行驶设备及其控制方法与流程
本文描述的本发明构思的实施例涉及一种行驶设备及其控制方法。
背景技术:
1、一般而言,在诸如机器人或无人驾驶车辆等自主行驶设备中,有必要在移动时检测前面的障碍物或地板表面上的高度差以防止碰撞或翻倒。对于检测此类障碍物或台阶,使用了使用激光雷达(光探测和测距)传感器的方法、使用近红外距离传感器或超声传感器的方法、使用3d相机等来检测地板的方法以及通过编辑地图来设置机器人的禁止进入区域的方法等。
2、然而,由于激光雷达传感器是昂贵的部件,因此自主行驶设备的制造价格不可避免地增长,这阻碍了自主行驶设备的普及。使用近红外距离传感器的传统方法具有因自主行驶设备在以高速行驶时的响应延迟而翻倒的风险,并且可能因取决于地板条件的异物而被损坏或退化。另外,用3d相机检测地板的方法的缺点是因在有限的区域中产生噪声而发生故障的可能性很大。另外,使用地图来设置禁止区域的方法的问题在于,如果发生自主行驶设备的位置跟踪错误,则无法使用。
技术实现思路
1、本发明构思的实施例提供了一种行驶设备及其控制方法,以同时检测前面的障碍物和地板表面高度差。
2、本发明构思的实施例提供了一种行驶设备及其控制方法,以防止在移动过程中与操作者碰撞。
3、本发明构思的技术目的不限于上述目的,并且根据以下描述,其他未提及的技术目的对于本领域技术人员而言将变得显而易见。
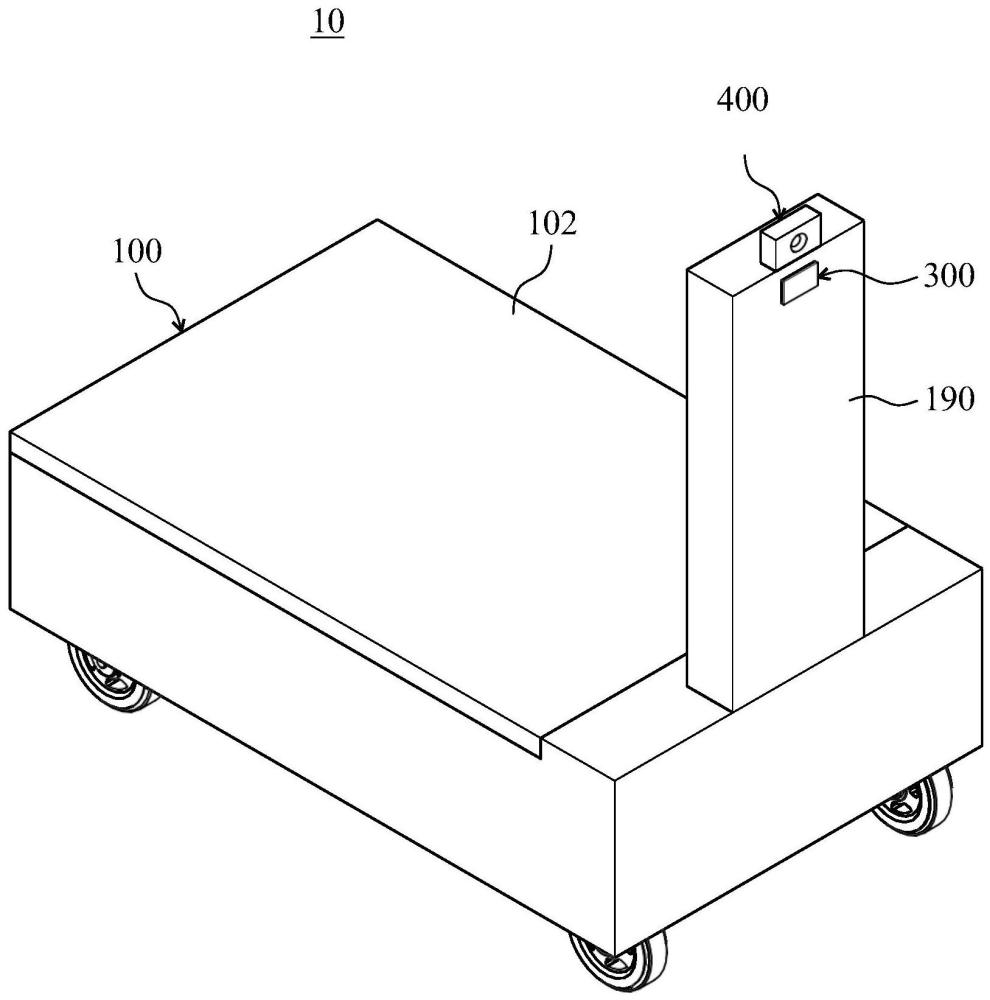
4、本发明构思提供了一种行驶设备。所述行驶设备包括:主体;驱动单元,所述驱动单元被配置为提供驱动力,使得所述主体能够行驶;标记输出单元,所述标记输出单元被配置为在所述主体的预定行驶方向上照射标记;图像获取单元,所述图像获取单元被配置为通过对照射的所述标记进行成像来获取标记图像;以及确定单元,所述确定单元用于根据从所述图像获取单元获取的所述标记图像来确定所述预定行驶方向是否存在风险因素。
5、在实施例中,所述标记输出单元照射可见激光或光。
6、在实施例中,所述标记输出单元向所述预定行驶方向的底表面输出箭头,所述箭头的方向指示所述预定行驶方向。
7、在实施例中,所述标记输出单元在朝向所述预定行驶方向的所述底表面向下倾斜的方向上照射所述标记。
8、在实施例中,所述确定单元通过存储被照射到不具有所述风险因素的所述底表面的所述标记的参考图像并且将从所述图像获取单元获取的所述标记图像与所述参考图像进行比较来确定所述预定行驶方向上是否存在所述风险因素。
9、在实施例中,所述的行驶设备还包括控制单元,所述控制单元被配置为如果通过所述确定单元确定存在所述风险因素,则控制所述驱动单元以停止行驶、避开所述风险因素或降低行驶速度。
10、在实施例中,所述风险因素包括障碍物或高度差。
11、在实施例中,如果所述风险因素是障碍物,则所述控制单元控制所述驱动单元以停止行驶或避开所述障碍物。
12、在实施例中,如果所述风险因素是高度差,则所述控制单元控制所述驱动单元以根据所述高度差之间的距离停止行驶或降低行驶速度。
13、在实施例中,所述标记是箭头形状,所述箭头形状指示所述预定行驶方向。
