动态站点上的机器人自主的语义模型的制作方法
本公开涉及动态站点(site)上的机器人自主的语义模型。
背景技术:
1、机器人通常被定义为可重新编程的多功能操纵器,其被设计成通过可变的编程运动来移动材料、零件、工具或专用设备,以执行任务。机器人可以是物理锚定的操纵器(例如,工业机器人手臂)、在环境中移动的移动机器人(例如,腿、轮子或基于牵引的机构),或者操纵器和移动机器人的某种组合。机器人用于各种行业,包括例如制造、运输、危险环境、勘探和医疗保健。因此,机器人利用协调运动穿过有障碍物的环境的能力为这些行业提供了额外的益处。
技术实现思路
1、本公开的一方面提供了一种计算机实现的方法,该方法在由数据处理硬件执行时使数据处理硬件执行操作。所述操作包括当机器人穿过建筑环境时,接收由机器人的一个或多个传感器捕获的传感器数据。所述操作包括接收用于建筑环境的建筑信息模型(bim)。该bim包括标识建筑环境内的一个或多个永久对象的语义信息。所述操作包括为建筑环境的定位地图生成多个定位候选。多个定位候选中的每个定位候选对应于由传感器数据标识的建筑环境的特征,并且表示用于机器人的潜在定位参考点。定位地图被配置为当机器人在整个建筑环境中移动时在建筑环境内定位机器人。所述操作包括对于每个定位候选,确定对应于相应定位候选的相应特征是否是由bim的语义信息标识的建筑环境中的永久对象,并且当对应于相应定位候选的相应特征是由bim的语义信息标识的建筑环境中的相应永久对象时,生成相应定位候选作为用于机器人的定位地图中的定位参考点。
2、本公开的方面可以提供一个或多个以下可选特征。在一些实施方式中,定位地图自主地引导机器人通过建筑环境。在一些实施例中,所述操作还包括将建筑环境的定位地图馈送给机器人的感知系统。该感知系统被配置为当机器人导航建筑环境在建筑环境内执行任务时,为机器人执行避障。在一些示例中,bim还包括调度信息。该调度信息指示新的永久对象将被安装在建筑环境中的时间。在那些示例中,所述操作还包括在新的永久对象被安装在建筑环境中的时间之后,指示机器人为新的永久对象捕获传感器数据,并且基于为安装在建筑环境中的新的永久对象捕获的传感器数据来更新定位地图。在一些实施例中,语义信息包括建筑环境内的对象的描述符,所述操作还包括指示机器人基于建筑环境内的对象的一个或多个描述符来捕获传感器数据。
3、在一些实施方式中,bim还包括机器人的非步进区域。该非步进区域指示机器人应该避免步进的区域。在那些实施方式中,操作还包括在定位地图中生成非步进区域,以根据bim表示机器人的非步进区域。在另外的实施方式中,操作还包括将非步进区域传送给步进规划控制器。该步进规划控制器被配置为当机器人在建筑环境内执行任务时协调机器人的脚步放置。在一些实施例中,所述操作还包括从机器人的操作者接收用于机器人在建筑环境内执行的创作的任务,以及使用定位地图在建筑环境中自主地导航以执行创作的任务。
4、在一些示例中,所述操作还包括通过确定从由机器人捕获的传感器数据标识的感知对象的位置、标识bim中对应于从由机器人捕获的传感器数据标识的感知对象的位置的相应位置、以及确定bim未能指示相应位置处的永久对象,从定位地图中移除非永久对象。在一些实施方式中,机器人包括四个腿。在一些实施例中,bim包括建筑环境的三维表示。
