一种基于cartographer的机器人重定位方法及设备与流程
本申请涉及机器人应用,尤其涉及一种基于cartographer的机器人重定位方法及设备。
背景技术:
1、移动机器人的广泛应用让机器人的定位变得越来越重要。但是基于cartographer的机器人slam系统不可避免的会出现定位丢失的情况,而且如果需要机器人找回定位,就需要将机器人放置在原点位置重新启动帮助找回定位,对机器人的任务会造成极大的影响,而且也有可能导致重复丢失定位。
2、因此,如何解决机器人在任意位置的定位找回成为亟待解决的问题。
技术实现思路
1、本申请实施例提供了一种基于cartographer的机器人重定位方法及设备,用于解决如下技术问题:解决机器人在任意位置的定位找回。
2、本申请实施例采用下述技术方案:
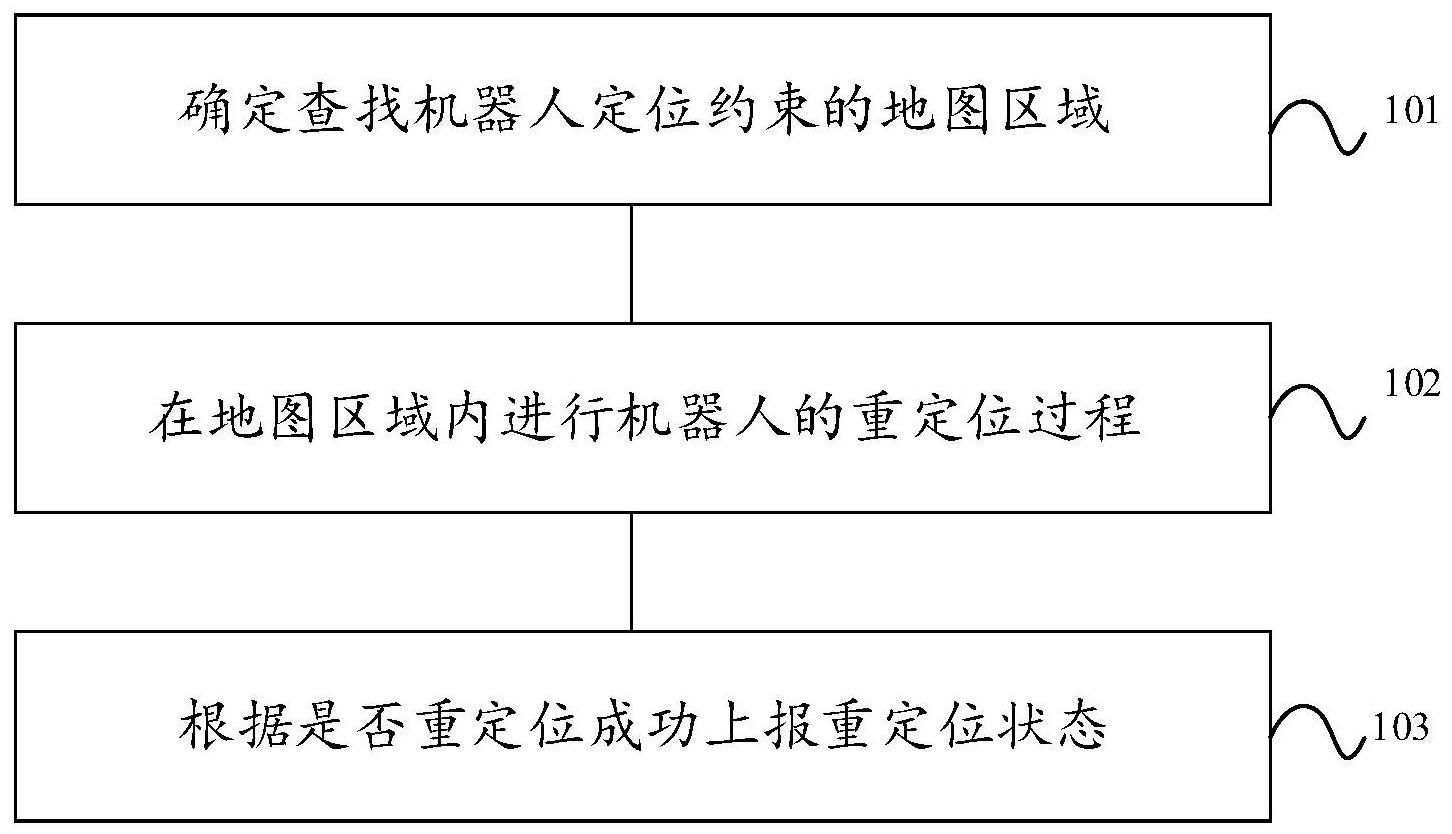
3、一方面,本申请实施例提供了一种基于cartographer的机器人重定位方法,所述方法包括:确定机器人重定位的地图区域;在所述地图区域的局部区域内,查找机器人定位约束,所述机器人定位约束用于指示符合重定位要求的机器人位姿信息;预设时间之后,在所述地图区域的全局区域内,继续查找所述机器人定位约束;在查找到的所述机器人定位约束数量超过预设数量阈值时,对所述机器人定位约束进行定位纠正,进而完成机器人的重定位过程。
4、在本申请说明书的一个或多个实施例中,确定机器人重定位的地图区域之后,所述方法还包括:将所述地图区域传入cartographer;其中,所述地图区域用一对斜对角顶点的坐标进行表示。
5、在本申请说明书的一个或多个实施例中,将所述地图区域传入cartographer之后,所述方法还包括:若所述地图区域小于预设面积阈值,则对所述一对斜对角顶点的坐标进行扩展,扩展区域为所述一对斜对角顶点分别对应的预设圆形区域。
6、在本申请说明书的一个或多个实施例中,将所述地图区域传入cartographer,具体包括:通过rviz插件将所述地图区域的顶点坐标,传入所述cartographer。
7、在本申请说明书的一个或多个实施例中,在所述地图区域的局部区域内,查找机器人定位约束之后,所述方法还包括:控制所述机器人在原地进行旋转。
8、在本申请说明书的一个或多个实施例中,在所述地图区域的全局区域内,继续查找所述机器人定位约束之后,所述方法还包括:确定没有查找到所述机器人定位约束;上报重定位失败信息,并停止重定位。
9、在本申请说明书的一个或多个实施例中,在停止重定位之后,所述方法还包括:控制机器人移动预设距离;移动到位后,重新进行机器人重定位过程。
10、在本申请说明书的一个或多个实施例中,对所述机器人定位约束进行定位纠正,具体包括:通过ceres库对所述机器人定位约束进行精匹配;基于精匹配结果,确定所述机器人定位约束,完成所述机器人的重定位。
11、在本申请说明书的一个或多个实施例中,对所述机器人定位约束进行定位纠正之后,所述方法还包括:上报所述机器人的重定位状态。