14、本发明构思提供了一种行驶设备控制方法。所述行驶设备控制方法包括:向预定行驶方向照射标记;对照射的所述标记进行成像以获取标记图像;以及根据获取的所述标记图像来确定所述预定行驶方向上是否存在风险因素。
15、在实施例中,确定是否存在所述风险因素包括通过将照射到没有所述风险因素的底表面的所述标记的参考图像与所述标记图像进行比较来确定所述预定行驶方向是否存在所述风险因素。
16、在实施例中,所述行驶设备控制方法还包括如果在确定是否存在所述风险因素时所述风险因素被确定为障碍物,则控制所述行驶设备的所述驱动单元以停止所述行驶设备的行驶或避开障碍物。
17、在实施例中,所述行驶设备控制方法还包括如果在确定是否存在所述风险因素时所述风险因素被确定为高度差,则控制所述行驶设备的所述驱动单元以根据所述高度差之间的距离停止所述行驶设备的行驶或降低行驶速度。
18、在实施例中,所述标记由从安装在所述行驶设备处的所述标记输出单元输出的可见激光或光提供。
19、在实施例中,所述标记朝向所述预定行驶方向的底表面向下倾斜。
20、本发明构思提供了一种行驶设备。所述行驶设备包括:主体,所述主体具有用于装载对象的装载器;驱动单元,所述驱动单元被配置为具有装配在所述主体的底部处的驱动轮和用于驱动所述驱动轮的驱动单元;标记输出单元,所述标记输出单元装配在所述主体的前部处并且被配置为向所述主体的预定行驶方向照射标记;图像获取单元,所述图像获取单元装配在所述主体的前部处并且被配置为对照射的所述标记进行成像并获取标记图像;确定单元,所述确定单元被配置为根据从所述图像获取单元获取的所述标记图像来确定所述预定行驶方向是否存在风险因素;以及控制单元,所述控制单元被配置为基于是否存在所述风险因素来控制所述驱动单元。
21、在实施例中,所述确定单元通过存储被照射到不具有所述风险因素的底表面的所述标记的参考图像并且将从所述图像获取单元获取的所述标记图像与所述参考图像进行比较来确定所述预定行驶方向是否存在所述风险因素。
22、在实施例中,如果所述确定单元确定存在所述风险因素,则所述控制单元控制所述驱动单元以停止行驶或避开所述风险因素或降低行驶速度。
23、在实施例中,所述标记输出单元被设置为向所述预定行驶方向的底表面照射可见激光或光,并且所述标记是箭头形状,所述箭头形状的方向为所述预定行驶方向。
24、根据本发明构思的实施例,通过使用照射在地板上的标记来检测地板环境,如果行驶设备进入开放式格栅地板环境或楼梯等以进行修理或更换生产线内的设备,则可以防止翻倒事故。
25、根据本发明构思的实施例,可以通过使周围操作者(步行者)知悉行驶设备的行驶方向来确保行驶设备和操作者的安全。
26、本发明构思的效果不限于上述效果,并且根据以下描述,其他未提及的效果对于本领域技术人员而言将变得显而易见。
技术特征:
1.一种行驶设备,包括:
2.根据权利要求1所述的行驶设备,其中所述标记输出单元照射可见激光或光。
3.根据权利要求2所述的行驶设备,其中所述标记输出单元向所述预定行驶方向的底表面输出箭头,所述箭头的方向指示所述预定行驶方向。
