一种离地检测方法、装置及移动机器人与流程
本发明涉及一种机器人,尤其涉及一种离地检测方法、装置及移动机器人。
背景技术:
1、当前,轮式移动机器人在工作过程中,常常会由于各种原因被人为抱起或被低矮障碍物卡住。为此,在设计这种轮式移动机器人时,还需要进一步地在其上设置离地检测装置,以便于检测出自身是否离地,进而及时暂停工作,保证使用安全,并作为重新工作的依据。
2、在当前现有技术中,判断移动机器人处于“离地状态”还是“着地状态”的技术方案主要有以下两种:
3、(1)悬空检测手段:对移动机器人的轮子转速进行监测,当轮子的转速超过设定阈值,则表示轮子失去了地面摩擦力,并判断为轮子悬空(对移动机器人的多个轮子分别检测),以此认定移动机器人处于“离地状态”,反之则移动机器人处于“着地状态”。
4、(2)落地检测手段:在移动机器人上设置两个防跌落传感器,这两个防跌落传感器设置于移动机器人的后下方,以结合两个防跌落传感器的数据进行判断。在应用这种手段时,需要提前预设一个着地高度,当两个防跌落传感器检测到的距离均为预设着地高度时,则判断接地,反之则判断离地;当两个防跌落传感器都判断着地,则认定移动机器人此时处于“着地状态”;当两个防跌落传感器都判断离地,则认定移动机器人此时处于“离地状态”。
5、发明人研究发现,当实际应用上述方案(1)的悬空检测手段时,在完成这种悬空检测后,存在使用者抱起移动机器人后,移动机器人的轮子还在转动的可能,其检测存在延迟,很可能会误伤使用者。
6、而当实际应用上述方案(2)的落地检测手段时,则很有可能出现误判的情况,在某些存在人为遮挡、环境遮挡或者数据失去执行度的情况下,其有可能会导致防跌落传感器测得的距离数据满足预设的着地高度,而实际上机器人并未着地;例如:当用户用手挡住了防跌落传感器的发射口导致防跌落传感器测得的距离数据满足着地数据判断时,其会认为机器人在地面上,而此时实际上机器还在用户手中,其判断效果不佳,准确率较低。面对这种缺陷,即使是在移动机器人上设置再多的防跌落传感器,也存在误判的情况;此外,设置在移动机器人上的防跌落传感器也不是越多越好,其需考虑到实际成本和实际判断效用。
技术实现思路
1、本发明所要解决的技术问题是:提供一种新型的离地检测方法、装置及移动机器人,以基于准确率更高、应用更加安全方便的检测手段,判断轮式移动机器人处于“离地状态”还是“着地状态”。
2、为了解决上述技术问题,本发明采用的技术方案为:一种离地检测方法,其应用于移动机器人,并包括以下步骤:
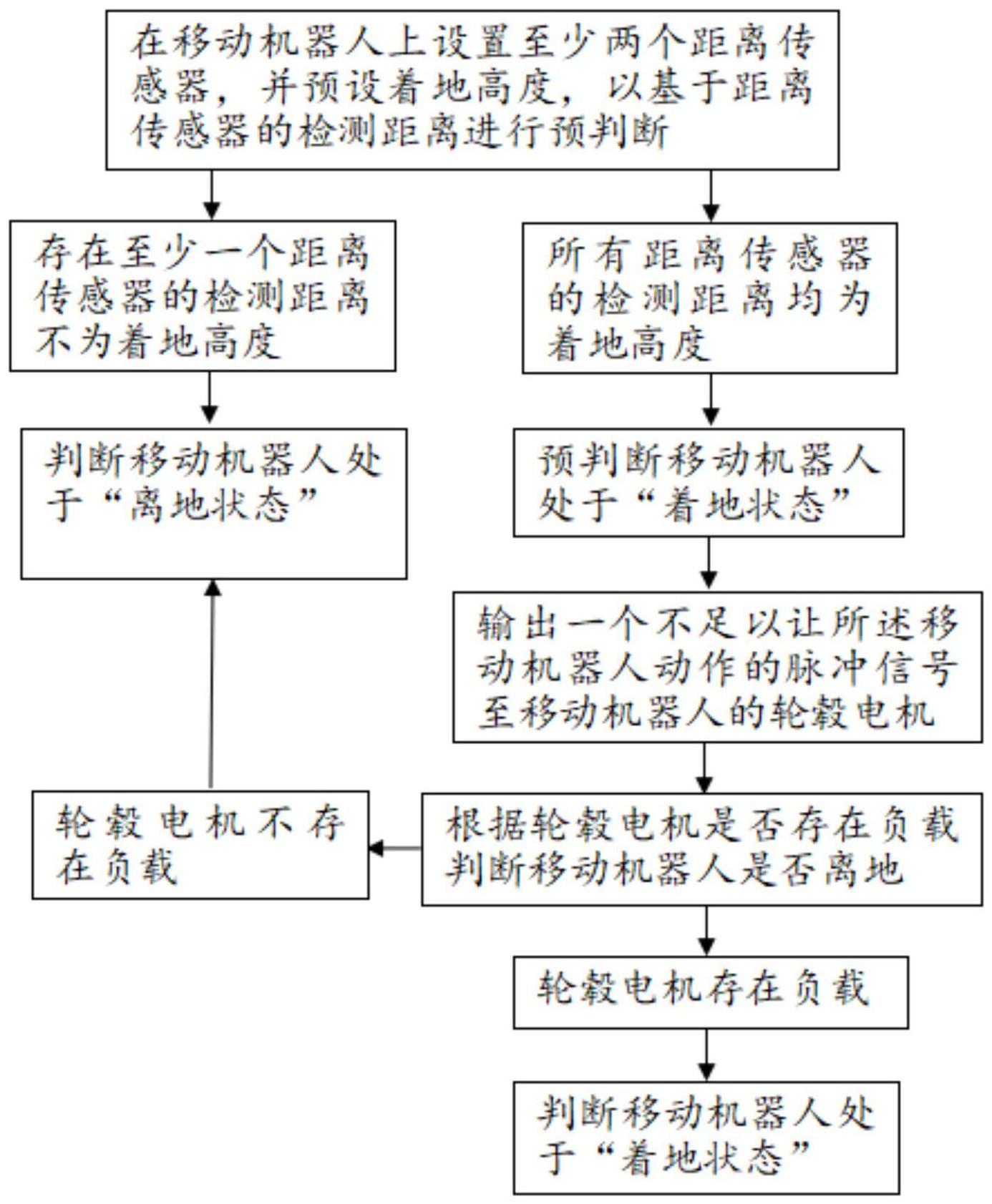
3、s1:为所述移动机器人上设置的距离传感器预设着地高度,所述距离传感器的数量至少为两个,并在所有距离传感器的检测距离均为着地高度时,预判断所述移动机器人着地;
4、s2:当预判断所述移动机器人着地时,输出一个不足以让所述移动机器人动作的脉冲信号至移动机器人的轮毂电机;
5、s3:根据所述轮毂电机是否存在负载判断所述移动机器人是否离地;若所述轮毂电机存在负载,则判断所述移动机器人着地;若所述轮毂电机不存在负载,则判断所述移动机器人离地。
