多自移动设备避让方法、装置、自移动设备及存储介质与流程
本申请涉及人工智能,尤其涉及一种多自移动设备避让方法、装置、自移动设备及存储介质。
背景技术:
1、随着工作环境复杂度和任务难度的增加,多机器人系统的应用不断扩大。当多台机器人在场景中运行时,容易出现拥堵的现象。目前在拥堵路段中机器人的调度算法一般采用避让方案。实际应用中,在建好的地图上预先设置合适的避让点,当机器人在执行任务的过程中发生路径冲突时,低优先级的机器人会前往避让点以等待高优先级的机器人离开冲突路段后再继续执行任务。
2、但是,在多机器人的场景下,通过设置避让点的方式使得多机器人之间的协调与避障能力较差,导致机器人之间路径冲突,通行效率较低。
技术实现思路
1、本申请的多个方面提供一种多自移动设备避让方法、装置、自移动设备及存储介质,用以实现在多机器人的场景下,通过多机协同的方式,避免多机器人在运行过程的路径冲突,以提高机器人的通行效率。
2、第一方面,本申请实施例提供一种多自移动设备避让方法,所述方法包括:
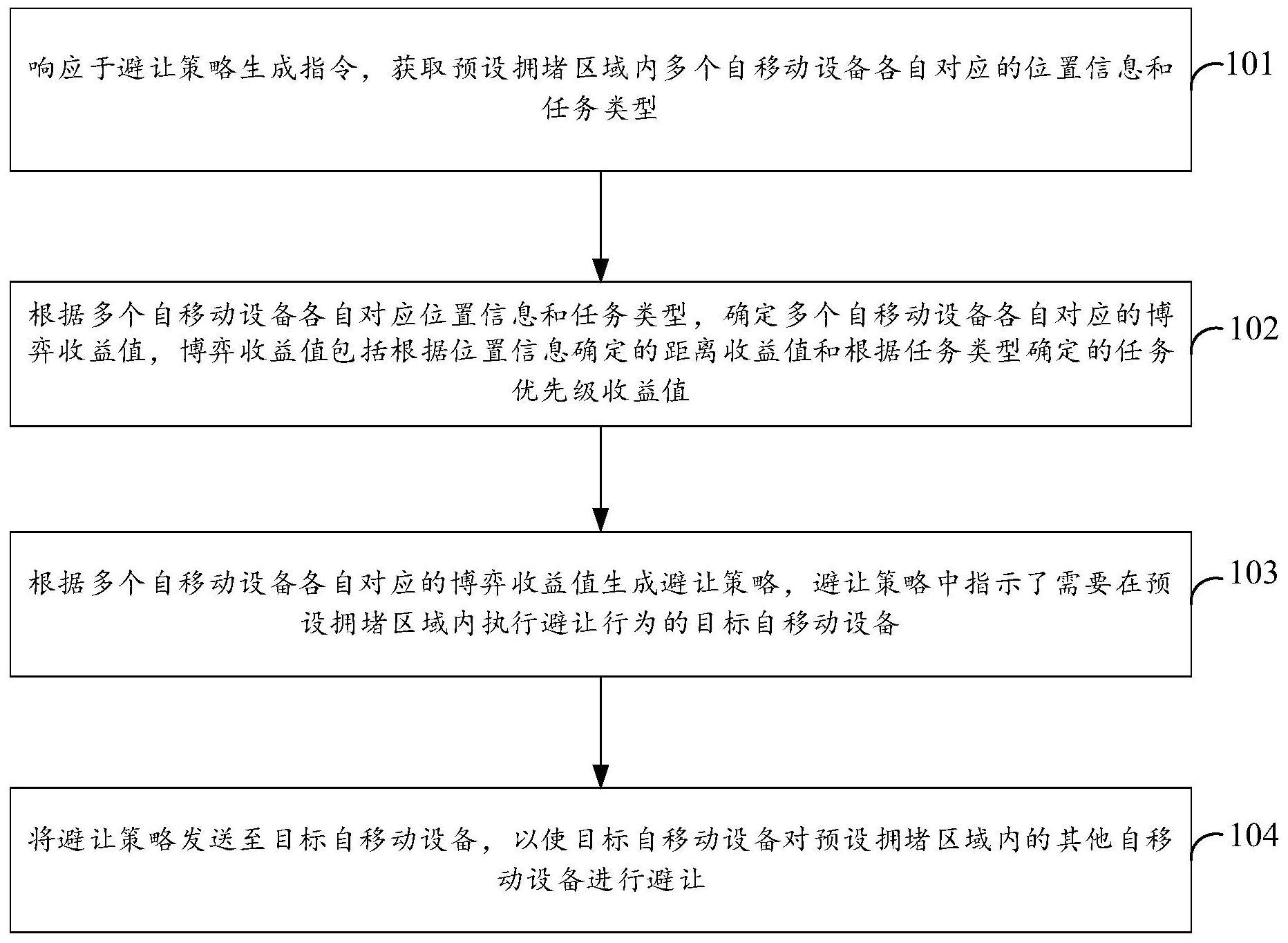
3、响应于避让策略生成指令,获取预设拥堵区域内多个自移动设备各自对应的位置信息和任务类型;
4、根据所述多个自移动设备各自对应位置信息和所述任务类型,确定所述多个自移动设备各自对应的博弈收益值,所述博弈收益值包括根据所述位置信息确定的距离收益值和根据所述任务类型确定的任务优先级收益值;
5、根据所述多个自移动设备各自对应的博弈收益值生成避让策略,所述避让策略中指示了需要在所述预设拥堵区域内执行避让行为的目标自移动设备;
6、将所述避让策略发送至所述目标自移动设备,以使所述目标自移动设备对所述预设拥堵区域内的其他自移动设备进行避让。
7、第二方面,本申请实施例提供一种多自移动设备避让装置,所述装置包括:
8、响应模块,用于响应于避让策略生成指令,获取预设拥堵区域内多个自移动设备各自对应的位置信息和任务类型;
9、确定模块,用于根据所述多个自移动设备各自对应位置信息和所述任务类型,确定所述多个自移动设备各自对应的博弈收益值,所述博弈收益值包括根据所述位置信息确定的距离收益值和根据所述任务类型确定的任务优先级收益值;
10、生成模块,用于根据所述多个自移动设备各自对应的博弈收益值生成避让策略,所述避让策略中指示了需要在所述预设拥堵区域内执行避让行为的目标自移动设备;
11、发送模块,用于将所述避让策略发送至所述目标自移动设备,以使所述目标自移动设备对所述预设拥堵区域内的其他自移动设备进行避让。
12、第三方面,本申请实施例提供一种自移动设备,包括:存储器、处理器、通信接口;其中,所述存储器上存储有可执行代码,当所述可执行代码被所述处理器执行时,使所述处理器执行如第一方面所述的多自移动设备避让方法。
13、第四方面,本申请实施例提供一种所述非暂时性机器可读存储介质上存储有可执行代码,当所述可执行代码被电子设备的处理器执行时,使所述处理器执行如第一方面所述的多自移动设备避让方法。
