机器人充电方法、装置、机器人及机器人系统与流程
本申请涉及智能机器人,更具体的说,是涉及一种机器人充电方法、装置、机器人及机器人系统。
背景技术:
1、随着科技的进步,越来越多的智能机器人应用于人们的工作、生活中。示例如,智能扫地机器人、搬运机器人、陪伴机器人等。
2、这些智能机器人可以实现既定的操作,如自主移动、清洁、搬运、照明等,给用户带来了极大的便利。一般性的,智能机器人都会内置电源模块,从而可以实现脱离充电装置开展工作,但是由于本体尺寸的限制,内置的电源模块供电能力有限,所以在电源模块的电量耗尽之前,需要机器人精准的回到充电桩实现自主充电,从而彻底解放用户的双手。
3、现有技术中一般在充电桩表面设置特征标识,如反光条等。智能机器人移动时感知周围环境数据,当检测到感知的环境数据与特征标识匹配时,即认定发现了充电桩,进而朝充电桩移动进行充电。但是智能机器人所处的作业环境可能复杂多变,环境中经常会出现与充电桩表面设置的特征标识类似的物品,从而导致智能机器人误判充电桩位置。
技术实现思路
1、鉴于上述问题,提出了本申请以便提供一种机器人充电方法、装置、机器人及机器人系统,以实现在兼顾搜寻充电桩的效率的同时,提升充电桩位置的检查准确度。具体方案如下:
2、第一方面,提供了一种机器人充电方法,包括:
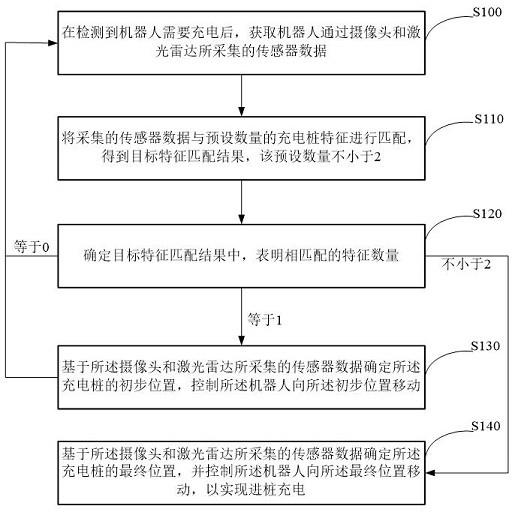
3、在检测到机器人需要充电后,获取机器人通过摄像头和激光雷达所采集的传感器数据;
4、将所述传感器数据与预设数量的充电桩特征进行匹配,得到目标特征匹配结果,所述预设数量不小于2;
5、若所述目标特征匹配结果中,表明相匹配的特征数量等于1,则基于所述传感器数据确定所述充电桩的初步位置,控制所述机器人向所述初步位置移动,并返回执行获取机器人通过摄像头和激光雷达所采集的传感器数据的步骤;
6、若所述目标特征匹配结果中,表明相匹配的特征数量不小于2,则基于所述传感器数据确定所述充电桩的最终位置,并控制所述机器人向所述最终位置移动,以实现进桩充电。
7、第二方面,提供了一种机器人充电装置,包括:
8、传感器数据获取单元,用于在检测到机器人需要充电后,获取机器人通过摄像头和激光雷达所采集的传感器数据;
9、特征匹配单元,用于将所述传感器数据与预设数量的充电桩特征进行匹配,得到目标特征匹配结果,所述预设数量不小于2;
10、初步位置确定单元,用于若所述目标特征匹配结果中,表明相匹配的特征数量等于1,则基于所述传感器数据确定所述充电桩的初步位置,控制所述机器人向所述初步位置移动,并返回执行所述传感器数据获取单元获取机器人通过摄像头和激光雷达所采集的传感器数据的步骤;
11、最终位置确定单元,用于若所述目标特征匹配结果中,表明相匹配的特征数量不小于2,则基于所述传感器数据确定所述充电桩的最终位置,并控制所述机器人向所述最终位置移动,以实现进桩充电。
12、第三方面,提供了一种机器人,包括:机器人本体,设置于机器人本体上的电源模块、摄像头、激光雷达、存储器和处理器;
13、所述存储器,用于存储程序;
14、所述处理器,用于执行所述程序,实现如上所述的机器人充电方法的各个步骤。
15、第四方面,提供了一种机器人系统,包括上述机器人及充电桩;
16、所述充电桩包括充电槽,所述充电槽内设置有供电接口,用于与机器人上的充电接口配合实现对机器人充电;
17、所述充电槽内部设置有至少两种逆反射系数不同的材料。