6、进一步的,在本发明所述的离地检测方法中,在所述步骤s1中,当所述移动机器人上存在至少一个距离传感器的检测距离不为着地高度时,则判断所述移动机器人离地。
7、进一步的,在本发明所述的离地检测方法中,在所述步骤s2中,所述脉冲信号为阶跃电流脉冲信号。
8、进一步的,在本发明所述的离地检测方法中,在所述步骤s3中,基于所述轮毂电机反馈的电流和转速判断所述轮毂电机是否存在负载;若所述轮毂电机具有一定的转速,且电流正常,则所述轮毂电机正在转动,所述轮毂电机不存在负载;若所述轮毂电机没有转速且电流升高,则所述轮毂电机没有转动,所述轮毂电机存在负载。
9、相应地,为了解决现有技术方案存在的缺陷和不足,本发明还设计了一种离地检测装置,其应用于移动机器人,并包括:
10、预判断模块,其基于设置于所述移动机器人上的至少两个距离传感器的检测距离进行预判断,以在所有距离传感器的检测距离均为预设的着地高度时,预判断所述移动机器人着地;
11、控制模块,其用于在预判断所述移动机器人着地时,输出一个不足以让所述移动机器人动作的脉冲信号至移动机器人的轮毂电机;
12、确定模块,其用于确定所述轮毂电机是否转动;
13、判断模块,其用于根据所述轮毂电机是否存在负载判断所述移动机器人是否离地;若所述轮毂电机存在负载,则判断所述移动机器人着地;若所述轮毂电机不存在负载,则判断所述移动机器人离地。
14、进一步的,在本发明所述的离地检测装置中,当所述移动机器人上存在至少一个距离传感器的检测距离不为着地高度时,则所述预判断模块判断所述移动机器人离地。
15、进一步的,在本发明所述的离地检测装置中,所述确定模块基于所述轮毂电机反馈的电流和转速判断所述轮毂电机是否存在负载;若所述轮毂电机具有一定的转速,且电流正常,则所述轮毂电机正在转动,所述轮毂电机不存在负载;若所述轮毂电机没有转速且电流升高,则所述轮毂电机没有转动,所述轮毂电机存在负载。
16、此外,本发明还设计了一种移动机器人,包括:至少两个距离传感器及控制器;其中,所述至少两个距离传感器分别与所述控制器连接,所述控制器用于实施本发明上述的离地检测方法。
17、进一步的,在本发明所述的移动机器人中,所述移动机器人上设置有两个距离传感器。
18、进一步的,在本发明所述的移动机器人中,所述距离传感器为防跌落传感器。
19、本发明的有益效果在于:设计了一种全新的应用于移动机器人的离地检测方法,其基于设于移动机器人上的检测距离可以初步预判断移动机器人是处于“离地状态”还是“着地状态”;当预判断移动机器人为“着地状态”时,则再通过输出一个不足以让移动机器人动作的脉冲信号至移动机器人的轮毂电机,以基于轮毂电机是否存在负载判断所述移动机器人是否离地;若轮毂电机在转动(没有地面摩擦力),则说明轮毂电机没有负载,并判断移动机器人还是处于“离地状态”,且不执行移动机器人的后续操作,以免误伤使用者;若该脉冲信号不足以让轮毂电机转动,轮毂电机没有转动,则说明轮子与地面存在摩擦力,轮毂电机具有负载,移动机器人确实回到地面了,则判断并移动机器人处于“着地状态”。由此可见,本发明所设计的这种离地检测方法、装置及移动机器人能够以准确率更高、应用更加安全方便的检测手段,判断轮式移动机器人处于“离地状态”还是“着地状态”,其可靠性高,具有良好的推广前景和应用价值。