14、本申请实施例提供了一种多自移动设备避让方法,基于该方法,可以基于预设拥堵区域内多个自移动设备各自对应的位置信息和任务类型,生成避让策略,以实现在多机器人的场景下,避免多机器人在运行过程的路径冲突,以提高机器人的通行效率。在实际应用过程中,在获取到避让策略生成指令后,可以获取预设拥堵区域内多个自移动设备各自对应的位置信息和任务类型,根据多个自移动设备各自对应位置信息和任务类型,确定多个自移动设备各自对应的包括距离收益值和任务优先级收益值的博弈收益值。然后,就可以根据博弈收益值生成指示需要在预设拥堵区域内执行避让行为的目标自移动设备的避让策略。这样,就可以将避让策略发送至目标自移动设备,使目标自移动设备对预设拥堵区域内的其他自移动设备进行避让。
15、在本申请实施例提供的方案中,通过引入包括自移动设备的位置信息和任务类型的多种因素,生成指示需要在预设拥堵区域内执行避让行为的目标自移动设备的避让策略,能够实现在多机器人以及动态复杂环境的场景下,避免多机器人在运行过程的路径冲突,进而提高机器人的通行效率。
技术特征:
1.一种多自移动设备避让方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述多个自移动设备各自对应位置信息和所述任务类型,确定所述多个自移动设备各自对应的博弈收益值,包括:
3.根据权利要求1所述的方法,其特征在于,所述距离收益值包括目标距离收益值和安全距离收益值;
4.根据权利要求1至3中任一项所述的方法,其特征在于,所述距离收益值和所述任务优先级收益值各自对应有预设权重值;
5.根据权利要求4所述的方法,其特征在于,所述根据所述多个自移动设备各自对应的总收益值生成所述避让策略,包括:
6.根据权利要求4所述的方法,其特征在于,所述根据所述多个自移动设备各自对应的总收益值生成所述避让策略,包括:
7.根据权利要求1所述的方法,其特征在于,所述方法还包括:
8.一种多自移动设备避让装置,其特征在于,所述装置包括:
9.一种自移动设备,其特征在于,包括:存储器、处理器、通信接口;其中,所述存储器上存储有可执行代码,当所述可执行代码被所述处理器执行时,使所述处理器执行如权利要求1至7中任一项所述的多自移动设备避让方法。
10.一种非暂时性机器可读存储介质,其特征在于,所述非暂时性机器可读存储介质上存储有可执行代码,当所述可执行代码被电子设备的处理器执行时,使所述处理器执行如权利要求1至7中任一项所述的多自移动设备避让方法。
技术总结
本申请实施例提供一种多自移动设备避让方法、装置、自移动设备及存储介质。该方法包括:响应于避让策略生成指令,获取预设拥堵区域内多个自移动设备各自对应的位置信息和任务类型;根据多个自移动设备各自对应位置信息和任务类型,确定多个自移动设备各自对应的博弈收益值;根据多个自移动设备各自对应的博弈收益值生成避让策略,避让策略中指示了需要在预设拥堵区域内执行避让行为的目标自移动设备;将避让策略发送至目标自移动设备,以使目标自移动设备对预设拥堵区域内的其他自移动设备进行避让。基于该方法,能够避免多机器人在运行过程的路径冲突,以提高机器人的通行效率。
技术研发人员:马浩,刘彬彬,夏磊,郭振兴
受保护的技术使用者:科沃斯机器人股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!