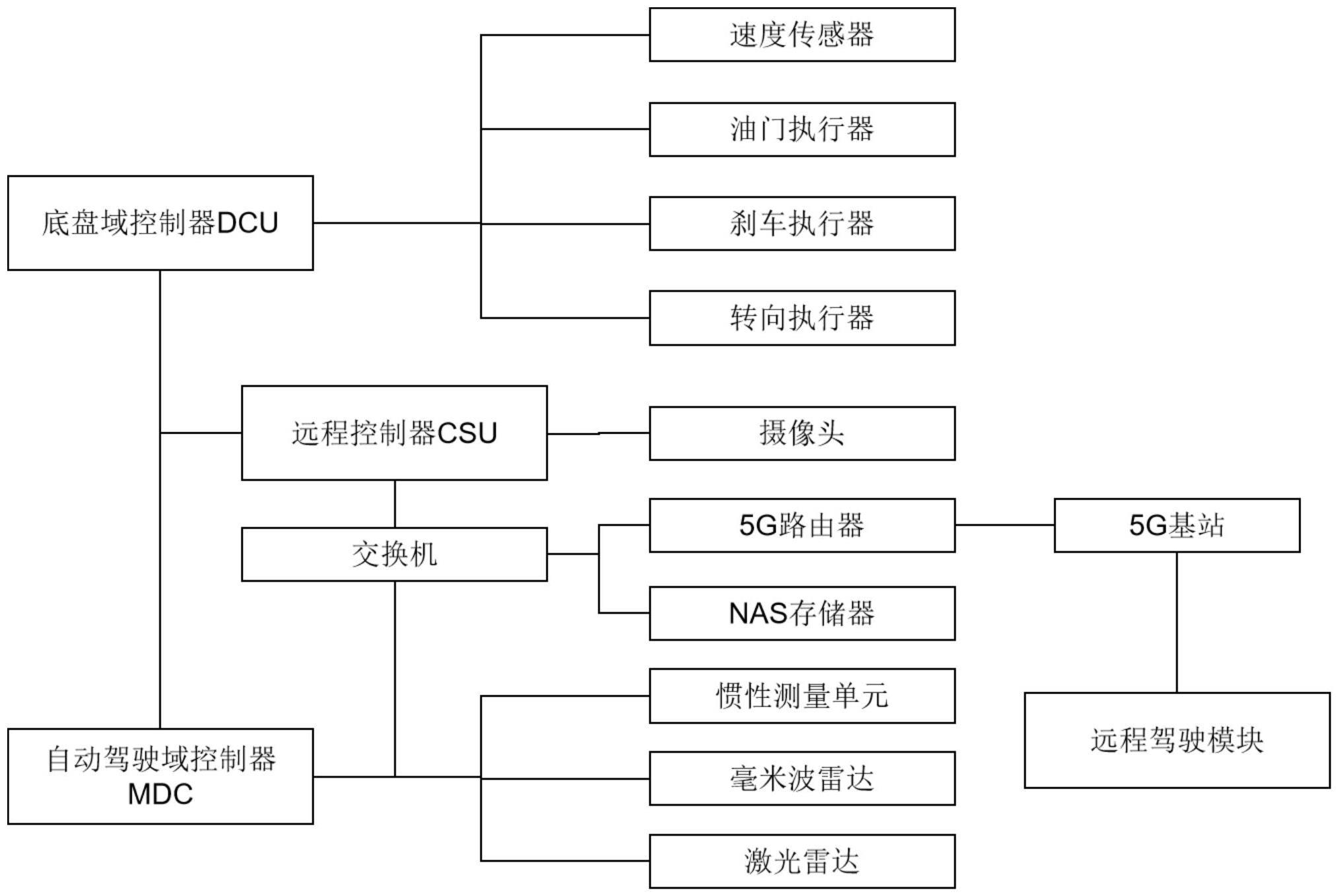
5、所述控制模块包括底盘域控制器dcu、远程控制器csu、自动驾驶域控制器mdc;所述底盘域控制器dcu与所述远程控制器csu、自动驾驶域控制器mdc、每个速度传感器及矿卡的油门执行器、刹车执行器、转向执行器通过can总线连接;所述远程控制器csu与每个摄像头通过ahd模拟视频线连接,所述远程控制器csu与所述交换机连接;所述自动驾驶域控制器mdc与所述远程控制器csu、惯性测量单元、每个毫米波雷达通过can总线连接,所述自动驾驶域控制器mdc与所述交换机、每个激光雷达通过网线连接;所述nas存储器与所述交换机通过网线连接,所述交换机与所述5g路由器连接,所述5g路由器、远程驾驶模块均与5g基站连接。
6、进一步的,所述自动驾驶域控制器mdc用于通过底盘域控制器dcu从速度传感器、油门执行器、刹车执行器、转向执行器分别获取矿卡的车速、油门、刹车、方向盘转角信息,通过远程控制器csu从摄像头获取矿卡的路况图像,通过can总线从惯性测量单元、毫米波雷达分别获取矿卡的三轴姿态角及加速度数据、障碍物与矿卡之间的距离及方位数据,通过网线从第一激光雷达获取障碍物的三维点云数据、从第二激光雷达获取障碍物与矿卡之间的距离数据;所述自动驾驶域控制器mdc用于根据获取的数据生成自动驾驶控制指令,并通过can总线将自动驾驶控制指令发送给所述底盘域控制器dcu,所述底盘域控制器dcu用于根据自动驾驶控制指令控制矿卡的油门执行器、刹车执行器、转向执行器,实现井下矿卡的自动驾驶。
7、进一步的,所述自动驾驶域控制器mdc、远程控制器csu用于通过所述交换机、5g路由器与所述远程驾驶模块建立通信,所述远程驾驶模块用于获取所述自动驾驶域控制器mdc、远程控制器csu获取的数据并根据获取的数据形成远程驾驶控制指令发送给所述底盘域控制器dcu,所述底盘域控制器dcu用于根据接收到的远程驾驶控制指令控制矿卡的油门执行器、刹车执行器、转向执行器,实现井下矿卡的远程驾驶。
8、进一步的,所述远程驾驶模块包括远程驾驶服务器、显示器、远程驾驶控制台;所述远程驾驶服务器与所述5g基站、显示器、远程驾驶控制台连接,所述远程驾驶服务器用于获取所述自动驾驶域控制器mdc、远程控制器csu获取的数据并将获取的数据发送给所述显示器,所述显示器用于显示接收到的数据;所述远程驾驶控制台包括油门模拟器、刹车模拟器、转向模拟器,所述远程驾驶控制台用于生成远程驾驶控制指令通过所述远程驾驶服务器发送给所述底盘域控制器dcu。
9、进一步的,所述nas存储器用于通过所述交换机获取所述自动驾驶域控制器mdc、远程控制器csu获取的数据并对获取的数据进行实时存储。
10、进一步的,包括设置在矿卡上的安全提示模块,所述安全提示模块用于显示矿卡的驾驶状态信息;所述驾驶状态包括自动驾驶状态、远程驾驶状态、紧急状态。
