基于电动转向的紧急避障系统硬件在环平台及测试方法
本发明属于电动汽车主动安全,具体涉及一种基于电动转向的紧急避障系统硬件在环平台及测试方法。
背景技术:
1、交通事故发生的原因是多种多样的,雨雪天气、超速行驶、疲劳驾驶、道路散落障碍物等都会导致交通事故频频发生,智能汽车和智能驾驶系统的研发迫在眉睫。业内一致认为汽车上安装先进驾驶辅助系统是合理且必要的,其中,紧急避障技术作为先进驾驶辅助系统的重要组成部分而成为各大汽车企业和研究机构的热门研究领域。紧急避障技术属于汽车主动安全技术的一部分,与安全气囊等汽车被动安全技术来相比,汽车主动安全技术可以在一定程度上避免碰撞危险的发生,而后者仅仅能够在汽车已经发生事故时保护乘员与车辆本身以及最大程度地降低事故带来的生命财产损失。
2、在开发转向紧急避障功能时进行的试验存在一定危险性。实车避障功能在实际道路上的测试之前需要经过模型在环测试、软件在环测试、驾驶员在环测试、硬件在环(hardware-in-the-loop,hil)测试等开发阶段。在v模型开发流程中,硬件在环测试是在实车路测之前重要的一环,同时也是控制器开发过程中重要的测试验证方法。仿真测试系统接入被测控制器,通过运行仿真模型模拟受控对象的运行状态,为被测控制器形成虚拟车辆测试环境,实现对被测控制器功能性能的测试验证。传统的软件在环测试,真实度不足,测试数据误差大,传统的实车测试具有成本高,实验参数不易测量,开发周期长的问题。
技术实现思路
1、为了克服上述技术问题,本发明提出一种基于电动转向的紧急避障系统硬件在环平台及测试方法,通过上位机下载整车动力学模型和控制算法模型到ni pxi机箱中,基于can通讯的dsp控制器接收来自ni pxi机箱中整车动力学模型的车辆行驶参数,来模拟真实车辆行驶过程中各类传感器采集的参数,在进行独立的控制算法运行后输出转向电机信号到到执行电机的mcu中,控制转向电机运行;同时将转向电机信号同步发送至ni pxi机箱,使车辆模型同步行驶,实现虚拟整车模型与实际转向台架的虚实结合。转向电机与磁粉制动器相连,通过磁粉制动器模拟转向阻力,提高了仿真的真实度和开发效率。
2、为达到上述目的,本发明采用的技术方案如下:
3、第一方面,本发明提出了一种基于电动转向的紧急避障系统硬件在环平台,包括上位机、下位机、执行器与转向负载模拟平台,所述的上位机搭载仿真状态监视模块、紧急避障模型搭建模块和车辆动力学仿真模块,所述的下位机包括模型运行模块和dsp控制器,所述的执行器通过联轴器与转向负载模拟平台相连;
4、所述上位机中的紧急避障模型搭建模块、车辆动力学仿真模块生成的紧急避障模型、车辆动力学模型烧录到下位机中的模型运行模块和dsp控制器中,在模型运行过程中由上位机中的仿真状态监视模块监视车辆动力学模型的车辆运行画面并显示车辆运行参数;
5、dsp控制器用于接收下位机中的模型运行模块输出的车辆运行参数,运算紧急避障模型并输出控制指令信息至执行器;
6、所述执行器根据接收到的控制指令信息实现转向负载模拟平台的转向操作,并向dsp控制器和模型运行模块返回转向信息;所述转向负载模拟平台用于在执行器实现转向操作的过程中施加负载阻力。
7、作为本发明的优选,所述的dsp控制器采用tms320f28335芯片。
8、作为本发明的优选,所述的模型运行模块采用ni pxi机箱。