4.根据权利要求2所述的行驶设备,其中所述标记输出单元在朝向所述预定行驶方向的所述底表面向下倾斜的方向上照射所述标记。
5.根据权利要求2所述的行驶设备,其中所述确定单元通过存储被照射到不具有所述风险因素的所述底表面的所述标记的参考图像并且将从所述图像获取单元获取的所述标记图像与所述参考图像进行比较来确定所述预定行驶方向上是否存在所述风险因素。
6.根据权利要求5所述的行驶设备,还包括控制单元,所述控制单元被配置为如果通过所述确定单元确定存在所述风险因素,则控制所述驱动单元以停止行驶、避开所述风险因素或降低行驶速度。
7.根据权利要求5所述的行驶设备,其中所述风险因素包括障碍物或高度差。
8.根据权利要求5所述的行驶设备,其中如果所述风险因素是障碍物,则所述控制单元控制所述驱动单元以停止行驶或避开所述障碍物。
9.根据权利要求5所述的行驶设备,其中如果所述风险因素是高度差,则所述控制单元控制所述驱动单元以根据所述高度差之间的距离停止行驶或降低行驶速度。
10.根据权利要求1所述的行驶设备,其中所述标记是箭头形状,所述箭头形状的方向指示所述预定行驶方向。
11.一种行驶设备控制方法,包括:
12.根据权利要求11所述的行驶设备控制方法,其中确定是否存在所述风险因素包括通过将照射到没有所述风险因素的底表面的所述标记的参考图像与所述标记图像进行比较来确定所述预定行驶方向是否存在所述风险因素。
13.根据权利要求12所述的行驶设备控制方法,还包括:
14.根据权利要求12所述的行驶设备控制方法,进一步包括:
15.根据权利要求12所述的行驶设备控制方法,其中所述标记由从安装在所述行驶设备处的所述标记输出单元输出的可见激光或光提供。
16.根据权利要求12所述的行驶设备控制方法,其中所述标记朝向所述预定行驶方向的底表面向下倾斜。
17.一种行驶设备,包括:
18.根据权利要求17所述的行驶设备,其中所述确定单元通过存储被照射到不具有所述风险因素的底表面的所述标记的参考图像并且将从所述图像获取单元获取的所述标记图像与所述参考图像进行比较来确定所述预定行驶方向是否存在所述风险因素。
19.根据权利要求18所述的行驶设备,其中如果所述确定单元确定存在所述风险因素,则所述控制单元控制所述驱动单元以停止行驶或避开所述风险因素或降低行驶速度。
20.根据权利要求17所述的行驶设备,其中所述标记输出单元被设置为向所述预定行驶方向的底表面照射可见激光或光,并且
技术总结
本发明构思提供了一种行驶设备。所述行驶设备包括:主体;驱动单元,所述驱动单元被配置为提供驱动力,使得所述主体能够行驶;标记输出单元,所述标记输出单元被配置为在所述主体的预定行驶方向上照射标记;图像获取单元,所述图像获取单元被配置为通过对照射的所述标记进行成像来获取标记图像;以及确定单元,所述确定单元用于根据从所述图像获取单元获取的所述标记图像来确定所述预定行驶方向是否存在风险因素。
技术研发人员:权志昱
受保护的技术使用者:细美事有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!