基于反复博弈的无人飞行器动态障碍规避方法与流程
本发明涉及无人飞行器,特别涉及一种基于反复博弈的无人飞行器动态障碍规避方法、电子设备和存储介质。
背景技术:
1、无人飞行器在飞行过程中能够通过传感器来感测周围环境信息,为了保障无人飞行器能够自主避开障碍物,需要设计适合的避障方法,使得无人飞行器根据障碍物位置、障碍物类型、自身位置等信息进行避障机动,进而保证无人飞行器在安全的前提下迅速避开障碍物。是否具备避障能力,是判断无人飞行器自主能力的关键指标之一。
2、现有的避障算法在较复杂的环境下的避障效果不理想,对环境的适应性较差,所以如何提高无人飞行器避障算法的性能是一个至关重要的问题。
技术实现思路
1、为了解决现有技术存在的问题,本发明提供一种基于反复博弈的无人飞行器动态障碍规避方法,使得无人飞行器系统在面对移动障碍、移动目标时能够实时进行避障机动,较快地为无人飞行器计算出性能较优的运动路径,保障无人飞行器安全运行到各自的目标点。
2、为实现上述目的,本发明提供的一种基于反复博弈的无人飞行器动态障碍规避方法,包括以下步骤:
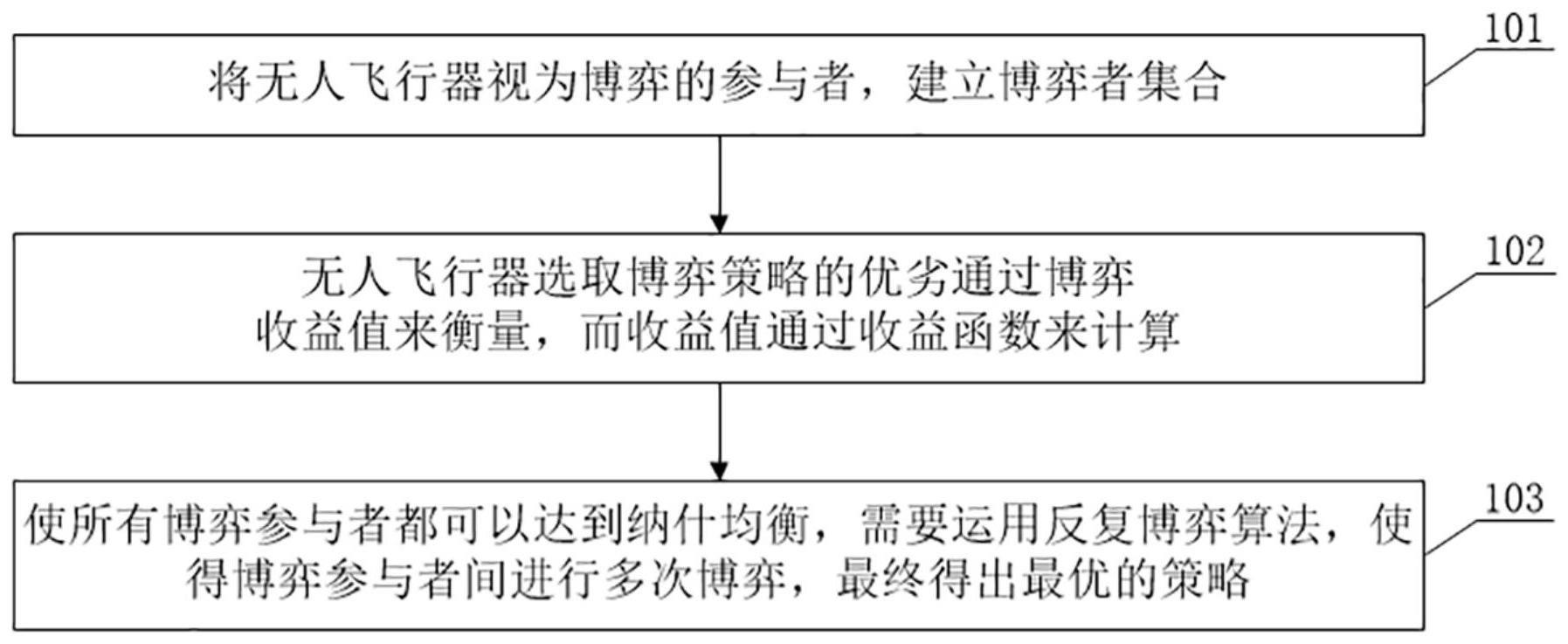
3、将无人飞行器作为博弈的参与者,建立博弈参与者集合;
4、根据所述博弈参与者之间的状态计算博弈收益值,通过计算博弈收益值衡量无人飞行器选取博弈策略的优劣;
5、使博弈参与者在反复博弈过程中快速收敛到最优策略,根据博弈参与者的决策更新混合策略,根据混合策略与博弈收益进行决策,使得博弈参与者的收益达到纳什均衡并选择对应的避障策略。
6、进一步地,所述将无人飞行器作为博弈的参与者,建立博弈参与者集合的步骤,还包括,
7、假设无人飞行器运行时遇到h个障碍物obh(h=1,…,h),无人飞行器当前位置坐标为(xr,yr),每个障碍物距离无人飞行器最近点的坐标为(xh,yh),博弈参与者集合为a,将无人飞行器放入博弈参与者集合a;
8、计算无人飞行器与障碍物的距离,当满足公式1时则障碍物进入无人飞行器的安全范围,与无人飞行器进行博弈避障;
9、
10、其中,dsafe为安全距离,当无人飞行器距障碍物的距离小于等于dsafe时将障碍物obh放入博弈参与者集合a,进行避障机动;
11、在进行避障时,将工作环境中出现在无人飞行器的安全范围内的原始障碍物视为博弈参与者。
12、进一步地,还包括,
13、博弈参与者选择的策略集合包含四种策略集合;
14、第一策略集合为博弈参与者改变自身的速度,并保持其他状态不变;
15、第二策略集合为博弈参与者改变自身的运行方向,并保持其他状态不变;
16、第三策略集合为博弈参与者运行速度、运行方向均保持不变;
17、第四策略集合为停止策略,所述博弈参与者保持当前位置不变。
18、进一步地,所述根据所述博弈参与者之间的状态计算博弈收益值,通过计算博弈收益值衡量无人飞行器选取博弈策略的优劣的步骤,还包括,