11、进一步的,所述电源模块包括24v电源、配电盒、电源转换器,所述24v电源与所述配电盒连接,所述配电盒的每一路连接保险丝、继电器、电源转换器后分别与所述惯性测量单元、第一激光雷达、速度传感器、摄像头、第二激光雷达、毫米波雷达、5g路由器、交换机、nas存储器、底盘域控制器dcu、远程控制器csu、自动驾驶域控制器mdc连接,所述底盘域控制器dcu与所述继电器连接,所述底盘域控制器dcu用于通过控制继电器来控制配电盒各路电路的通断。
12、本实用新型的有益效果为:
13、(1)本实用新型通过设置包括惯性测量单元、第一激光雷达、四个速度传感器的定位模块并设置包括五个摄像头、四个第二激光雷达、两个毫米波雷达的感知模块,能够获取井下矿卡全方位的位置信息、障碍物及路况信息;通过设置包括5g路由器、交换机的网络模块,能够为各设备间提供稳定、高效的网络信息交互;通过设置包括nas存储器的数据存储模块,能够实现网络数据及视频数据的实时存储;通过设置底盘域控制器dcu获取矿卡的车速、油门、刹车、方向盘信息,通过设置远程控制器csu获取路况图像信息,通过设置自动驾驶域控制器mdc获取底盘域控制器dcu、远程控制器csu的数据并获取矿卡及障碍物的相关数据、根据获取的数据生成自动驾驶控制指令通过底盘域控制器dcu控制油门、刹车、转向设备,实现井下矿卡的自动驾驶,完全释放驾驶员。上述各模块通过信息交互,提高了井下矿卡自动驾驶的精度、效率及安全性、稳定性和可靠性。
14、(2)本实用新型通过设置远程驾驶模块与自动驾驶域控制器mdc、远程控制器csu通过交换机、5g路由器建立通信,能够实时显示矿卡全方位的位置信息、障碍物及路况信息,并生成远程驾驶控制指令通过底盘域控制器dcu控制矿卡的油门、刹车、转向设备,实现井下矿卡的远程驾驶,并降低井下矿卡远程驾驶的时延,提高井下矿卡远程驾驶的精度、效率及安全性、稳定性和可靠性。
15、(3)本实用新型通过设置包括24v电源、配电盒、电源转换器的电源模块,并在配电盒的每一路连接保险丝、继电器、电源转换器,且底盘域控制器dcu与继电器连接来控制配电盒各路电路的通断,能够为每一路设备提供安全稳定可靠的电源,且便于电源管理,提升自动驾驶与远程驾驶的稳定性与可靠性。
技术特征:
1.一种井下矿卡无人驾驶系统,其特征在于,包括设置在矿卡上的电源模块、定位模块、感知模块、网络模块、数据存储模块、控制模块及设置在远程驾驶舱内的远程驾驶模块;所述电源模块与所述定位模块、感知模块、网络模块、数据存储模块、控制模块连接;
2.根据权利要求1所述的井下矿卡无人驾驶系统,其特征在于,所述自动驾驶域控制器mdc用于通过底盘域控制器dcu从速度传感器、油门执行器、刹车执行器、转向执行器分别获取矿卡的车速、油门、刹车、方向盘转角信息,通过远程控制器csu从摄像头获取矿卡的路况图像,通过can总线从惯性测量单元、毫米波雷达分别获取矿卡的三轴姿态角及加速度数据、障碍物与矿卡之间的距离及方位数据,通过网线从第一激光雷达获取障碍物的三维点云数据、从第二激光雷达获取障碍物与矿卡之间的距离数据;所述自动驾驶域控制器mdc用于根据获取的数据生成自动驾驶控制指令,并通过can总线将自动驾驶控制指令发送给所述底盘域控制器dcu,所述底盘域控制器dcu用于根据自动驾驶控制指令控制矿卡的油门执行器、刹车执行器、转向执行器,实现井下矿卡的自动驾驶。