12、另一方面,本申请实施例还提供了一种基于cartographer的机器人重定位设备,所述设备包括:至少一个处理器;以及,与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有能够被所述至少一个处理器执行的指令,以使所述至少一个处理器能够执行如上述的一种基于cartographer的机器人重定位方法。
13、本申请实施例提供的一种基于cartographer的机器人重定位方法及设备,具有以下有益效果:通过上传cartographer地图区域,在地图区域内以递进的方式查找约束的过程,实现了机器人可以在任意位置进行重定位;地图区域为可视化区域,该操作提高了重定位的便利性;同时,在查找到机器人定位约束之后,会上报重定位的状态,可以帮助用户处理机器人任务。
技术特征:
1.一种基于cartographer的机器人重定位方法,其特征在于,所述方法包括:
2.根据权利要求1所述的一种基于cartographer的机器人重定位方法,其特征在于,确定机器人重定位的地图区域之后,所述方法还包括:
3.根据权利要求2所述的一种基于cartographer的机器人重定位方法,其特征在于,将所述地图区域传入cartographer之后,所述方法还包括:
4.根据权利要求2所述的一种基于cartographer的机器人重定位方法,其特征在于,将所述地图区域传入cartographer,具体包括:
5.根据权利要求1所述的一种基于cartographer的机器人重定位方法,其特征在于,在所述地图区域的局部区域内,查找机器人定位约束之后,所述方法还包括:
6.根据权利要求1所述的一种基于cartographer的机器人重定位方法,其特征在于,在所述地图区域的全局区域内,继续查找所述机器人定位约束之后,所述方法还包括:
7.根据权利要求6所述的一种基于cartographer的机器人重定位方法,其特征在于,在停止重定位之后,所述方法还包括:
8.根据权利要求1所述的一种基于cartographer的机器人重定位方法,其特征在于,对所述机器人定位约束进行定位纠正,具体包括:
9.根据权利要求8所述的一种基于cartographer的机器人重定位方法,其特征在于,对所述机器人定位约束进行定位纠正之后,所述方法还包括:
10.一种基于cartographer的机器人重定位设备,其特征在于,所述设备包括:
技术总结
本发明公开了一种基于cartographer的机器人重定位方法及设备,属于机器人控制技术领域,用于解决机器人在任意位置的定位找回的技术问题。方法包括:确定机器人重定位的地图区域;在所述地图区域的局部区域内,查找机器人定位约束,所述机器人定位约束用于指示符合重定位要求的机器人位姿信息;预设时间之后,在所述地图区域的全局区域内,继续查找所述机器人定位约束;在查找到的所述机器人定位约束数量超过预设数量阈值时,对所述机器人定位约束进行定位纠正,进而完成机器人的重定位过程。
技术研发人员:郝济耀,马辰,华逢彬,程瑶,李朝铭,刘鹏
受保护的技术使用者:山东新一代信息产业技术研究院有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!