基于5GS的无人机控制方法、系统和存储介质与流程
本发明涉及5g通信,尤其是一种基于5gs的无人机控制方法、系统和存储介质。
背景技术:
1、相关技术中,无人机daa研究主要集中在无人机之间使用pc5接口的直接通信方式在本地执行碰撞的检查和避让。这种方式能在一定程度上接近碰撞检查和避让问题。但是,随着无人机普及和应用,这种碰撞检测和避让方式无法获取更全面、深层的信息,从而无法选择最优的避让策略。并且,目前无人机的主要动力源来自锂聚合物电池,无人机需要尽可能减轻起飞重量以提高续航能力,因此无法携带较重的大容量电池,导致无人机的续航能力非常有限,而将daa功能设置在本地执行,则会增加无人机的能耗,从而降低无人机的续航能力。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种基于5gs的无人机控制方法、系统和存储介质,能够提供更加准确有效的避让策略,并提高无人机的电池续航能力。
2、一方面,本发明实施例提供了一种基于5gs的无人机控制方法,所述方法应用于5gs,所述方法包括以下步骤:
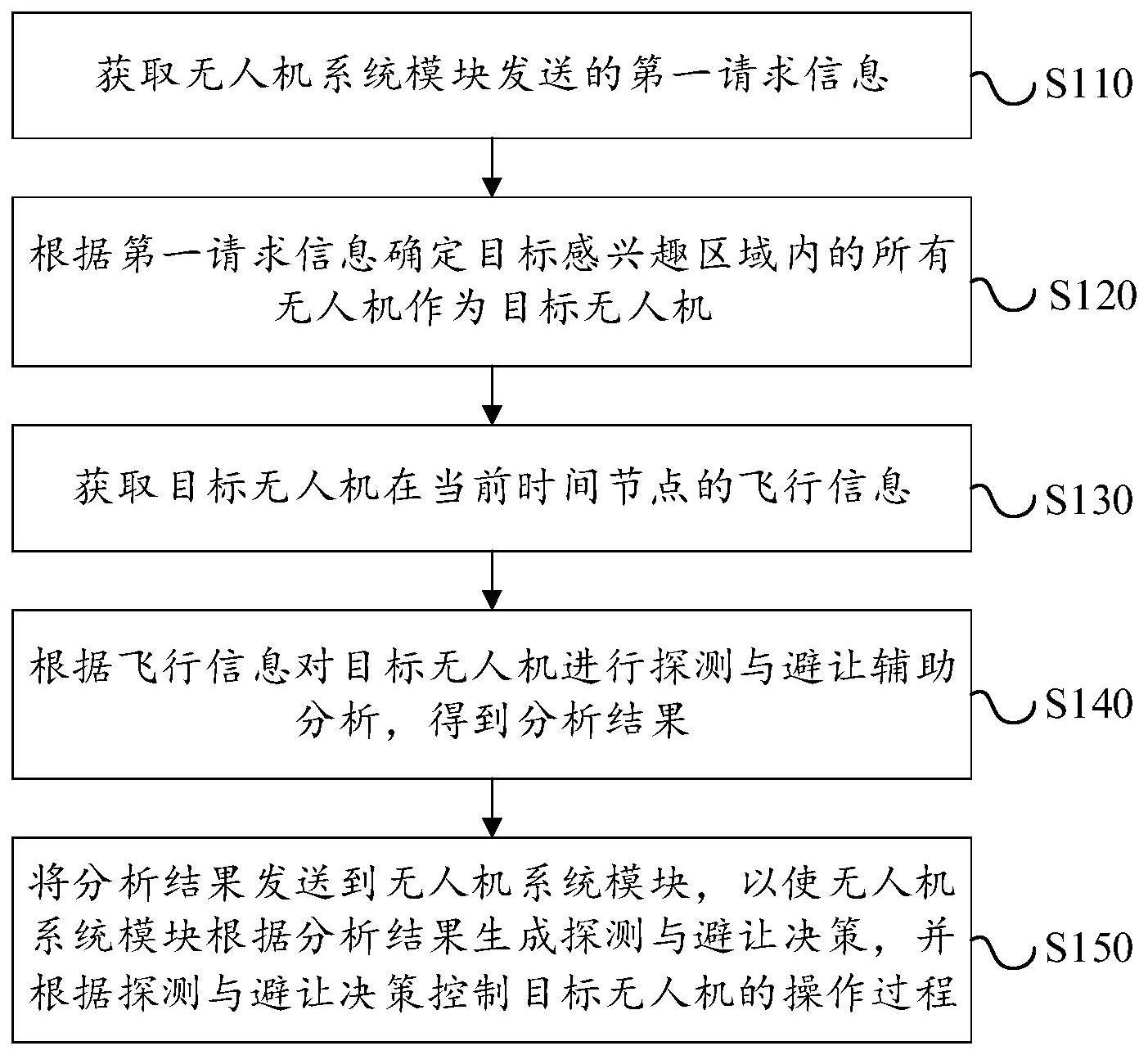
3、获取无人机系统模块发送的第一请求信息,所述第一请求信息用于请求进行探测与避让辅助分析,所述无人机系统模块包括无人机系统流量管理模块和无人机系统服务提供模块;
4、根据所述第一请求信息确定目标感兴趣区域内的所有无人机作为目标无人机;
5、获取所述目标无人机在当前时间节点的飞行信息,所述飞行信息包括飞行位置、飞行高度、飞行速度、飞行方向和电池电量;
6、根据所述飞行信息对所述目标无人机进行探测与避让辅助分析,得到分析结果;
7、将所述分析结果发送到所述无人机系统模块,以使所述无人机系统模块根据所述分析结果生成探测与避让决策,并根据所述探测与避让决策控制所述目标无人机的操作过程。
8、在一些实施例中,在所述获取无人机系统模块发送的第一请求信息之前,所述方法还包括以下步骤:
9、获取无人机系统模块发送的订阅请求;
10、根据所述订阅请求确定所述目标感兴趣区域。
11、在一些实施例中,所述根据所述订阅请求确定所述目标感兴趣区域,包括:
12、当所述订阅请求中分析的目标区域为经纬度范围;
13、将所述目标区域的信息映射为目标感兴趣区域,所述目标感兴趣区域由小区id或小区tai列表表示。
14、在一些实施例中,在所述将所述目标区域的信息映射为目标感兴趣区域后,所述方法还包括以下步骤:
15、获取无人机的网络能力;
16、根据所述无人机的网络能力和所述目标感兴趣区域确定所述5gs中的nwdaf。
