一种基于RBF神经网络PID的自平衡车的控制方法
本发明涉及自平衡小车智能控制,具体为一种基于rbf神经网络pid的自平衡车的控制方法。
背景技术:
1、两轮自平衡车本质上是一种倒立摆机器人。它简单的机械结构使得它能够在狭小的空间内工作,也能够作为代步工具缓解交通压力,具有很好的应用前景。因为两轮自平衡车静态不稳定的特点,所以两轮自平衡车又被视作检验控制的经典平台。
2、目前pid控制是自平衡车控制的主要手段,pid控制具有控制算法简单的优点且控制效果较好。但是pid控制的参数一般需要手动进行调节,很难找到当前状态下理想的参数。
技术实现思路
1、本发明提供一种基于rbf神经网络pid的自平衡车的控制方法,解决了目前pid控制的参数需要手动进行调节,很难调节到理想的参数的问题。
2、为实现上述目的,本发明提供如下技术方案:一种基于rbf神经网络pid的自平衡车的控制方法,包括以下步骤:
3、s1、确定rbf神经网络的结构中的输入层节点数和隐含层节点数;
4、s2、初始化,给出各层权值的初始值、学习速率η、动量因子α和pid初始参数;
5、s3、对输入信号r(k)以及输出信号y(k)进行采样,并计算此时刻的控制误差e(k);
6、s4、对pid控制器采用增量式pid,并根据rbf神经网络计算出pid控制器的三个参数,并对自平衡车进行控制;
7、s5、计算rbf神经网络的输出,得到辨识信息,根据梯度下降法对相应的权值进行调整;
8、s6、进行下次采样控制,且k=k+1,返回到s1继续。
9、优选的,神经网络pid控制器的三个参数包括kp、ki和kd。
10、优选的,通过所述rbf神经网络计算出的pid控制器具体步骤包括:
11、1)首先,pid控制器采用增量式pid,控制误差e(k)=r(k)-y(k),则pid控制器三项输入为:
12、xc(1)=e(k)-e(k-1)
13、xc(2)=e(k)
14、xc(3)=e(k)-2e(k-1)+e(k-2)
15、2)控制算法为:
16、u(k)=u(k-1)+△u(k)
17、△u(k)=kp(e(k)-e(k-1))+kie(k)+kd(e(k)-2e(k-1)+e(k-2));
18、3)神经网络的整定指标为:
19、
20、优选的,采用下降梯度法对pid三个参数kp,ki,kd进行调整:
21、
22、
23、
24、从而得到pid三个参数:
25、kp(k)=kp(k-1)+δkp
26、ki(k)=ki(k-1)+δki
27、kd(k)=kd(k-1)+δkd
28、其中,为被控对象的jacobian信息,通过神经网络的辨识而得。
29、优选的,根据下降梯度法,得输出权、节点中心和节点的基宽度迭代算法:
30、wi(k)=wi(k-1)+η(y(k)-ym(k))hj+α(wj(k-1)-wj(k-2))
31、
32、bj(k)=bj(k-1)+ηδbj+α(bj(k-1)-bj(k-2))
33、
34、cji(k)=cji(k-1)+ηδcji+α(cji(k-1)-cji(k-2))
35、其中,η为学习速率,α为动量因子。
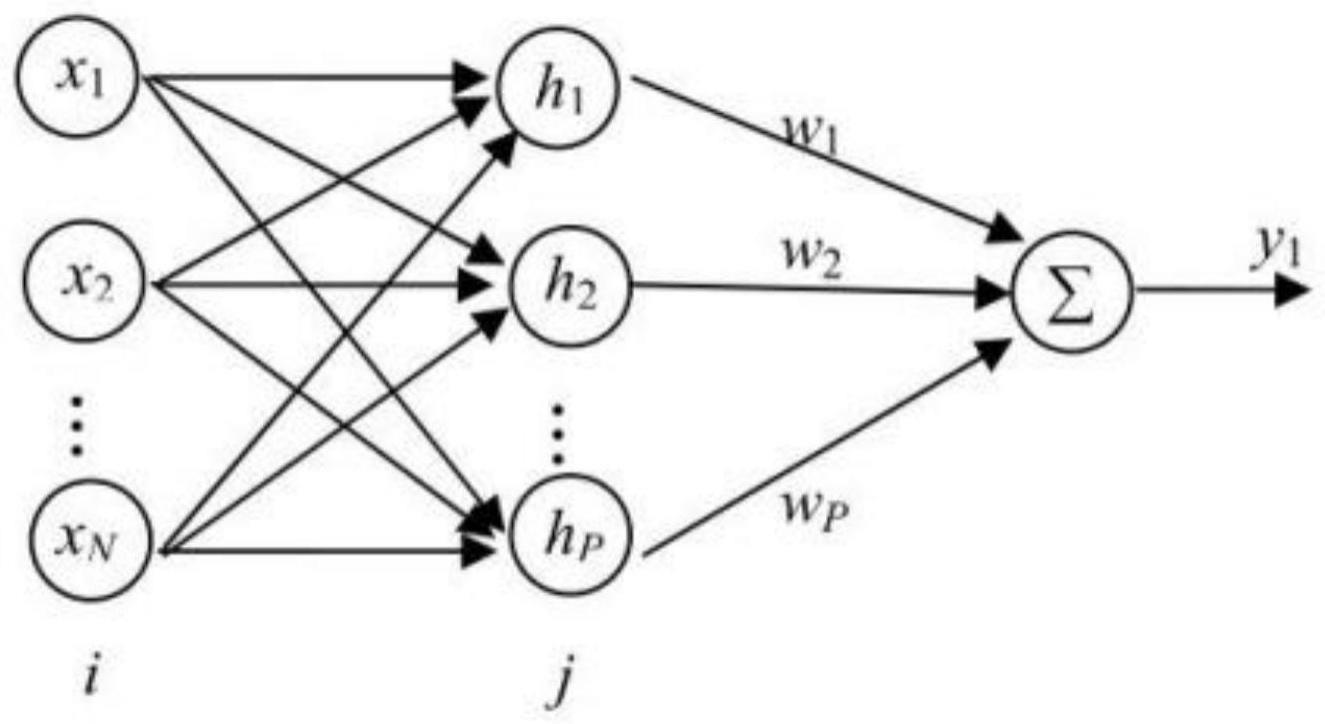
36、优选的,所述rbf神经网络包括:
37、1)第一层为输入层,由信号源节点组成;
38、2)第二层为隐含层,神经元的变换函数是一种局部分布的对中心点径向对称衰减的非负非线性函数;
39、3)第三层为输出层。
40、优选的,所述rbf神经网络含有i个输入节点,j个隐含节点,1个输出节点,其中网络输入层的输入量为:
41、x=[x1,x2,...,xn]t
42、输出层输出权值向量为:
43、w=[w1,w2,...,wp]t