18、借由上述技术方案,本申请方案在检测到机器人需要充电后,获取机器人通过摄像头和激光雷达所采集的传感器数据,并将传感器数据与预设数量的充电桩特征进行匹配,得到目标特征匹配结果,该预设数量不小于2,也即,本申请设计了至少2种充电桩特征。若目标特征匹配结果中,表明相匹配的特征数量等于1,则可以基于采集的传感器数据确定充电桩的初步位置,也即确定充电桩的大概位置,作为搜寻充电桩的路径规划引导,在此基础上控制机器人向初步位置移动,并在移动过程中或移动到初步位置后重复执行上述传感器数据采集、充电桩特征匹配的步骤,从而保证了寻桩的效率。若目标特征匹配结果中,表明相匹配的特征数量不小于2,则可以基于采集的传感器数据确定充电桩的最终位置,控制机器人向最终位置移动,以实现进桩充电。显然,本申请通过2个以上的充电桩特征比对来核实充电桩的身份,确定充电桩的最终位置,保证了充电桩的识别准确率,避免了误判。
19、综上可知,本申请设计了2种以上的充电桩特征,通过特征匹配,若存在1个特征是匹配的,则确定充电桩的初步位置作为搜索充电桩的路径规划引导,在机器人到达初步位置的过程中或到达初步位置后不断再去匹配更多的充电桩特征来提升充电桩识别的置信度,在确定有2个以上的特征匹配时,可以确定充电桩的最终位置,如此既兼顾了搜寻效率又兼顾了充电桩的识别准确率。
技术特征:
1.一种机器人充电方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述预设数量的充电桩特征包括充电桩的外观特征和充电桩的充电槽内部特征两种类型特征;
3.根据权利要求2所述的方法,其特征在于,所述充电槽内部特征包括充电槽内部结构特征和充电槽内部材质特征;
4.根据权利要求2所述的方法,其特征在于,
5.根据权利要求2所述的方法,其特征在于,所述将所述摄像头采集的传感器数据与所述充电桩的外观特征进行匹配,包括:
6.根据权利要求3所述的方法,其特征在于,所述充电桩的充电槽内部设置有至少两种逆反射系数不同的材料;
7.根据权利要求1-6任一项所述的方法,其特征在于,在检测到机器人需要充电后,获取机器人通过摄像头和激光雷达所采集的传感器数据,包括:
8.根据权利要求7所述的方法,其特征在于,所述获取机器人在移动过程通过摄像头和激光雷达所采集的传感器数据,包括:
9.根据权利要求1-6任一项所述的方法,其特征在于,若所述目标特征匹配结果中,表明相匹配的特征数量等于1,该方法还包括:
10.一种机器人充电装置,其特征在于,包括:
11.一种机器人,其特征在于,包括:机器人本体,设置于机器人本体上的电源模块、摄像头、激光雷达、存储器和处理器;
12.一种机器人系统,其特征在于,包括如权利要求11所述的机器人及充电桩;
技术总结
本申请公开了一种机器人充电方法、装置、机器人及机器人系统,在检测到机器人需要充电后,获取机器人通过摄像头和激光雷达所采集的传感器数据,并将传感器数据与预设数量的充电桩特征进行匹配,该预设数量不小于2,得到目标特征匹配结果,若目标特征匹配结果中表明相匹配的特征数量等于1,则基于采集的传感器数据确定充电桩的初步位置,控制机器人向初步位置移动,移动过程或移动到初步位置后重复上述数据采集、特征匹配的步骤。若相匹配的特征数量不小于2,则基于采集的传感器数据确定充电桩的最终位置,控制机器人向最终位置移动,以实现进桩充电。本申请方案既兼顾了搜寻效率又兼顾了充电桩的识别准确率。
技术研发人员:张鹏,杨瑶,顾涵琦
受保护的技术使用者:科大讯飞股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!