一种基于实战化建设的多元巡游定位航道规划与共享平台的制作方法
本发明专利涉及花车巡游控制,尤其涉及一种基于实战化建设的多元巡游定位航道规划与共享平台。
背景技术:
1、现阶段,在主题公园或文化街区等特定的场景以及特定的节日下,通常为了增强游客的娱乐性,观赏性以及互动性,会设置花车巡游活动,通过将巡游花车与灯管音响设备相互结合,用以打造一种梦幻喜庆的娱乐氛围。但是现有巡游花车通常有驾驶员进行驾驶,或通过远程控制端进行人工遥控巡航控制,与其搭配的灯光音响设备也是人为设定演绎流程后进行指定节点的人工控制操作,此种花车巡游的控制方式不仅增大了人为监测控制成本,使得具有创意特色的娱乐活动变得较为死板,同时也降低了花车巡游活动在实际场景中的灵动性。
2、公开号为cn103067842a的中国专利,提供了一种巡游花车同步扩声系统,此专利中通过对音频进行远程无线传输与放大处理,用以进行花车巡游过程中的音频播放。但是此专利中的音频播放方式依然为指定节点下人工控制的方式,并未建立巡游花车与音频设备的联合控制模式与全自动控制功能。公开号为cn111626521a的中国专利提供了一种游览路线生成的方法及装置,此专利中通过获取游客的人脸识别特征,进行对应的游览路线的规划,但是游客的人脸特征并不能完全反应游客的性格特征与心理活动特征,因此通过此种方式所建立的巡游轨迹规划并非能够满足游客的预期。
3、因此,针对现有的指定场景下巡游定位规划中存在的问题,本发明中提供了一种基于实战化建设的多元巡游定位航道规划与共享平台。
技术实现思路
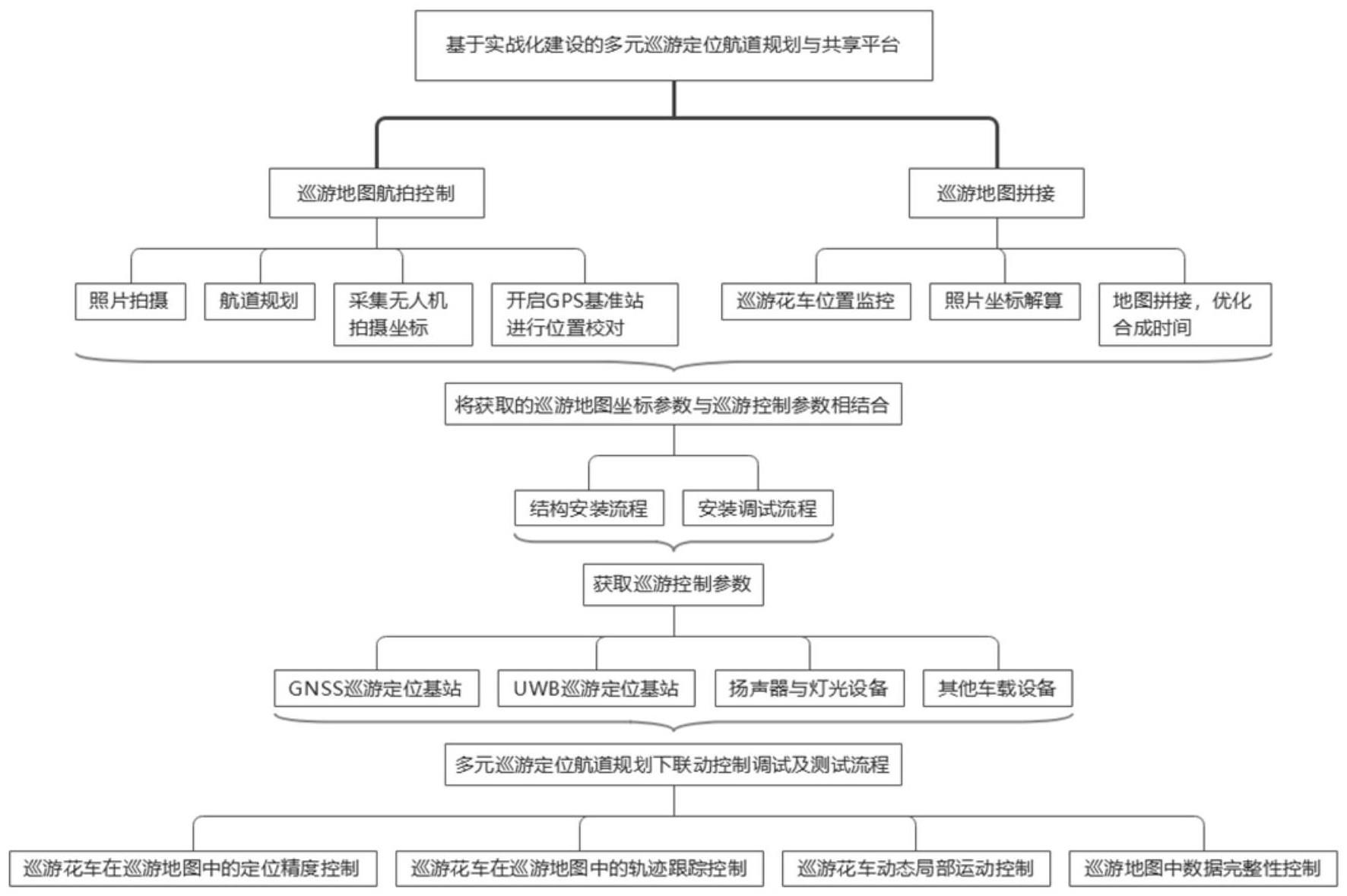
1、针对上述存在的问题,本发明中提供了一种基于实战化建设的多元巡游定位航道规划与共享平台,具体包括巡游地图航拍模块,巡游地图合成模块与巡游设备控制模块;其中,在巡游地图航拍模块中拍摄场景图片,将场景图片传输至巡游地图合成模块中建立场景地图并获取巡游地图坐标参数,将巡游地图坐标参数与巡游设备控制模块中的巡游控制参数相结合,用以进行巡游设备的无线远程联动运动控制。
2、优选的,所述巡游地图航拍模块中,启动gps基站进行无人机巡游定位校准;其中所述无人巡游定位校准中,建立了航道多元数据定位整合模型,用以进行巡游航道漂移纠偏操作。
3、优选的,所述巡游地图合成模块中,首先进行多个场景图片位置坐标解算,并根据解算结果进行巡游地图拼接,待巡游地图拼接完成后以巡游地图为基础进行巡游车的动态位置监控。
4、优选的,所述多个场景图片位置坐标解算,结合航道多元数据定位整合模型的输出数据,通过获取巡游航道漂移纠偏后的无人机巡游定位姿态数据集p={p1,p2,...,pn},并根据定位姿态数据集计算地图拼接矩阵。