5、本公开的另一方面提供了一种机器人。该机器人包括主体、耦合到主体的一个或多个基于运动的结构、至少部分地设置在主体上的传感器系统、与传感器系统通信的数据处理硬件以及与数据处理硬件通信的存储器硬件。存储器硬件存储指令,当所述指令在数据处理硬件上执行时使数据处理硬件执行操作。所述操作包括当机器人穿过建筑环境时,接收由机器人的传感器系统捕获的传感器数据。所述操作包括接收用于建筑环境的建筑信息模型(bim)。bim包括标识建筑环境内的一个或多个永久对象的语义信息。所述操作包括为建筑环境的定位地图生成多个定位候选。多个定位候选中的每个定位候选对应于由传感器数据标识的建筑环境的特征,并且表示用于机器人的潜在定位参考点。定位地图被配置为当机器人在整个建筑环境中移动时在建筑环境内定位机器人。所述操作包括对于每个定位候选,确定对应于相应定位候选的相应特征是否是由bim的语义信息标识的建筑环境中的永久对象,并且当对应于相应定位候选的相应特征是由bim的语义信息标识的建筑环境中的相应永久对象时,生成相应定位候选作为用于机器人的定位地图中的定位参考点。
6、本公开的这个方面可以包括以下可选特征中的一个或多个。在一些实施方式中,定位地图自主地引导机器人通过建筑环境。在一些实施例中,所述操作还包括将建筑环境的定位地图馈送给机器人的感知系统。该感知系统被配置为当机器人在建筑环境内执行任务时,为机器人执行避障。在一些示例中,bim还包括调度信息。调度信息指示新的永久对象将被安装在建筑环境中的时间。在那些示例中,操作还包括指示机器人在新的永久对象被安装在建筑环境中的时间之后为新的永久对象捕获传感器数据,并且基于为安装在建筑环境中的新的永久对象捕获的传感器数据来更新定位地图。在一些实施例中,语义信息包括建筑环境内的对象的描述符,所述操作还包括指示机器人基于建筑环境内的对象的一个或多个描述符来捕获传感器数据。
7、在一些实施方式中,bim还包括机器人的非步进区域。非步进区域指示机器人应该避免步进的区域。在那些实施方式中,所述操作还包括在定位地图中生成非步进区域,以根据bim表示机器人的非步进区域。在另外的实施方式中,所述操作还包括将非步进区域传送给步进规划控制器。步进规划控制器被配置为当机器人在建筑环境内执行任务时协调机器人的脚步放置。在一些实施例中,所述操作还包括从机器人的操作者接收用于机器人在建筑环境内执行的创作的任务,以及使用定位地图在建筑环境中自主地导航以执行创作的任务。
8、在一些示例中,所述操作还包括通过确定从由机器人捕获的传感器数据标识的感知对象的位置、标识bim中对应于从由机器人捕获的传感器数据标识的感知对象的位置的相应位置、以及确定bim未能指示相应位置处的永久对象,从定位地图中移除非永久对象。在一些实施方式中,一个或多个基于移动的结构包括四个腿。在一些实施例中,bim包括建筑环境的三维表示。
9、在附图和以下描述中阐述了本公开的一个或多个实施方式的细节。根据说明书和附图以及权利要求书,其他方面、特征和优点将变得显而易见。
技术特征:
1.一种计算机实现的方法(300),其在由数据处理硬件(142、162、410)执行时使所述数据处理硬件(142、162、410)执行操作,所述操作包括:
2.根据权利要求1所述的方法(300),其中,所述定位地图(202)自主地引导所述机器人(100)通过所述建筑环境(10)。
3.根据权利要求1或权利要求2所述的方法(300),其中,所述操作还包括将所述建筑环境(10)的所述定位地图(202)馈送到所述机器人(100)的感知系统(180),所述感知系统(180)被配置为当所述机器人(100)导航所述建筑环境(10)在所述建筑环境(10)内执行任务时,为所述机器人(100)执行避障。
4.根据权利要求1-3中任一项所述的方法(300),其中:
5.根据权利要求1-4中任一项所述的方法(300),其中:
6.根据权利要求1-5中任一项所述的方法(300),其中:
7.根据权利要求6所述的方法(300),其中,所述操作还包括将所述非步进区域传送给步进规划控制器(176),所述步进规划控制器(176)被配置为当所述机器人(100)在所述建筑环境(10)内执行任务时协调所述机器人(100)的脚步放置。
8.根据权利要求1-7中任一项所述的方法(300),其中,所述操作还包括:
9.根据权利要求1-8中任一项所述的方法(300),其中,所述操作还包括通过以下方式从所述定位地图(202)中移除非永久对象(npo):
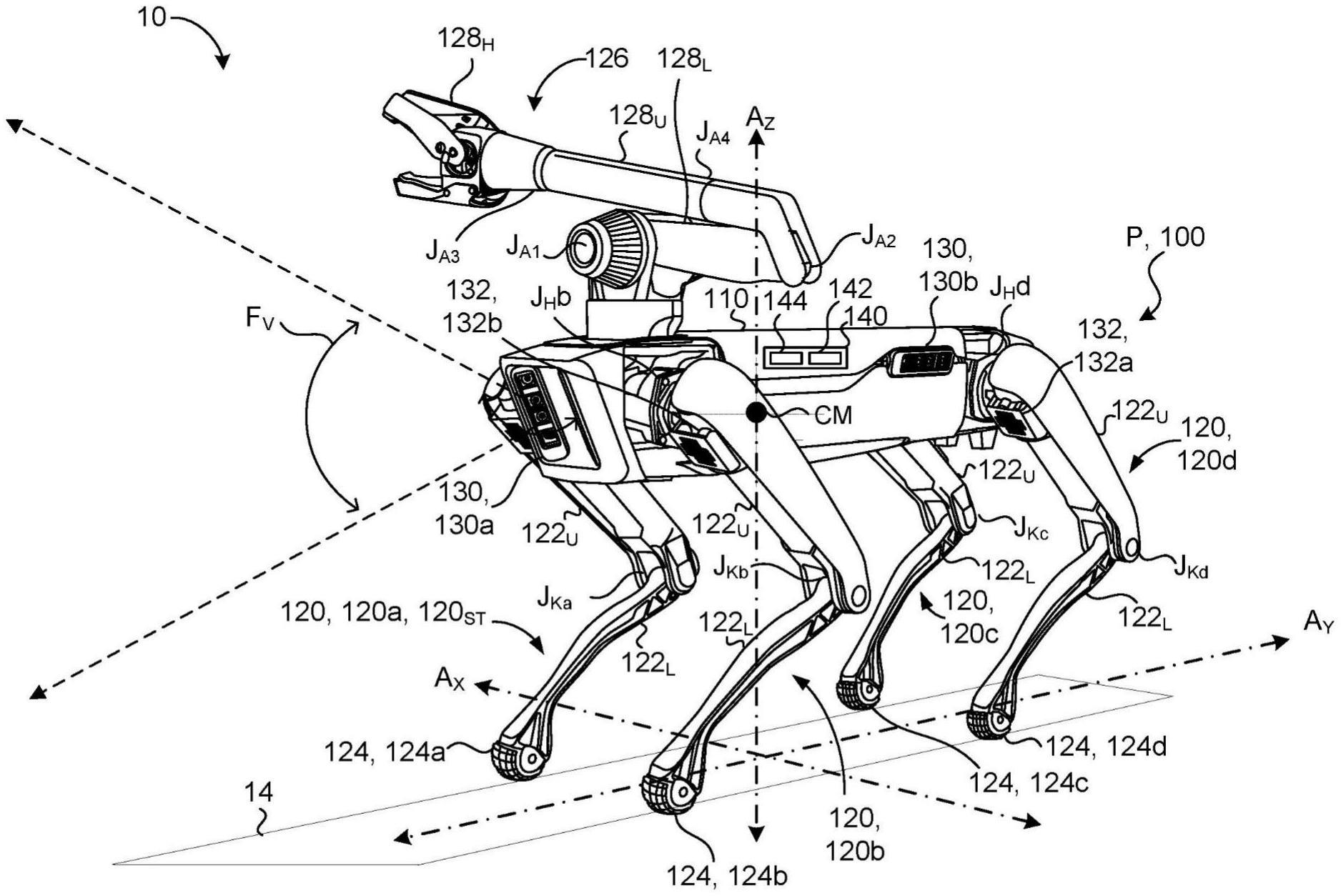
10.根据权利要求1-9中任一项所述的方法(300),其中,所述机器人(100)包括四个腿(120、120a-d)。
11.根据权利要求1-10中任一项所述的方法(300),其中,所述bim(30)包括所述建筑环境(10)的三维表示。
12.一种机器人(100),包括:
13.根据权利要求12所述的机器人(100),其中,所述定位地图(202)自主地引导所述机器人(100)通过所述建筑环境(10)。
14.根据权利要求12或13所述的机器人(100),其中,所述操作还包括将所述建筑环境(10)的所述定位地图(202)馈送到所述机器人(100)的感知系统(180),所述感知系统(180)被配置为当所述机器人(100)导航所述建筑环境(10)在所述建筑环境(10)内执行任务时,为所述机器人(100)执行避障。
15.根据权利要求12-14中任一项所述的机器人(100),其中:
16.根据权利要求12-15中任一项所述的机器人(100),其中:
17.根据权利要求12-16中任一项所述的机器人(100),其中:
18.根据权利要求17所述的机器人(100),其中,所述操作还包括将所述非步进区域传送给步进规划控制器(176),所述步进规划控制器(176)被配置为当所述机器人(100)在所述建筑环境(10)内执行任务时协调所述机器人(100)的脚步放置。
19.根据权利要求12-18中任一项所述的机器人(100),其中,所述操作还包括:
20.根据权利要求12-19中任一项所述的机器人(100),其中,所述操作还包括通过以下方式从所述定位地图(202)中移除非永久对象(npo):
21.根据权利要求12-20中任一项所述的机器人(100),其中,所述一个或多个基于运动的结构(120)包括四个腿(120、120a-d)。
22.根据权利要求12-21中任一项所述的机器人(100),其中,所述bim(30)包括所述建筑环境(10)的三维表示。
技术总结
一种方法(300)包括当机器人(100)穿过建筑环境(10)时,接收由机器人的传感器(132、132a‑n)捕获的传感器数据(134)。该方法包括接收用于环境的建筑信息模型(BIM)(30),该建筑信息模型包括标识环境内的永久对象(PO)的语义信息(32)。该方法包括为环境的定位地图(202)生成定位候选(212、212a‑n)。每个定位候选(212)对应于由传感器数据标识的环境的特征,并且表示潜在的定位参考点(222)。定位地图被配置为在环境内定位机器人。对于每个定位候选,该方法包括确定对应于相应定位候选的相应特征是否是环境中的永久对象(PO),并且生成相应定位候选作为用于机器人的定位地图中的定位参考点(222)。
技术研发人员:M·达席尔瓦,D·乔纳克,M·克林根史密斯,S·塞弗尔特
受保护的技术使用者:波士顿动力公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!