医疗运输机器人的控制方法、装置及电子设备
本发明涉及机器人,尤其是涉及一种医疗运输机器人的控制方法、装置及电子设备。
背景技术:
1、现有的医疗运输机器人大概的技术就是简单的从不同科室之间运送物资,即使是手术室也仅仅只是运送到手术室的仓库,并不直接运送到手术间。而避障算法也是与常用的避障算法基本一致。现有的手术间设置的过道和主干道宽度,基本为两张手术床的宽度,过道没有为机器人进行设置多余的宽度。手术室往往会有临时的手术器械箱和手术床的堆积,导致机器人无法进行正常运输。
2、因此,目前的医疗运输机器人的控制方法存在运输效率低的现状。
技术实现思路
1、本发明的目的在于提供一种医疗运输机器人的控制方法、装置及电子设备,以提升医疗物品的运输效率。
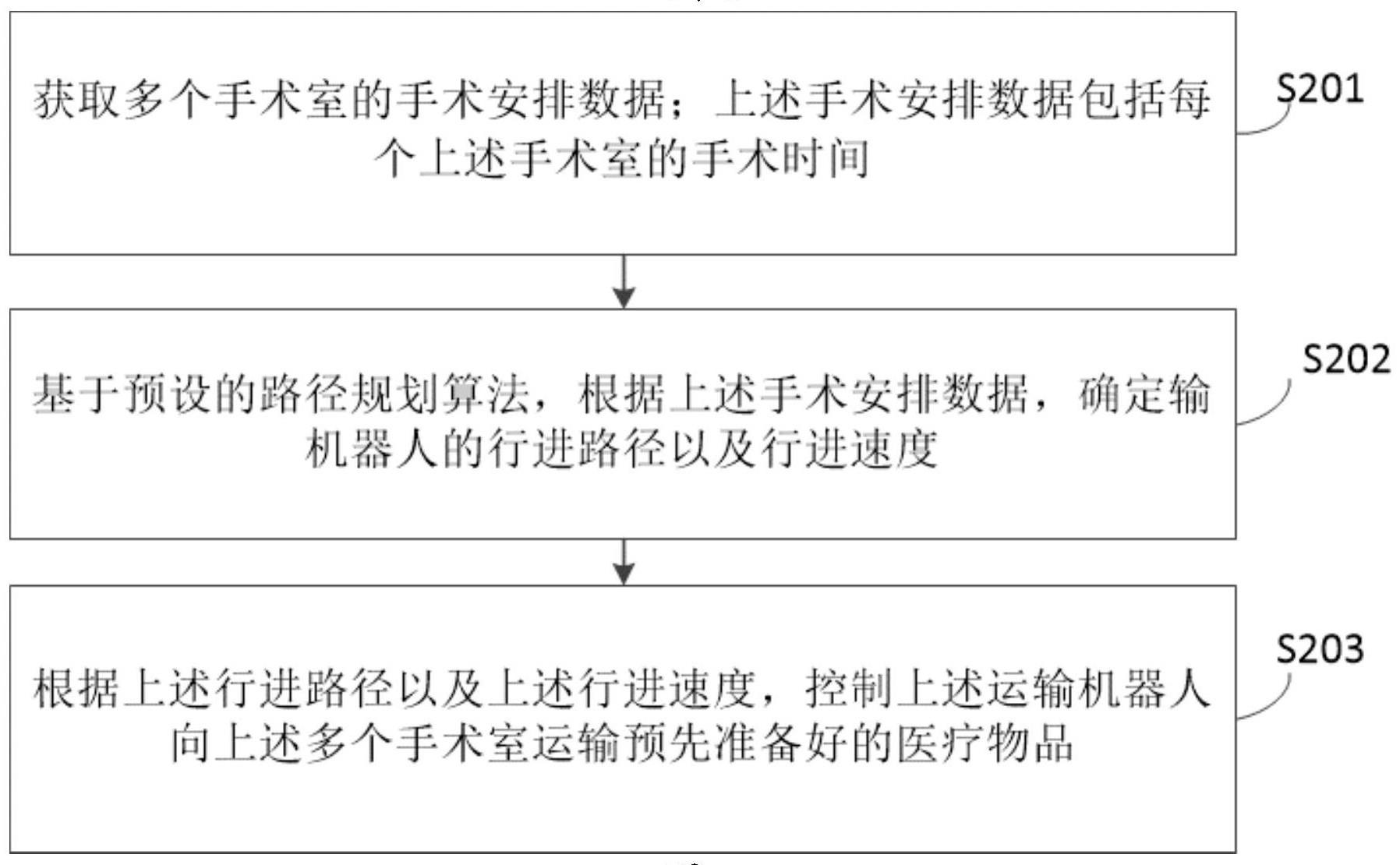
2、第一方面,本发明实施例提供了一种医疗运输机器人的控制方法,其中,包括:获取多个手术室的手术安排数据;上述手术安排数据包括每个上述手术室的手术时间;基于预设的路径规划算法,根据上述手术安排数据,确定上述运输机器人的行进路径以及行进速度;根据上述行进路径以及上述行进速度,控制上述运输机器人向上述多个手术室运输预先准备好的医疗物品。
3、结合第一方面,本发明实施例提供了第一方面的第一种可能的实施方式,其中,上述运输机器人内置有通讯装置以及图像采集设备;根据上述行进路径以及上述行进速度,控制运输机器人向上述多个手术室运输预先准备好的医疗物品的步骤,包括:根据上述行进路径以及上述行进速度,控制上述运输机器人向上述多个手术室行进,并通过上述图像采集设备采集上述运输机器人行进时的图像信息;根据上述图像信息,确定上述运输机器人的运行路况信息;根据上述运行路况信息,确定上述运输机器人的行进路线中是否存在障碍物;如果上述运输机器人的行进路线中存在障碍物,根据所述图像信息,确定所述运输机器人所在的预设范围区域是否有工作人员;如果所述运输机器人所在的预设范围区域有工作人员,控制所述通讯装置开启,以获得所述工作人员的语音数据;将所述语音数据传输至后台操作人员。
4、结合第一方面的第一种可能的实施方式,本发明实施例提供了第一方面的第二种可能的实施方式,其中,上述图像采集设备为红外摄像机;根据上述图像信息,确定上述运输机器人所在的预设范围区域是否有工作人员的步骤,包括:基于预设的红外算法,根据上述图像信息,确定上述运输机器人所在的预设范围区域是否有工作人员。
5、结合第一方面的第一种可能的实施方式,本发明实施例提供了第一方面的第三种可能的实施方式,其中,上述运输机器人内置有雷达;如果上述运输机器人的行进路线中存在障碍物,根据上述图像信息,确定上述运输机器人所在的预设范围区域是否有工作人员的步骤,包括:如果上述运输机器人的行进路线中存在障碍物,通过上述雷达,判断上述障碍物与上述运输机器人之间的距离是否处于预设的安全距离范围;如果否,根据上述图像信息,确定上述运输机器人所在的预设范围区域是否有工作人员。