5、优选的,将所述多个场景图片位置坐标解算中获得的位置坐标解算数据,与场景地图中的具体特征数据相结合,通过双重计算匹配方式进行巡游地图拼接时间优化。
6、优选的,所述巡游设备控制模块,具体包括gnss巡游定位基站,uwb巡游定位基站,扬声器及灯光设备控制与其他车载设备控制。
7、优选的,所述gnss巡游定位基站,uwb巡游定位基站中,还在巡游设备控制模块中分别建立了gnss流动站与uwb标签。
8、优选的,所述扬声器及灯光设备控制中,还包括巡游音响控制,所述巡游音响控制中,建立了巡游车的动态位置与巡游音响音乐切换联合控制模式。
9、优选的,所述巡游设备控制模块中,规定了gnss巡游定位基站,uwb巡游定位基站,扬声器及灯光设备控制与其他车载设备控制的结构安装流程与通信调试流程。
10、优选的,所述无线远程联动运动控制,具体包括巡游车定位精度控制,巡游车轨迹跟踪控制,巡游车动态局部运动控制以及巡游地图中数据完整性控制。
11、与现有技术相比,本发明的有益效果在于:
12、本发明所提供的基于实战化建设的多元巡游定位航道规划与共享平台中,建立了完整的全流程主题公园自动化巡游控制系统及相关设备的控制方法,并将其应用与主题公园的花车巡游控制中,用以实现无线远程巡游花车与多环境设备之间的调度与控制工作,在此基础上,本发明中着重进行了多元巡游定位中航道规划与巡游地图的开发与数据融合处理,用以进一步实现巡游花车在巡游地图中的定位精度控制;巡游花车在巡游地图中的轨迹跟踪控制;巡游花车动态局部运动控制;巡游地图中数据完整性控制等多重效果。
技术特征:
1.一种基于实战化建设的多元巡游定位航道规划与共享平台,其特征在于,具体包括巡游地图航拍模块,巡游地图合成模块与巡游设备控制模块;其中,在巡游地图航拍模块中拍摄场景图片,将场景图片传输至巡游地图合成模块中建立场景地图并获取巡游地图坐标参数,将巡游地图坐标参数与巡游设备控制模块中的巡游控制参数相结合,用以进行巡游设备的无线远程联动运动控制。
2.根据权利要求1所述一种基于实战化建设的多元巡游定位航道规划与共享平台,其特征在于,所述巡游地图航拍模块中,启动gps基站进行无人机巡游定位校准;其中所述无人巡游定位校准中,建立了航道多元数据定位整合模型,用以进行巡游航道漂移纠偏操作。
3.根据权利要求1所述一种基于实战化建设的多元巡游定位航道规划与共享平台,其特征在于,所述巡游地图合成模块中,首先进行多个场景图片位置坐标解算,并根据解算结果进行巡游地图拼接,待巡游地图拼接完成后以巡游地图为基础进行巡游车的动态位置监控。
