机器人及运动控制方法与流程
本发明涉及机器人控制,特别涉及一种机器人。本发明同时涉及一种运动控制方法。
背景技术:
1、随着机器人技术的发展,越来越多的可运动机器人在货运、仓储、物流、餐饮等产业服务中得到应用,极大方便了人类的生产生活。但同时,机器人在运动过程中难免会遇到障碍物,为避免影响机器人的正常运动,需要在机器人的结构中添加对障碍物进行识别的装备,以使机器人进行避障。
2、在当前的机器人设计中,机器人避障需要通过安全plc模组和激光雷达之间的交互、配合才可实现,其中,激光雷达仅具有障碍物探测功能,由安全plc模组进行避障所涉及的软件实现。可见,当前实现机器人避障的系统结构复杂、且交互繁琐。因此,亟需一种结构较为简单且能实现在运动过程中成功避障的机器人。
技术实现思路
1、有鉴于此,本发明实施例提供了一种机器人,以解决现有技术中存在的技术缺陷。本发明实施例同时提供了一种运动控制方法。
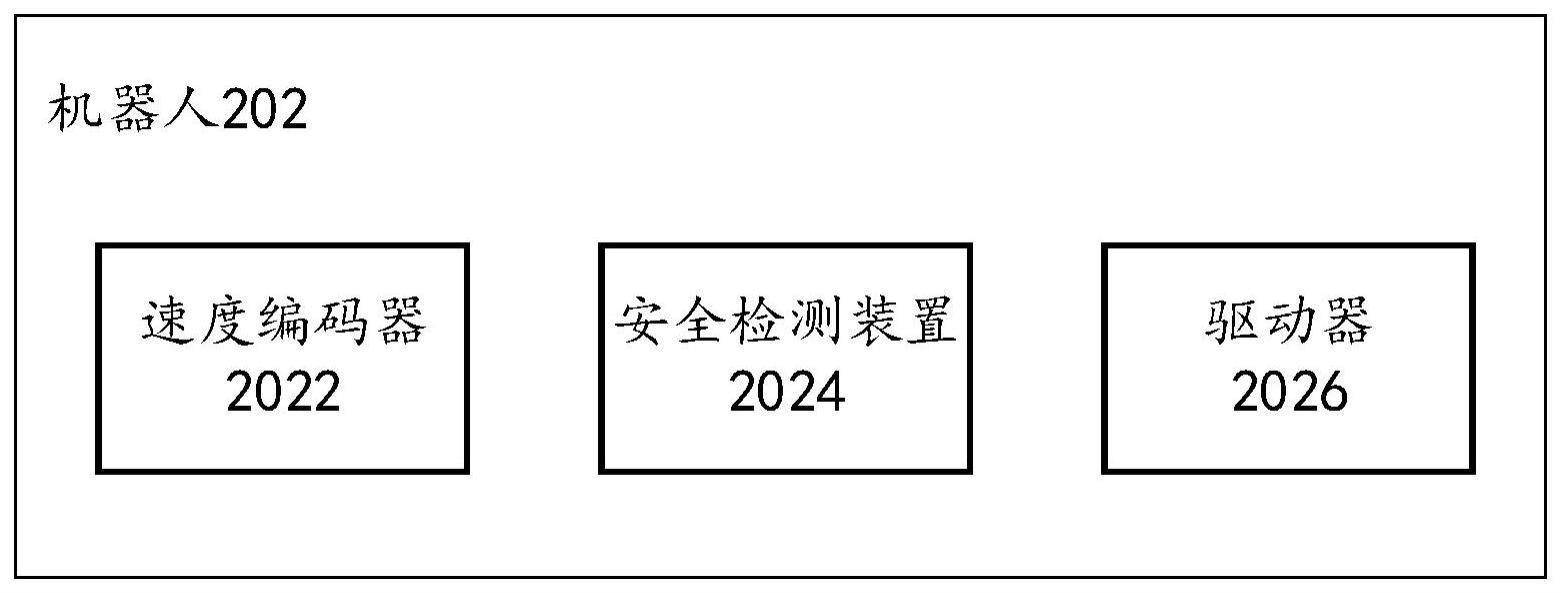
2、根据本发明实施例的第一方面,提供了一种机器人,机器人包括速度编码器、安全检测装置和驱动器,其中,安全检测装置中集成有检测部件和芯片;
3、速度编码器,被配置为采集机器人的速度信息,获得速度信息对应的编码信号,并将编码信号发送至安全检测装置;
4、安全检测装置,被配置为通过芯片对编码信号进行解析,确定机器人的当前运动速度,根据当前运动速度,更新机器人的保护区域,通过检测部件基于保护区域进行障碍物检测,根据检测结果生成控制指令,将控制指令发送至驱动器;
5、驱动器,被配置为响应于控制指令,对机器人进行运动控制。
6、根据本发明实施例的第二方面,提供了一种运动控制方法,方法应用于机器人,机器人包括速度编码器、安全检测装置和驱动器,其中,安全检测装置中集成有检测部件和芯片;
7、速度编码器采集机器人的速度信息,获得速度信息对应的编码信号,并将编码信号发送至安全检测装置;
8、安全检测装置通过芯片对编码信号进行解析,确定机器人的当前运动速度,根据当前运动速度,更新机器人的保护区域,通过检测部件基于保护区域进行障碍物检测,根据检测结果生成控制指令,将控制指令发送至驱动器;
9、驱动器响应于控制指令,对机器人进行运动控制。
10、本发明提供的机器人包括速度编码器、安全检测装置和驱动器,其中,安全检测装置中集成有检测部件和芯片;速度编码器,被配置为采集机器人的速度信息,获得速度信息对应的编码信号,并将编码信号发送至安全检测装置;安全检测装置,被配置为通过芯片对编码信号进行解析,确定机器人的当前运动速度,根据当前运动速度,更新机器人的保护区域,通过检测部件基于保护区域进行障碍物检测,根据检测结果生成控制指令,将控制指令发送至驱动器;驱动器,被配置为响应于控制指令,对机器人进行运动控制。安全检测装置接收速度编码器发送的编码信号,并通过芯片对编码信号进行解析确定出机器人的当前速度,用于更新机器人的保护区域,通过检测部件对保护区域进行障碍物检测,根据检测结果生成控制指令,以使驱动器对机器人进行运动控制,通过安全检测装置针对保护区域对障碍物进行检测的检测功能和基于检测结果生成控制指令的控制功能,实现多功能的功能实现,减少了机器人结构的复杂性与机器人的构造成本。