17、在一些实施例中,所述根据所述第一请求信息确定目标感兴趣区域内的所有无人机作为目标无人机,包括:
18、根据所述第一请求信息监控所述目标感兴趣区域内的无人机变动信息,所述无人机变动信息用于表征无人机进入或离开所述目标感兴趣区域;
19、根据所述无人机变动信息更新所述目标感兴趣区域内的无人机列表;
20、根据更新后的所述无人机列表确定目标感兴趣区域内的所有无人机作为目标无人机。
21、在一些实施例中,所述根据所述飞行信息对所述目标无人机进行探测与避让辅助分析,得到分析结果,包括:
22、根据所述当前时间节点的飞行信息预测所述目标无人机的下一时间节点的飞行信息;
23、确定所述下一时间节点的飞行信息的预测置信度;
24、根据所述预测置信度生成探测与避让分析结果。
25、在一些实施例中,所述获取所述目标无人机在当前时间节点的飞行信息,包括:
26、以预设时间周期获取目标无人机在当前时间节点的飞行信息。
27、另一方面,本发明实施例提供了一种基于5gs的无人机控制系统,所述系统应用于5gs,所述系统包括:
28、第一模块,用于获取无人机系统模块发送的第一请求信息,所述第一请求信息用于请求进行探测与避让辅助分析,所述无人机系统模块包括无人机系统流量管理模块和无人机系统服务提供模块;
29、第二模块,用于根据所述第一请求信息确定目标感兴趣区域内的所有无人机作为目标无人机;
30、第三模块,用于获取所述目标无人机在当前时间节点的飞行信息,所述飞行信息包括飞行位置、飞行高度、飞行速度、飞行方向和电池电量;
31、第四模块,用于根据所述飞行信息对所述目标无人机进行探测与避让辅助分析,得到分析结果;
32、第五模块,用于将所述分析结果发送到所述无人机系统模块,以使所述无人机系统模块根据所述分析结果生成探测与避让决策,并根据所述探测与避让决策控制所述目标无人机的操作过程。
33、另一方面,本发明实施例提供了一种基于5gs的无人机控制系统,包括:
34、至少一个存储器,用于存储程序;
35、至少一个处理器,用于加载所述程序以执行所述的基于5gs的无人机控制方法。
36、另一方面,本发明实施例提供了一种存储介质,其中存储有计算机可执行的程序,所述计算机可执行的程序被处理器执行时用于实现所述的基于5gs的无人机控制方法。
37、本发明实施例提供的一种基于5gs的无人机控制方法,具有如下有益效果:
38、本实施例通过应用于5gs,从而可以利用5gs的低延迟、高容量和高可靠性特定,收集目标感兴趣区域内所有无人机的飞行信息,并根据飞行信息对目标无人机进行探测与避让辅助分析后,在将分析结果发送到无人机系统模块,以使无人机系统模块根据分析结果生成探测与避让决策,并根据探测与避让决策控制目标无人机的操作过程,从而可以从宏观上调节目前区域内无人机的飞行过程,有效且准确地完成避让过程,同时降低无人机自身的能耗,有效提高无人机的电池续航能力。