19、假设共有a个博弈参与者,其收益计算公式为:
20、
21、其中,r为判断策略是否保证无人飞行器安全的系数,当所选取的策略可以保证安全时r=1,当不能保证安全时r=0;dsafe为无人飞行器的安全距离范围;aved为ai与其他博弈参与者之间距离的平均值;mind为ai与其他博弈参与者之间距离的最小值;ai为博弈参与者i所采取的策略;a-i为除了博弈参与者i以外的博弈参与者所采取的策略;x(ai)为不同策略的消耗值。
22、进一步地,所述使博弈参与者在博弈过程中快速收敛到最优策略,根据博弈参与者的决策更新混合策略,根据混合策略与博弈收益进行决策,使得博弈参与者的收益达到纳什均衡并选择对应的避障策略的步骤,还包括,
23、设反复博弈的次数为t,当前博弈次数为t,博弈参与者可选策略为n个,初始化博弈参与者ai的混合策略,t=1且博弈参与者ai的初始概率为:
24、
25、其中,n为博弈参与者可选的策略个数;分别为博弈参与者在初始时刻选择第1个、第2个、…、第n个策略的概率。
26、进一步地,还包括,
27、将混合策略与每次迭代博弈参与者的决策进行结合,使博弈参与者ai的概率随着迭代次数的变化而变化,计算公式为:
28、
29、其中,参数函数i(τi)(i=1,2,…,n)为决策记录函数,包括记录前t-1次迭代中选择当前策略的次数和不选择当前策略的次数,计算公式为:
30、
31、其中,pri为博弈参与者ai的博弈优先级;β为大于0的常数,用于记录博弈参与者选择当前或其他策略的次数;当博弈参与者为静态障碍物时,pr为0。
32、进一步地,还包括,
33、博弈参与者初始优先级pr为0,根据优先级计算公式更改优先级,所述优先级计算公式为:
34、
35、其中,li为博弈参与者ai到目标点的距离,dpr为判断优先级的距离,当博弈参与者的优先级为1时,选择第三策略集合。
36、更进一步地,每个所述博弈参与者的信息包括,参与者当前位置(i=1,2,…,a),运行速度运行方向与x轴的夹角θ,优先级pr。
37、为实现上述目的,本发明还提供一种电子设备,包括存储器和处理器,所述存储器上储存有在所述处理器上运行的程序,所述处理器运行所述程序时执行上述的基于反复博弈的无人飞行器动态障碍规避方法的步骤。
38、为实现上述目的,本发明还提供一种计算机可读存储介质,其上存储有计算机指令,所述计算机指令运行时执行上述的基于反复博弈的无人飞行器动态障碍规避方法的步骤。
39、本发明的基于反复博弈的无人飞行器动态障碍规避方法,具有以下有益效果:
40、采用了反复博弈的方式进行避障策略的选择,每个博弈参与者都根据混合策略来选取自身应采取的行为,使得各个博弈者均能快速收敛到最优策略,安全可靠,能适应多种复杂环境,能够有效地解决无人飞行器系统的协同动态障碍规避问题,进而高效且安全的避开所有障碍物。
