一种钻孔立杆设备的智能控制系统及其控制方法与流程
本发明涉及工程,特别涉及一种钻孔立杆设备的智能控制系统及其控制方法。
背景技术:
1、在电缆通讯线路架设使用的水泥杆的钻孔预埋施工时,现有技术一般采用钻孔机钻孔定位、起重机配合吊入水泥杆置入深孔、立杆调整扶正、杆体周围人工填土、机具夯实等步骤,这种施工方式通常需要多人多机配合、操纵工序繁琐、且施工效率低,已经不能够满足高效快速的市场需求。因此,需要开发一种兼具钻孔立杆功能的施工设备、且能实现钻孔、立杆、埋土、夯实等完整工序操作的智能化控制系统,解决目前立杆预埋施工过程中操作繁琐复杂、作业效率低、设备投入成本高和人员劳动强度大的问题。
技术实现思路
1、本发明的目的在于针对现有技术的不足而设计一种钻孔立杆设备的智能控制系统及其控制方法,采用现有挖机为主机,增加钻杆、抓具等机械执行设备,通过无线遥控器用于操作人员远程手持操作、发射控制信号,信号处理机接收、处理无线遥控器发出的信号、向工作单元的执行机构输出,实现设备钻孔、立杆、填土的一体化作业功能的智能控制。
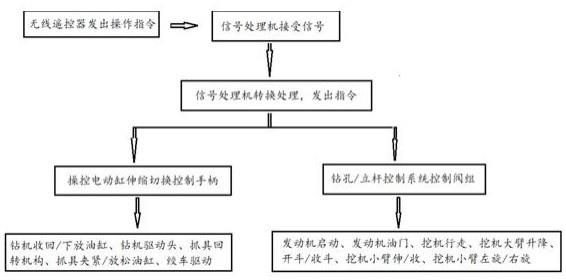
2、本发明解决其技术问题所采用的一种钻孔立杆设备的智能控制系统,包括无线遥控器、信号处理机。无线遥控器用于操作人员远距离手持操作、发射操作员的控制信号;信号处理机用于接收操作员控制无线遥控器的信号,对此信号进行接收处理,并输出到设备的执行机构,实现设备的具体控制功能。
3、所述无线遥控器,包括设备的发动机启停控制开关、发动机油门控制旋钮、行走控制开关、整车回转开关、大臂控制开关、小臂控制开关、钻机下放/收回控制开关、钻机旋转控制开关、抓具夹紧/放松开关、抓斗开合控制开关、抓具旋转控制开关、冲击夯控制开关、绞车控制开关。
4、所述无线遥控器,还包括电源开关、无线信号输出模块、电源指示灯、锁定开关/锁定指示灯、急停开关;所述电源开关,用于打开无线遥控器电源;所述无线信号输出模块,用于打开电源后,有效输出控制信号;所述锁定开关,用于无线遥控器打开电源、解锁后,无线遥控器上各个开关/按钮可正常使用;所述急停开关,用于当发生紧急情况时,按下此开关可停止设备的一切动作,保护设备和周边工作人员的安全。
5、所述信号处理机,包括无线接收模块和信号处理模块;所述无线接收模块,用于对无线遥控器开关输出的控制功能进行信号接收;所述信号处理模块,用于对无线接收模块接收的信号进行转换、处理以及输出控制。
6、所述无线遥控器和信号处理机均设有断电保护器。
7、所述对执行机构的控制动作,通过对现有挖机的液压回路改造、信号处理机的电信号接入来实现,达到现有挖机功能控制、钻孔立杆功能的相关操作的无线遥控控制。
8、另外,本发明还提供了利用上述钻孔立杆设备的智能控制系统及其控制方法,包括以下步骤:
9、1)无线遥控器与信号处理机连接调试
10、a)打开信号处理机的远程开关搜索无线信号,此时工作灯点亮;b)打开无线遥控器的电源开关,该无线遥控器的无线发射模块通电,电源灯点亮,信号灯闪烁,完成与信号处理机的无线连接;c)切换无线遥控器的锁定/解锁开关到解锁位置,该无线遥控器上的各个操作动作解锁可用;d)打开发动机启动开关,发动机点火启动;旋转手油门旋钮,右旋加大油门,左旋减小油门。
11、2)挖机行走至工位进行钻孔作业的控制
12、a)操纵无线遥控器的右履带前进/后退手柄,实现挖机的右前方向行走,操作左履带前进/后退手柄,实现挖机的左前方向行走; 同时操纵右履带前进/后退手柄和左履带前进/后退,可实现挖机同时前进或后退,以保证其准确到达钻孔立杆工位;b)操纵钻机左旋/右旋手柄,实现钻机的左方向旋转或右方向旋转,旋转速度随钻机左旋/右旋手柄的偏移位置而变化;c)操纵钻机下放/收回手柄,实现钻孔过程中螺旋钻具下放和收回,下放和收回速度随钻机下放/收回手柄的偏移位置而变化;d)操纵大臂升降、收斗/开斗手柄,实现挖机大臂的位置调整,操作小臂伸缩、整车左转/右转手柄,实现挖机小臂的位置调整。