44、隐含层的节点向量为:
45、h=[h1,h2,...,hj,...,hp]t
46、
47、其中,cj为第j个隐节点的中心向量和输入向量x具有相同的维数,bj为隐含层节点j的基宽度参数,且大于零。
48、优选的,所述rbf神经网络学习过程包括:
49、1)第一个部分隐含层,隐含层实现x到h的非线性映射;
50、2)第二部分为输出层,实现h到y1的映射。
51、优选的,所述rbf神经网络学习过程表达式为:
52、y1(k)=w1h1+w2h2+...+wphp
53、其中辨识网络的输出为:
54、ym(k)=w1h1+w1h2+...+wmhm。
55、与现有技术相比,本发明的有益效果:
56、1、本发明中,将rbf神经网络具有的学习模式引入到pid控制器中,按照一定的目标,在线调整pid控制器的参数,使之适应被控系统,由于参数、结构以及输入的变化,使被干扰的影响达到最小化。
57、2、本发明中,能采用并行分布的方法对信息进行处理和存储,对复杂问题进行求解时能够发挥计算机高速的运算能力,提高效率;可以多输入、多输出;可以最大化近似任何复杂非线性关系;能进行学习;如识别图像时,在神经网络中输入相应的图像和应该识别的结果,神经网络会通过它的自学习能力就可以实现识别类似图像的功能,可在面对复杂的系统建模和控制时具有很好的优势。
技术特征:
1.一种基于rbf神经网络pid的自平衡车的控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于rbf神经网络pid的自平衡车的控制方法,其特征在于:pid控制器的三个参数包括kp、ki和kd。
3.根据权利要求2所述的一种基于rbf神经网络pid的自平衡车的控制方法,其特征在于:通过所述rbf神经网络计算出的pid控制器具体步骤包括:
4.根据权利要求3所述的一种基于rbf神经网络pid的自平衡车的控制方法,其特征在于:采用下降梯度法对pid三个参数kp,ki,kd进行调整:
5.根据权利要求4所述的一种基于rbf神经网络pid的自平衡车的控制方法,其特征在于:根据下降梯度法,得输出权、节点中心和节点的基宽度迭代算法:
6.根据权利要求1所述的一种基于rbf神经网络pid的自平衡车的控制方法,其特征在于:所述rbf神经网络包括:
7.根据权利要求6所述的一种基于rbf神经网络pid的自平衡车的控制方法,其特征在于:所述rbf神经网络含有i个输入节点,j个隐含节点,1个输出节点,其中网络输入层的输入量为:
8.根据权利要求7所述的一种基于rbf神经网络pid的自平衡车的控制方法,其特征在于:所述rbf神经网络学习过程包括:
9.根据权利要求8所述的一种基于rbf神经网络pid的自平衡车的控制方法,其特征在于:所述rbf神经网络学习过程表达式为:
技术总结
本发明公开了一种基于RBF神经网络PID的自平衡车的控制方法,包括确定RBF神经网络的结构中的输入层节点数和隐含层节点数;初始化,给出各层权值的初始值、学习速率η、动量因子α和PID初始参数;对输入信号r(k)以及输出信号y(k)进行采样,并计算此时刻的控制误差e(k);对PID控制器采用增量式PID,并根据RBF神经网络计算出神经网络PID控制器的三个参数,并对自平衡车进行控制;计算RBF神经网络的输出,得到辨识信息,根据梯度下降法对相应的权值进行调整;进行下次采样控制,且k=k+1,返回到S1继续。本发明将RBF神经网络具有的学习模式引入到PID控制器中,使被干扰的影响达到最小化。
技术研发人员:曹登阳,芮舒扬,孙嵩松,龚小林,台永鹏,张子璇
受保护的技术使用者:南京林业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!