4.根据权利要求3所述一种基于实战化建设的多元巡游定位航道规划与共享平台,其特征在于,所述多个场景图片位置坐标解算,结合航道多元数据定位整合模型的输出数据,通过获取巡游航道漂移纠偏后的无人机巡游定位姿态数据集p={p1,p2,...,pn},并根据定位姿态数据集计算地图拼接矩阵。
5.根据权利要求3所述一种基于实战化建设的多元巡游定位航道规划与共享平台,其特征在于,将所述多个场景图片位置坐标解算中获得的位置坐标解算数据,与场景地图中的具体特征数据相结合,通过双重计算匹配方式进行巡游地图拼接时间优化。
6.根据权利要求1所述一种基于实战化建设的多元巡游定位航道规划与共享平台,其特征在于,所述巡游设备控制模块,具体包括gnss巡游定位基站,uwb巡游定位基站,扬声器及灯光设备控制与其他车载设备控制。
7.根据权利要求6所述一种基于实战化建设的多元巡游定位航道规划与共享平台,其特征在于,所述gnss巡游定位基站,uwb巡游定位基站中,还在巡游设备控制模块中分别建立了gnss流动站与uwb标签。
8.根据权利要求7所述一种基于实战化建设的多元巡游定位航道规划与共享平台,其特征在于,所述扬声器及灯光设备控制中,还包括巡游音响控制,所述巡游音响控制中,建立了巡游车的动态位置与巡游音响音乐切换联合控制模式。
9.根据权利要求8所述一种基于实战化建设的多元巡游定位航道规划与共享平台,其特征在于,所述巡游设备控制模块中,规定了gnss巡游定位基站,uwb巡游定位基站,扬声器及灯光设备控制与其他车载设备控制的结构安装流程与通信调试流程。
10.根据权利要求1所述一种基于实战化建设的多元巡游定位航道规划与共享平台,其特征在于,所述无线远程联动运动控制,具体包括巡游车定位精度控制,巡游车轨迹跟踪控制,巡游车动态局部运动控制以及巡游地图中数据完整性控制。
技术总结
本发明专利涉及花车巡游控制技术领域,尤其涉及一种基于实战化建设的多元巡游定位航道规划与共享平台。具体包括巡游地图航拍模块,巡游地图合成模块与巡游设备控制模块;其中,在巡游地图航拍模块中拍摄场景图片,将场景图片传输至巡游地图合成模块中建立场景地图并获取巡游地图坐标参数,将巡游地图坐标参数与巡游设备控制模块中的巡游控制参数相结合,用以进行巡游设备的无线远程联动运动控制。本发明用以进一步实现巡游花车在巡游地图中的定位精度控制;巡游花车在巡游地图中的轨迹跟踪控制;巡游花车动态局部运动控制;巡游地图中数据完整性控制等多重效果。
技术研发人员:刘勇华,梁波,赵汝前
受保护的技术使用者:广东省奥纳工程有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!