13、3)抓具抓杆、旋转、立杆和夯实土体的控制
14、a)操纵无线遥控器的抓具夹紧/放松手柄,实现抓具对杆体的夹紧和放松操作;b)操纵抓具左旋/右旋手柄,实现抓具夹持杆体后进行左方向旋转或右方向旋转;c)在杆体旋转至垂直状态时,操纵无线遥控器的抓具夹紧/放松手柄3,松开抓具的斗瓣,同时操纵绞车放绳/收绳手柄使绞车放出钢丝绳钩,这样松开的杆体缓缓下放进入钻孔完成立杆操作;绞车的钢丝绳钩放出或收紧速度随绞车放绳/收绳手柄的偏移位置而变化;d)操纵冲击夯手柄,驱动冲击夯运行,对杆体竖直立杆后周围的回填土进行冲击振动夯实;e)操纵发动机停止开关,关闭挖机发动机。
15、与现有技术相比,本发明具有以下有益效果:
16、采用现有挖机为主机,增加钻杆、抓具等机械执行设备,通过操纵无线遥控器上的控制开关或按钮,信号处理机接收来自无线遥控器的控制信号,直接驱动设备的相应执行动作,以实现设备钻孔、立杆埋设、填土夯实的一体化作业功能,有效提高钻孔立杆的施工效率,降低操作人员的劳动强度,充分体现工程施工机械化、智能化的发展趋势。
技术特征:
1.一种钻孔立杆设备的智能控制系统,其特征在于,包括实现对现有挖机改造及控制钻孔立杆的体化功能;所述对现有挖机的改造,包括对现有挖机功能控制,所述现有挖机功能包括发动机启停、发动机油门控制、行走控制、回转控制、大臂控制、小臂控制、抓斗开合控制。
2.根据权利要求1所述的钻孔立杆设备的智能控制系统,还包括钻孔立杆功能控制;所述钻孔立杆功能控制,包括对钻机旋转、钻机下放收回、抓具夹紧放松、抓具旋转、绞车收绳/放绳的控制。
3.根据权利要求1和2所述的控制系统的相关操作,实现远程无线智能控制,其特征在于,包括无线遥控器和信号处理机;所述无线遥控器用于操作人员远距离手持操作、发射操作员的控制需求信号;所述信号处理机用于接收操作员控制无线遥控器的信号、对此信号转换处理,并输出到设备的执行机构实现具体控制动作。
4.根据权利要求3所述的无线遥控器包括无线发射模块、单挡位开关、双挡位开关、单挡位比例控制手柄,双挡位比例控制手柄,指示灯、急停开关,模拟量旋钮开关;所述信号处理机包括电源模块、无线接收模块、主控制模块、指示灯等执行显示元器件。
5.根据权利要求书3所述的钻孔立杆设备的智能控制系统,其特征在于,所述无线遥控器和信号处理机均设有断电保护器。
6.根据权利要求3所述的对执行机构的控制动作,通过对现有挖机的液压系统增加钻孔立杆控制液压控制回路、增加远程无线遥控功能、增加信号处理机的控制信号来实现,达到现有挖机功能控制、钻孔立杆功能的相关操作控制。
7.利用权利要求1-6任何一项所述的控制方法,包括以下步骤:
技术总结
一种钻孔立杆设备的智能控制系统,包括无线遥控器、信号处理机、执行机构控制系统等,无线遥控器发送设备功能信号给信号处理机,信号处理机接收遥控器发出的指令信号后执行设备的相关动作,达到控制发动机启停、设备行走、设备回转、大臂升降、小臂伸缩、钻机旋转、钻机下放/收回、绞车收绳/放绳、抓具夹紧/放松、抓具旋转、冲击夯驱动等设备动作的功能需要。利用钻孔立杆设备的智能控制系统的控制方法,包括无线遥控器与信号处理机连接调试、挖机行走至工位进行钻孔作业的控制、抓具抓杆、旋转、立杆和夯实土体的控制等步骤。本发明实现钻孔、立杆、填土夯实一体化作业的智能化控制,具有断电停机、无信号停机、紧急停机等自身保护功能。
技术研发人员:王大元,李昱文,张德梅,龚秀刚,王汉宝,段国平,王晓庆,李秀娟,李赛赛
受保护的技术使用者:上海工程机械厂有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!