技术特征:
1.一种机器人,其特征在于,所述机器人包括速度编码器、安全检测装置和驱动器,其中,所述安全检测装置中集成有检测部件和芯片;
2.根据权利要求1所述的机器人,其特征在于,所述速度编码器的数目为多个,且与所述机器人的车轮一一对应。
3.根据权利要求2所述的机器人,其特征在于,所述安全检测装置,进一步被配置为通过所述芯片整合各所述速度编码器的编码信号,并对整合后的编码信号进行解析,确定所述机器人的当前运动速度。
4.根据权利要求3所述的机器人,其特征在于,所述安全检测装置,进一步被配置为通过所述芯片基于所述机器人的运动关联参数,对整合后的编码信号进行解析,确定所述机器人的当前运动速度。
5.根据权利要求1所述的机器人,其特征在于,所述安全检测装置,进一步被配置为通过所述芯片根据所述当前运动速度以及预设对应关系,确定目标保护区域,将所述机器人当前的保护区域更新为所述目标保护区域,其中,所述预设对应关系为预先在前端配置的所述机器人不同的运动速度与不同大小的保护区域的对应关系。
6.根据权利要求1至5任一项所述的机器人,其特征在于,所述控制指令包括停止指令;
7.根据权利要求6所述的机器人,其特征在于,所述机器人包括常闭状态的急停开关,所述急停开关的一端连接所述安全检测装置、所述急停开关的另一端连接所述驱动器;
8.根据权利要求7所述的机器人,其特征在于,所述急停开关在被触发的情况下,断开所述安全检测装置与所述驱动器之间的连接。
9.根据权利要求8所述的机器人,其特征在于,所述机器人还包括复位开关,所述复位开关用于在所述急停开关恢复闭合状态后被触发,以使所述机器人恢复运动。
10.根据权利要求1所述的机器人,其特征在于,所述安全检测装置,还被配置为通过所述芯片确定所述当前运动速度大于预设速度阈值的情况下,生成停止指令,将所述停止指令发送至所述驱动器;
11.一种运动控制方法,其特征在于,所述方法应用于机器人,所述机器人包括速度编码器、安全检测装置和驱动器,其中,所述安全检测装置中集成有检测部件和芯片;
技术总结
本发明提供机器人及运动控制方法,其中机器人包括速度编码器、安全检测装置和驱动器,所述安全检测装置中集成有检测部件和芯片;速度编码器被配置为采集机器人的速度信息,获得速度信息对应的编码信号,并将编码信号发送至安全检测装置;安全检测装置被配置为通过芯片对编码信号进行解析,确定机器人的当前运动速度,根据当前运动速度,更新机器人的保护区域,通过检测部件基于保护区域进行障碍物检测,根据检测结果生成控制指令,将控制指令发送至驱动器;驱动器被配置为响应于控制指令,对机器人进行运动控制。安全检测装置通过检测部件基于保护区域对障碍物进行检测和基于检测结果生成控制指令的功能,减少了机器人结构的复杂性与构造成本。
技术研发人员:刘云波,肖兆锋
受保护的技术使用者:北京极智嘉科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!