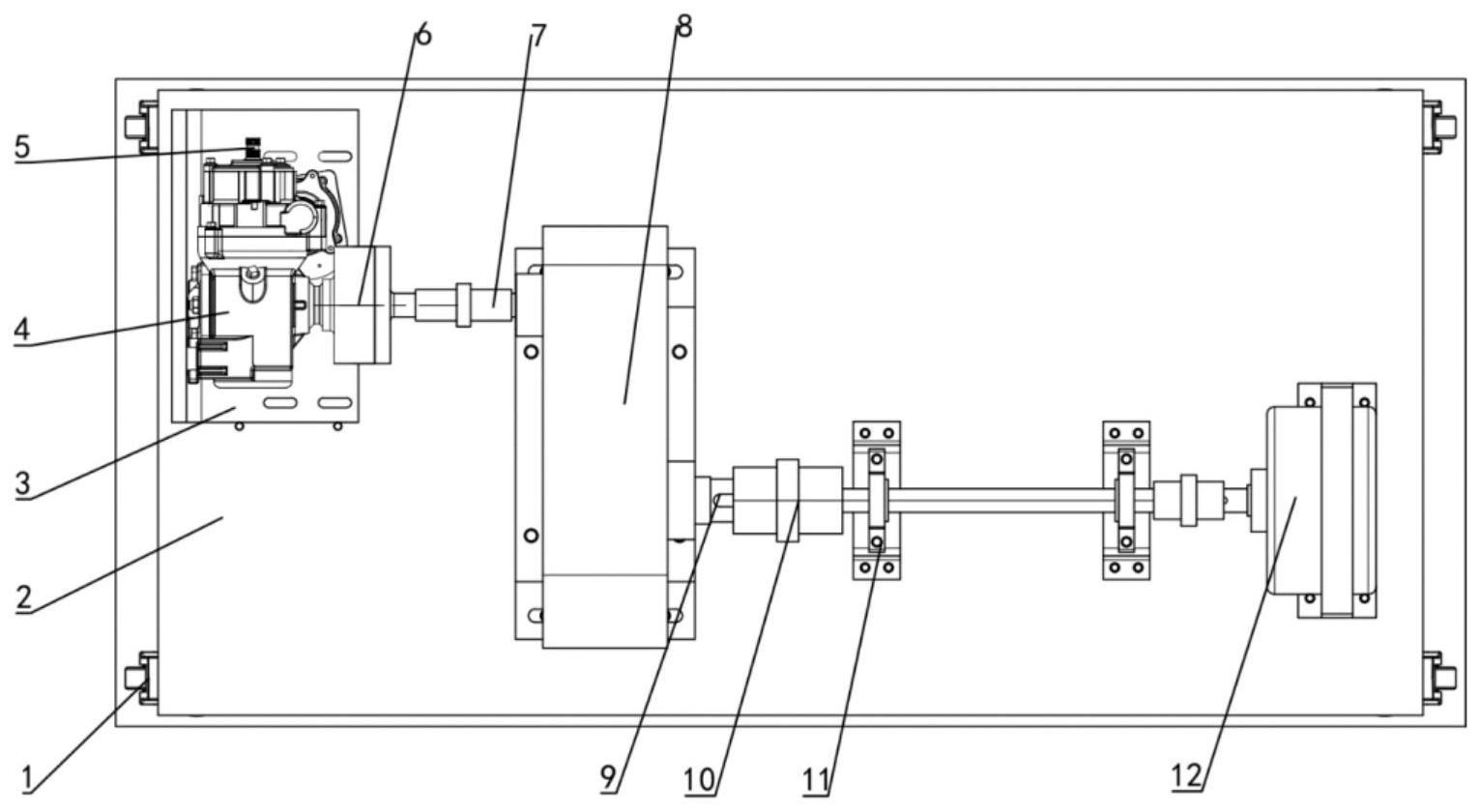
9、作为本发明的优选,所述的转向负载模拟平台包括平台基座、以及安装在平台基座上的减速器和磁粉制动器;所述的执行器输出轴通过第一联轴器与第一加载轴一端相连接,第一加载轴另一端通过第二联轴器与减速器输入轴相连接,减速器输出轴通过第三联轴器与第二加载轴一端相连接,第二加载轴另一端通过第四联轴器与磁粉制动器相连接。
10、作为本发明的优选,所述的执行器采用电动循环球转向器,所述的电动循环球转向器输出轴通过第一联轴器与转向负载模拟平台的减速器输入轴连接,电动循环球转向器用于控制转向负载模拟平台的磁粉制动器转动。
11、作为本发明的优选,所述的第一联轴器采用法兰联轴器,第二联轴器、第三联轴器、第四联轴器采用梅花联轴器。
12、作为本发明的优选,所述的第二加载轴通过轴承支架安装在平台基座上。
13、作为本发明的优选,所述上位机与下位机中的模型运行模块采用以太网通信,所述下位机中的模型运行模块与dsp控制器采用can通信,所述下位机中的dsp控制器、模型运行模块与执行器中的mcu采用can通信。
14、作为本发明的优选,所述的控制指令信息包括整车车速、目标方向盘转向指令角度、工作模式、指令转角有效位、命令系统状态、转向叠加扭矩信号、方向盘目标角速度、crc校验码;返回转向信息包括执行器中的mcu温度、对中状态、通讯life、故障码、电动转向电机状态、方向盘转角、电机助力扭矩、方向盘反馈角速度、转向盘转矩信号、控制器状态位、系统故障等级。
15、第二方面,本发明提出了一种基于电动转向的紧急避障系统硬件在环平台的测试方法,其特征在于,包括:
16、s1,将紧急避障模型、车辆动力学模型烧录到下位机中;
17、s2,上位机中的仿真状态监视模块实时监视车辆运行画面并显示车辆运行参数,下位机中的模型运行模块将车辆运行参数传输至dsp控制器;
18、s3,dsp控制器接收车辆运行参数,模拟真实车辆行驶过程中各类传感器采集的参数,并运行紧急避障模型,输出控制指令信息至执行器;
19、s4,执行器的mcu接收运行控制指令,控制转向负载模拟平台中的磁粉制动器转动,同时将返回转向信息发送至dsp控制器和模型运行模块,使车辆动力学模型同步行驶;
20、s5,不断调试基于电动转向的紧急避障系统的紧急避障模型,直至调试成功。
21、本发明的有益效果是:
22、(1)虚拟整车模型与实际转向台架的虚实结合,不用对实车进改装,直接通过dsp控制器对电动循环球转向器进行控制,为基于电动转向的紧急避障模型提供新的验证方案。
23、(2)本发明采用硬件在环测试平台实现多项式路径规划下的紧急避障测试方法,基于快速控制模型(rcp)的测试方法,可直接采用simulink模型进行测试,相对传统的纯软件仿真提高了仿真精度和真实度。
24、(3)本发明使得在验证紧急避障模型大幅度减少了实车上路测试的需求,避免了实车在紧急避障过程中产生的各种危险情况,极大的降低了紧急避障模型开发的成本和风险,并且提高了紧急避障模型开发的效率。
技术特征:
1.一种基于电动转向的紧急避障系统硬件在环平台,其特征在于,包括上位机、下位机、执行器与转向负载模拟平台,所述的上位机搭载仿真状态监视模块、紧急避障模型搭建模块和车辆动力学仿真模块,所述的下位机包括模型运行模块和dsp控制器,所述的执行器通过联轴器与转向负载模拟平台相连;