技术特征:
1.一种离地检测方法,其应用于移动机器人,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种离地检测方法,其特征在于,在所述步骤s1中,当所述移动机器人上存在至少一个距离传感器的检测距离不为着地高度时,则判断所述移动机器人离地。
3.根据权利要求1所述的一种离地检测方法,其特征在于,在所述步骤s2中,所述脉冲信号为阶跃电流脉冲信号。
4.根据权利要求1所述的一种离地检测方法,其特征在于,在所述步骤s3中,基于所述轮毂电机反馈的电流和转速判断所述轮毂电机是否存在负载;若所述轮毂电机具有一定的转速,且电流正常,则所述轮毂电机正在转动,所述轮毂电机不存在负载;若所述轮毂电机没有转速且电流升高,则所述轮毂电机没有转动,所述轮毂电机存在负载。
5.一种离地检测装置,其应用于移动机器人,其特征在于,包括:
6.根据权利要求5所述的一种离地检测装置,其特征在于,当所述移动机器人上存在至少一个距离传感器的检测距离不为着地高度时,则所述预判断模块判断所述移动机器人离地。
7.根据权利要求5所述的一种离地检测装置,其特征在于,所述确定模块基于所述轮毂电机反馈的电流和转速判断所述轮毂电机是否存在负载;若所述轮毂电机具有一定的转速,且电流正常,则所述轮毂电机正在转动,所述轮毂电机不存在负载;若所述轮毂电机没有转速且电流升高,则所述轮毂电机没有转动,所述轮毂电机存在负载。
8.一种移动机器人,其特征在于,包括:至少两个距离传感器及控制器;其中,所述至少两个距离传感器分别与所述控制器连接,所述控制器用于实施如权利要求1-4中任意一项所述的离地检测方法。
9.根据权利要求8所述的一种移动机器人,其特征在于,所述移动机器人上设置有两个距离传感器。
10.根据权利要求8或权利要求9所述的一种移动机器人,其特征在于,所述距离传感器为防跌落传感器。
技术总结
本发明公开了一种离地检测方法,其应用于移动机器人,其包括以下步骤:S1:为所述移动机器人上设置的距离传感器预设着地高度,所述距离传感器的数量至少为两个,并在所有距离传感器的检测距离均为着地高度时,预判断所述移动机器人着地;S2:当预判断所述移动机器人着地时,输出一个不足以让所述移动机器人动作的脉冲信号至移动机器人的轮毂电机;S3:根据所述轮毂电机是否存在负载判断所述移动机器人是否离地;若所述轮毂电机存在负载,则判断所述移动机器人着地;若所述轮毂电机不存在负载,则判断所述移动机器人离地。相应地,本发明还公开了一种用于实施上述离地检测方法的离地检测装置和移动机器人。
技术研发人员:周展鸿,袁书建,玛赫英生
受保护的技术使用者:赋之科技(深圳)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!