6、结合第一方面的第一种可能的实施方式,本发明实施例提供了第一方面的第四种可能的实施方式,其中,如果上述运输机器人的行进路线中存在障碍物,根据上述图像信息,确定上述运输机器人所在的预设范围区域是否有工作人员之后,上述方法还包括:如果上述运输机器人所在的预设范围区域没有工作人员,生成报警信息;将上述报警信息传输至上述后台操作人员。
7、结合第一方面的第一种可能的实施方式,本发明实施例提供了第一方面的第五种可能的实施方式,其中,将上述语音数据传输至后台操作人员的步骤之后,上述方法还包括:获取位置调整指令;根据上述位置调整指令,控制上述运输机器人向预设位置行进,以进行避障;其中,上述预设位置为距离墙壁最近的位置。
8、结合第一方面的第五种可能的实施方式,本发明实施例提供了第一方面的第六种可能的实施方式,其中,根据上述位置调整指令,控制上述运输机器人向预设位置行进,以进行避障的步骤之后,上述方法还包括:获取继续行进指令;根据上述继续行进指令,控制上述运输机器人继续向上述手术室行进。
9、结合第一方面,本发明实施例提供了第一方面的第七种可能的实施方式,其中,根据上述行进路径以及上述行进速度,控制运输机器人向上述手术室运输预先准备好的医疗物品的步骤,包括:根据上述行进路径以及上述行进速度,生成电压控制信号;根据上述电压控制信号,控制运输机器人向上述手术室运输预先准备好的医疗物品。
10、第二方面,本发明实施例提供了一种医疗运输机器人的控制装置,其中,上述装置包括:数据获取模块,用于获取多个手术室的手术安排数据;上述手术安排数据用于指示每个手术室对应的手术时间顺序数据;路径速度规划模块,用于基于预设的路径规划算法,根据上述手术安排数据,规划运输机器人的行进路径以及行进速度;控制运行模块,用于根据上述行进路径以及上述行进速度,控制上述运输机器人向上述多个手术室运输预先准备好的医疗物品。
11、第三方面,本发明实施例提供了一种电子设备,其中,上述电子设备包括处理器和存储器,上述存储器存储有能够被上述处理器执行的计算机可执行指令,上述处理器执行上述计算机可执行指令以实现第一方面至任一项上述的第一方面的第七种可能的实施方式医疗运输机器人的控制方法。
12、本发明实施例带来了以下有益效果:
13、本发明实施例提供的一种医疗运输机器人的控制方法、装置及电子设备,包括:获取多个手术室的手术安排数据;上述手术安排数据包括每个上述手术室的手术时间;基于预设的路径规划算法,根据上述手术安排数据,确定上述运输机器人的行进路径以及行进速度;根据上述行进路径以及上述行进速度,控制上述运输机器人向上述多个手术室运输预先准备好的医疗物品。该方法预先通过路径规划算法,根据上述手术安排数据,确定上述运输机器人的行进路径以及行进速度,从而提升医疗物品的运输效率。