2.根据权利要求1所述的基于电动转向的紧急避障系统硬件在环平台,其特征在于,所述的dsp控制器采用tms320f28335芯片。
3.根据权利要求1所述的基于电动转向的紧急避障系统硬件在环平台,其特征在于,所述的模型运行模块采用nipxi机箱。
4.根据权利要求1所述的基于电动转向的紧急避障系统硬件在环平台,其特征在于,所述的转向负载模拟平台包括平台基座(2)、以及安装在平台基座(2)上的减速器(8)和磁粉制动器(12);所述的执行器输出轴通过第一联轴器与第一加载轴一端相连接,第一加载轴另一端通过第二联轴器与减速器(8)输入轴相连接,减速器(8)输出轴通过第三联轴器与第二加载轴一端相连接,第二加载轴另一端通过第四联轴器与磁粉制动器(12)相连接。
5.根据权利要求4所述的一种基于电动转向的紧急避障系统硬件在环平台,其特征在于,所述的执行器采用电动循环球转向器,所述的电动循环球转向器输出轴通过第一联轴器与转向负载模拟平台的减速器输入轴连接,电动循环球转向器用于控制转向负载模拟平台的磁粉制动器(12)转动。
6.根据权利要求4所述的一种基于电动转向的紧急避障系统硬件在环平台,其特征在于,所述的第一联轴器采用法兰联轴器,第二联轴器、第三联轴器、第四联轴器采用梅花联轴器。
7.根据权利要求4所述的一种基于电动转向的紧急避障系统硬件在环平台,其特征在于,所述的第二加载轴通过轴承支架安装在平台基座上。
8.根据权利要求1所述的一种基于电动转向的紧急避障系统硬件在环平台,其特征在于,所述上位机与下位机中的模型运行模块采用以太网通信,所述下位机中的模型运行模块与dsp控制器采用can通信,所述下位机中的dsp控制器、模型运行模块与执行器中的mcu采用can通信。
9.根据权利要求1所述的一种基于电动转向的紧急避障系统硬件在环平台,其特征在于,所述的控制指令信息包括整车车速、目标方向盘转向指令角度、工作模式、指令转角有效位、命令系统状态、转向叠加扭矩信号、方向盘目标角速度、crc校验码;返回转向信息包括执行器中的mcu温度、对中状态、通讯life、故障码、电动转向电机状态、方向盘转角、电机助力扭矩、方向盘反馈角速度、转向盘转矩信号、控制器状态位、系统故障等级。
10.权利要求1所述的基于电动转向的紧急避障系统硬件在环平台的测试方法,其特征在于,包括:
技术总结
本发明公开了一种基于电动转向的紧急避障系统硬件在环平台及测试方法,属于电动汽车主动安全技术领域。在环平台由上位机、下位机、执行器和转向负载模拟平台组成。上位机负载监控各项数据、展示车辆行驶画面等,下位机用于运行车辆动力学模型和紧急避障模型,发送控制指令信息至执行器,执行器根据接收到的控制指令信息实现转向负载模拟平台的转向操作,并向DSP控制器和模型运行模块返回转向信息,在转向操作时通过对磁粉制动器扭矩的控制来实现转向电机在转向过程中的负载模拟。本发明提出的紧急避障系统硬件在环平台可以满足多种紧急避障模型的测试需求,采用虚拟整车模型与实际转向台架的虚实结合,极大提高测试的安全性。
技术研发人员:朱绍鹏,陈慧鹏,庾兴磊,裘杭锋,张文祥,何银行,高健
受保护的技术使用者:浙江大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!