39、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种基于5gs的无人机控制方法,其特征在于,所述方法应用于5gs,所述方法包括以下步骤:
2.根据权利要求1所述的一种基于5gs的无人机控制方法,其特征在于,在所述获取无人机系统模块发送的第一请求信息之前,所述方法还包括以下步骤:
3.根据权利要求2所述的一种基于5gs的无人机控制方法,其特征在于,所述根据所述订阅请求确定所述目标感兴趣区域,包括:
4.根据权利要求3所述的一种基于5gs的无人机控制方法,其特征在于,在所述将所述目标区域的信息映射为目标感兴趣区域后,所述方法还包括以下步骤:
5.根据权利要求1所述的一种基于5gs的无人机控制方法,其特征在于,所述根据所述第一请求信息确定目标感兴趣区域内的所有无人机作为目标无人机,包括:
6.根据权利要求1所述的一种基于5gs的无人机控制方法,其特征在于,所述根据所述飞行信息对所述目标无人机进行探测与避让辅助分析,得到分析结果,包括:
7.根据权利要求1所述的一种基于5gs的无人机控制方法,其特征在于,所述获取所述目标无人机在当前时间节点的飞行信息,包括:
8.一种基于5gs的无人机控制系统,其特征在于,所述系统应用于5gs,所述系统包括:
9.一种基于5gs的无人机控制系统,其特征在于,包括:
10.一种存储介质,其特征在于,其中存储有计算机可执行的程序,所述计算机可执行的程序被处理器执行时用于实现如权利要求1-7任一项所述的基于5gs的无人机控制方法。
技术总结
本发明公开了一种基于5GS的无人机控制方法、系统和存储介质,可广泛应用于5G通信技术领域。本发明通过应用于5GS,从而可以利用5GS的低延迟、高容量和高可靠性特定,收集目标感兴趣区域内所有无人机的飞行信息,并根据飞行信息对目标无人机进行探测与避让辅助分析后,在将分析结果发送到无人机系统模块,以使无人机系统模块根据分析结果生成探测与避让决策,并根据探测与避让决策控制目标无人机的操作过程,从而可以从宏观上调节目前区域内无人机的飞行过程,有效且准确地完成避让过程,同时降低无人机自身的能耗,有效提高无人机的电池续航能力。
技术研发人员:谢涵
受保护的技术使用者:广州爱浦路网络技术有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!