一种实时跟踪的前瞻路径规划系统、方法及装置
本发明涉及路径规划,具体涉及一种实时跟踪的前瞻路径规划系统、方法及装置。
背景技术:
1、目前,轨迹跟踪识别领域中,常用的都是3d相机,利用3d数据才可以采集足够的数据量,再使用对应识别算法辅助该工艺的路径规划。但当前主流的轨迹跟踪产品为了较高的识别精度,视距都比较短,所以视野较小。此外,主流的轨迹跟踪产品都是跟末端执行器固定连接的,因此,当遇到轨迹曲率较大的位置或者需要变换末端执行器姿态的时候,为了保持末端执行器的工艺要求,轨迹会超出跟踪仪的视野。所以当前的跟踪仪均存在适用范围窄的难点。无法满足智能制造大趋势下的智能化、自动化要求。
技术实现思路
1、针对所述缺陷,本发明实施例公开了一种实时跟踪的前瞻路径规划系统、方法及装置,其对结构进行创新,使跟踪仪在短视距、窄视野的情况下保持高识别精度和提高有效观察范围。
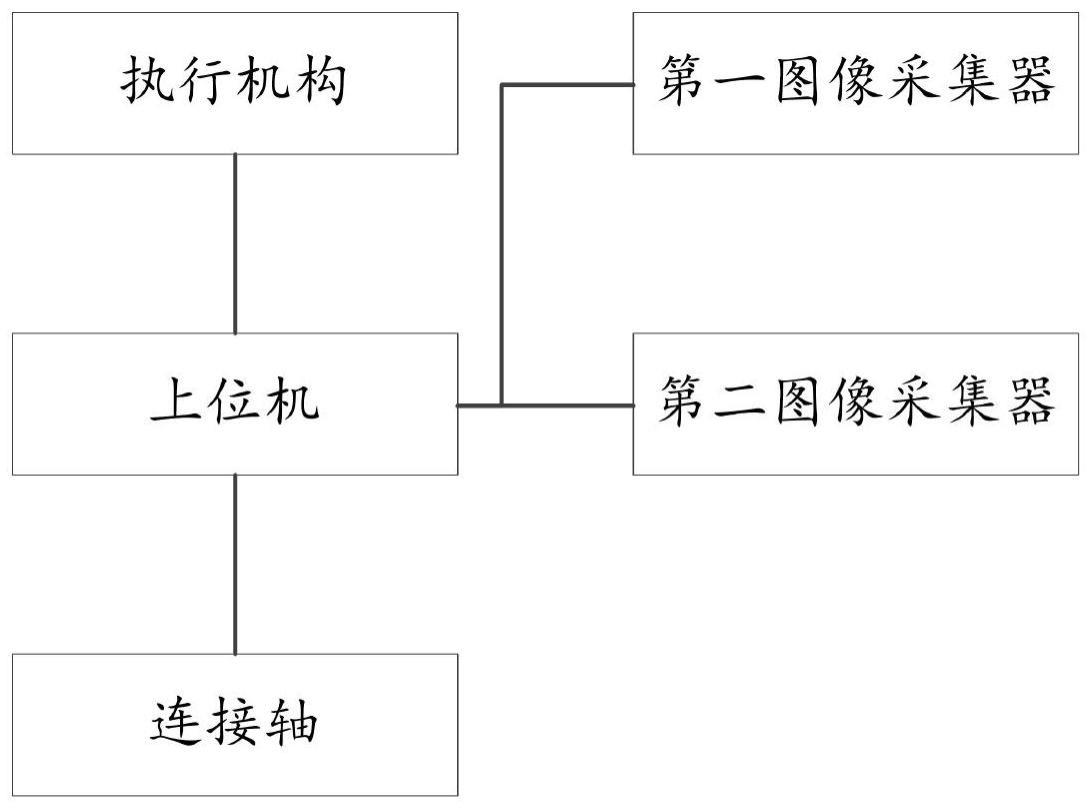
2、本发明实施例第一方面公开了一种实时跟踪的前瞻路径规划系统,包括执行机构、驱动臂、前瞻跟踪仪、通信电缆和上位机,所述上位机通过通信电缆连接所述执行机构,所述驱动臂的一端连接在所述执行机构,所述驱动臂的另一端连接所述前瞻跟踪仪,所述前瞻跟踪仪位于执行机构前进方向的前方,所述前瞻跟踪仪上安装有第一图像采集器和第二图像采集器,所述第一图像采集器和第二图像采集器均与上位机连接,所述第一图像采集器用于采集前方第一图像信号发送给上位机,所述第二图像采集器用于采集前方第二图像信号发送给上位机,以使上位机根据第一图像信号获取执行机构的前进方向,并计算得到所述驱动臂的角度值,根据第二图像信号计算得到运动路径,并根据该运动路径获取执行机构的运动角度值;所述驱动臂带有连接轴,所述连接轴与上位机连接以驱动连接轴转动。
3、作为一种可选的实施方式,在本发明实施例第一方面中,所述第一图像采集器为双激光采集器或者三激光采集器。
4、作为一种可选的实施方式,在本发明实施例第一方面中,所述连接轴包括第一连接轴和第二连接轴,所述驱动臂还包括驱动臂本体、第一连接轴和第二连接轴,所述第一连接轴连接驱动臂本体和前瞻跟踪仪,所述第二连接轴连接驱动臂本体和执行机构。
5、作为一种可选的实施方式,在本发明实施例第一方面中,所述连接轴为四轴连接轴。
6、本发明实施例第二方面公开了一种实时跟踪的前瞻路径规划方法,包括:
7、分别采集第一图像信号和第二图像信号;
8、根据第二图像信号获取运动路径,并获取执行机构当前的前进路径,计算得到所述运动路径与前进路径之间的路径偏差;
9、根据所述路径偏差计算执行机构的运动角度值;
10、根据所述第一图像信号获取路径方向信息,以根据所述路径方向信息判断执行机构前进方向;
11、根据所述执行机构的运动角度值计算驱动臂的角度值;
12、根据所述驱动臂的角度值驱动所述驱动臂转动至相应角度,以及根据所述运动角度值控制所述执行机构按照运动角度值前进。