14、本实施例公开的其他特征和优点将在随后的说明书中阐述,或者,部分特征和优点可以从说明书推知或毫无疑义地确定,或者通过实施本公开的上述技术即可得知。
15、为使本公开的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种医疗运输机器人的控制方法,其特征在于,包括:
2.根据权利要求1所述的医疗运输机器人的控制方法,其特征在于,所述运输机器人内置有通讯装置以及图像采集设备;
3.根据权利要求2所述的医疗运输机器人的控制方法,其特征在于,所述图像采集设备为红外摄像机;根据所述图像信息,确定所述运输机器人所在的预设范围区域是否有工作人员的步骤,包括:
4.根据权利要求2所述的医疗运输机器人的控制方法,其特征在于,所述运输机器人内置有雷达;如果所述运输机器人的行进路线中存在障碍物,根据所述图像信息,确定所述运输机器人所在的预设范围区域是否有工作人员的步骤,包括:
5.根据权利要求2所述的医疗运输机器人的控制方法,其特征在于,如果所述运输机器人的行进路线中存在障碍物,根据所述图像信息,确定所述运输机器人所在的预设范围区域是否有工作人员之后,所述方法还包括:
6.根据权利要求2所述的医疗运输机器人的控制方法,其特征在于,将所述语音数据传输至后台操作人员的步骤之后,所述方法还包括:
7.根据权利要求6所述的医疗运输机器人的控制方法,其特征在于,根据所述位置调整指令,控制所述运输机器人向预设位置行进,以进行避障的步骤之后,所述方法还包括:
8.根据权利要求1所述的医疗运输机器人的控制方法,其特征在于,根据所述行进路径以及所述行进速度,控制运输机器人向所述手术室运输预先准备好的医疗物品的步骤,包括:
9.一种医疗运输机器人的控制装置,其特征在于,所述装置包括:
10.一种电子设备,其特征在于,所述电子设备包括处理器和存储器,所述存储器存储有能够被所述处理器执行的计算机可执行指令,所述处理器执行所述计算机可执行指令以实现权利要求1至8任一项所述的医疗运输机器人的控制方法。
技术总结
本发明实施例提供了一种医疗运输机器人的控制方法、装置及电子设备,包括:获取多个手术室的手术安排数据;上述手术安排数据包括每个上述手术室的手术时间;基于预设的路径规划算法,根据上述手术安排数据,确定上述运输机器人的行进路径以及行进速度;根据上述行进路径以及上述行进速度,控制上述运输机器人向上述多个手术室运输预先准备好的医疗物品。该方法预先通过路径规划算法,根据上述手术安排数据,确定上述运输机器人的行进路径以及行进速度,从而提升医疗物品的运输效率。
技术研发人员:钟乔恒,赵波,黄天扬,吴添恒,李震宇
受保护的技术使用者:浙江大学温州研究院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!