41、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。
技术特征:
1.基于反复博弈的无人飞行器动态障碍规避方法,包括以下步骤:
2.根据权利要求1所述的基于反复博弈的无人飞行器动态障碍规避方法,其特征在于,所述将无人飞行器作为博弈的参与者,建立博弈参与者集合的步骤,还包括,
3.根据权利要求2所述的基于反复博弈的无人飞行器动态障碍规避方法,其特征在于,还包括,
4.根据权利要求1所述的基于反复博弈的无人飞行器动态障碍规避方法,其特征在于,所述根据所述博弈参与者之间的状态计算博弈收益值,通过计算博弈收益值衡量无人飞行器选取博弈策略的优劣的步骤,还包括,
5.根据权利要求1所述的基于反复博弈的无人飞行器动态障碍规避方法,其特征在于,所述使博弈参与者在博弈过程中快速收敛到最优策略,根据博弈参与者的决策更新混合策略,根据混合策略与博弈收益进行决策,使得博弈参与者的收益达到纳什均衡并选择对应的避障策略的步骤,还包括,
6.根据权利要求5所述的基于反复博弈的无人飞行器动态障碍规避方法,其特征在于,还包括,
7.根据权利要求6所述的基于反复博弈的无人飞行器动态障碍规避方法,其特征在于,还包括,
8.根据权利要求1-7所述的基于反复博弈的无人飞行器动态障碍规避方法,其特征在于,每个所述博弈参与者的信息包括,参与者当前位置运行速度运行方向与x轴的夹角θ,优先级pr。
9.一种电子设备,其特征在于,包括存储器和处理器,所述存储器上储存有在所述处理器上运行的程序,所述处理器运行所述程序时执行权利要求1-8任一项所述的基于反复博弈的无人飞行器动态障碍规避方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机指令,其特征在于,所述计算机指令运行时执行权利要求1-8任一项所述的基于反复博弈的无人飞行器动态障碍规避方法的步骤。
技术总结
本发明提供一种基于反复博弈的无人飞行器动态障碍规避方法,包括以下步骤:通过将无人飞行器作为博弈的参与者,建立博弈参与者集合;根据所述博弈参与者之间的状态计算博弈收益值,通过计算博弈收益值衡量无人飞行器选取博弈策略的优劣;使博弈参与者在反复博弈过程中快速收敛到最优策略,根据博弈参与者的决策更新混合策略,根据混合策略与博弈收益进行决策,使得博弈参与者的收益达到纳什均衡并选择对应的避障策略。本发明基于反复博弈的无人飞行器动态障碍规避方法,使得无人飞行器系统在面对移动障碍、移动目标时能够实时进行避障机动,较快地为无人飞行器计算出性能较优的运动路径,保障无人飞行器安全运行到各自的目标点。
技术研发人员:武应华,赵国宏,焦巍,谢天宇
受保护的技术使用者:中国人民解放军96901部队
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!