13、作为一种可选的实施方式,在本发明实施例第二方面中,所述根据所述执行机构的运动角度值计算驱动臂的角度值,包括:
14、获取驱动臂的当前角度值,根据执行机构的运动角度值和所述当前角度值计算得到当前视野范围;
15、判断预设距离内执行机构是否脱离当前视野范围;
16、当判断到执行机构不会脱离当前视野范围时,将所述驱动臂的当前角度值作为驱动臂的角度值;
17、当判断到执行机构会脱离当前视野范围时,根据所述执行机构的运动角度值和当前视野范围计算驱动臂的角度值。
18、作为一种可选的实施方式,在本发明实施例第二方面中,还包括:
19、以执行机构的基坐标系定义为世界坐标系,根据所述世界坐标系获取执行机构相对于世界坐标系的位姿矩阵,并标定执行机构上的末端法兰相对于基坐标系的位姿矩阵;
20、标定前瞻跟踪仪相对于所述末端法兰的位姿矩阵。
21、本发明实施例第三方面公开一种实时跟踪的前瞻路径规划装置,包括
22、图像信号采集模块:用于分别采集第一图像信号和第二图像信号;
23、路径偏差获取模块;用于根据第二图像信号获取运动路径,并获取执行机构当前的前进路径,计算得到所述运动路径与前进路径之间的路径偏差;
24、运动角度计算模块:用于根据所述路径偏差计算执行机构的运动角度值;
25、前进方向判断模块:用于根据所述第一图像信号获取路径方向信息,以根据所述路径方向信息判断执行机构前进方向;
26、角度值获取模块:用于根据所述执行机构的运动角度值计算驱动臂的角度值;
27、前进控制模块:用于根据所述驱动臂的角度值驱动所述驱动臂转动至相应角度,以及根据所述运动角度值控制所述执行机构按照运动角度值前进。
28、本发明实施例第四方面公开一种电子设备,包括:存储有可执行程序代码的存储器;与所述存储器耦合的处理器;所述处理器调用所述存储器中存储的所述可执行程序代码,用于执行本发明实施例第二方面公开的实时跟踪的前瞻路径规划方法。
29、本发明实施例第五方面公开一种计算机可读存储介质,其存储计算机程序,其中,所述计算机程序使得计算机执行本发明实施例第二方面公开的实时跟踪的前瞻路径规划方法。
30、与现有技术相比,本发明实施例具有以下有益效果:
31、本发明实施例中在前瞻跟踪仪上安装第一图像采集器和第二图像采集器,分别用于采集前方第一图像信号和前方第二图像信号,以使上位机根据第一图像信号获取执行机构的前进方向,并计算得到所述驱动臂的角度值,根据第二图像信号计算得到运动路径,并根据该运动路径获取执行机构的运动角度值,进而可以精准计算得到前进路径,并且实施例的驱动臂带有连接轴,上位机驱动连接轴转动,因此连接在驱动臂的前瞻跟踪仪可以跟随运动,进而在保证短视距、窄视野的情况下,保证识别精度的同时提高有效观察范围,从而提高跟踪仪实时跟踪复杂轨迹的适应性。
技术特征:
1.一种实时跟踪的前瞻路径规划系统,其特征在于,包括执行机构、驱动臂、前瞻跟踪仪、通信电缆和上位机,所述上位机通过通信电缆连接所述执行机构,所述驱动臂的一端连接在所述执行机构,所述驱动臂的另一端连接所述前瞻跟踪仪,所述前瞻跟踪仪位于执行机构前进方向的前方,所述前瞻跟踪仪上安装有第一图像采集器和第二图像采集器,所述第一图像采集器和第二图像采集器均与上位机连接,所述第一图像采集器用于采集前方第一图像信号发送给上位机,所述第二图像采集器用于采集前方第二图像信号发送给上位机,以使上位机根据第一图像信号获取执行机构的前进方向,并计算得到所述驱动臂的角度值,根据第二图像信号计算得到运动路径,并根据该运动路径获取执行机构的运动角度值;所述驱动臂带有连接轴,所述连接轴与上位机连接以驱动连接轴转动。
2.根据权利要求1所述的前瞻路径规划系统,其特征在于,所述第一图像采集器为双激光采集器或者三激光采集器。
3.根据权利要求1所述的前瞻路径规划系统,其特征在于,所述连接轴包括第一连接轴和第二连接轴,所述驱动臂还包括驱动臂本体、第一连接轴和第二连接轴,所述第一连接轴连接驱动臂本体和前瞻跟踪仪,所述第二连接轴连接驱动臂本体和执行机构。
4.根据权利要求1所述的前瞻路径规划系统,其特征在于,所述连接轴为四轴连接轴。
5.一种实时跟踪的前瞻路径规划方法,其特征在于,包括:
6.根据权利要求5所述的前瞻路径规划方法,其特征在于,所述根据所述执行机构的运动角度值计算驱动臂的角度值,包括:
7.根据权利要求5所述的前瞻路径规划方法,其特征在于,还包括:
8.一种实时跟踪的前瞻路径规划装置,其特征在于,包括
9.一种电子设备,其特征在于,包括:存储有可执行程序代码的存储器;与所述存储器耦合的处理器;所述处理器调用所述存储器中存储的所述可执行程序代码,用于执行权利要求5至7任一项所述的实时跟踪的前瞻路径规划方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储计算机程序,其中,所述计算机程序使得计算机执行权利要求5至7任一项所述的实时跟踪的前瞻路径规划方法。
技术总结
本发明实施例公开了一种实时跟踪的前瞻路径规划系统、方法及装置,系统包括执行机构、驱动臂、前瞻跟踪仪、通信电缆和上位机,第一图像采集器用于采集前方第一图像信号,第二图像采集器用于采集前方第二图像信号,以使上位机根据第一图像信号获取执行机构的前进方向,并计算得到驱动臂的角度值,根据第二图像信号计算得到运动路径,并根据该运动路径获取执行机构的运动角度值,进而可以精准计算得到前进路径,并且实施例的驱动臂带有连接轴,上位机驱动连接轴转动,因此连接在驱动臂的前瞻跟踪仪可以跟随运动,进而在保证短视距、窄视野的情况下,保证识别精度的同时提高有效观察范围,从而提高跟踪仪实时跟踪复杂轨迹的适应性。
技术研发人员:刘俊,沈鹏,侯文峰,卢飞跃,毕天昊
受保护的技术使用者:广州番禺职业技术学院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!