3.根据权利要求2所述的井下矿卡无人驾驶系统,其特征在于,所述自动驾驶域控制器mdc、远程控制器csu用于通过所述交换机、5g路由器与所述远程驾驶模块建立通信,所述远程驾驶模块用于获取所述自动驾驶域控制器mdc、远程控制器csu获取的数据并根据获取的数据形成远程驾驶控制指令发送给所述底盘域控制器dcu,所述底盘域控制器dcu用于根据接收到的远程驾驶控制指令控制矿卡的油门执行器、刹车执行器、转向执行器,实现井下矿卡的远程驾驶。
4.根据权利要求3所述的井下矿卡无人驾驶系统,其特征在于,所述远程驾驶模块包括远程驾驶服务器、显示器、远程驾驶控制台;所述远程驾驶服务器与所述5g基站、显示器、远程驾驶控制台连接,所述远程驾驶服务器用于获取所述自动驾驶域控制器mdc、远程控制器csu获取的数据并将获取的数据发送给所述显示器,所述显示器用于显示接收到的数据;所述远程驾驶控制台包括油门模拟器、刹车模拟器、转向模拟器,所述远程驾驶控制台用于生成远程驾驶控制指令通过所述远程驾驶服务器发送给所述底盘域控制器dcu。
5.根据权利要求2所述的井下矿卡无人驾驶系统,其特征在于,所述nas存储器用于通过所述交换机获取所述自动驾驶域控制器mdc、远程控制器csu获取的数据并对获取的数据进行实时存储。
6.根据权利要求1所述的井下矿卡无人驾驶系统,其特征在于,包括设置在矿卡上的安全提示模块,所述安全提示模块用于显示矿卡的驾驶状态信息;所述驾驶状态包括自动驾驶状态、远程驾驶状态、紧急状态。
7.根据权利要求1所述的井下矿卡无人驾驶系统,其特征在于,所述电源模块包括24v电源、配电盒、电源转换器,所述24v电源与所述配电盒连接,所述配电盒的每一路连接保险丝、继电器、电源转换器后分别与所述惯性测量单元、第一激光雷达、速度传感器、摄像头、第二激光雷达、毫米波雷达、5g路由器、交换机、nas存储器、底盘域控制器dcu、远程控制器csu、自动驾驶域控制器mdc连接,所述底盘域控制器dcu与所述继电器连接,所述底盘域控制器dcu用于通过控制继电器来控制配电盒各路电路的通断。
技术总结
本技术涉及井下矿卡无人驾驶技术领域,提供一种井下矿卡无人驾驶系统,包括电源、定位、感知、网络、数据存储、控制模块及远程驾驶模块;定位模块包括惯性测量单元、激光雷达、速度传感器;感知模块包括摄像头、激光雷达、毫米波雷达;网络模块包括5G路由器、交换机;控制模块中底盘域控制器DCU与远程控制器CSU、自动驾驶域控制器MDC、速度传感器及油门、刹车、转向执行器连接;CSU与摄像头、交换机连接;MDC与CSU、惯性测量单元、毫米波雷达、交换机、激光雷达连接;交换机连5G路由器,5G路由器、远程驾驶模块与5G基站连接。本技术能够提高井下矿卡自动驾驶与远程驾驶的精度、效率及安全性、稳定性和可靠性。
技术研发人员:康文宝,张东永,邹龙,李玉哲,瞿士文,贾智
受保护的技术使用者:金川集团股份有限公司
技术研发日:20221230
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!