一种通用非线性多智能体分层自适应容错协同控制方法
本发明针对通用非线性多智能体执行器故障和随机扰动问题,设计一种分层自适应容错协同控制方法,属于容错控制领域。
背景技术:
1、近些年来,分布式多智能体系统的控制方法受到了广泛研究。多智能体系统涵盖范围、领域十分广泛,相应控制方法可应用多无人机、多无人车、多无人艇、多无人潜水器等领域。如多无人机,目前可广泛应用于森林火情监测、电网巡检、协同作战等领域。然而,多智能体在执行任务时,可能被出现各种意外情况影响。如果对各种影响处理不及时,很可能会导致任务失败。在各种影响情况中,故障是最严重的一种,如无人机一旦出现故障,很可能会导致坠机,造成极大的损失。执行器故障是常见的一种故障形式,一旦发生执行器故障,往往会对智能体的性能产生影响,严重时甚至会导致智能体之间相互碰撞或任务失败。因此,对多智能体系统的容错控制方法研究具有十分重要的现实意义
技术实现思路
1、本发明针对多智能体系统在执行任务过程中可能遇到的执行器故障与随机扰动问题,目的在于设计一种针对通用非线性多智能体系统的容错协同控制方法,保证多智能体系统在执行器故障的情况下仍能在一定的误差范围内实现对领导者的跟踪。
2、为了实现上述目的,本发明采用以下技术方案:
3、一种通用非线性多智能体分层自适应容错协同控制方法,所述方法包括以下步骤:
4、步骤一,建立通用非线性多智能体动力学模型;
5、步骤二,建立执行器故障函数,并将之带入步骤一中多智能体动力学模型,形成多智能体执行器故障下的动力学模型;
6、步骤三,设计分数阶滑模估计器,利用邻居信息对领导者信息进行估计;
7、步骤四,使用自适应神经网络方法对所述多智能体执行器故障下的动力学模型中的未知非线性项进行学习,得到估计信息;
8、步骤五,利用所述领导者的估计信息与步骤四中对非线性未知项的估计信息,采用反步法与nussbaum函数方法设计分布式容错协同控制率。
9、进一步的,所述步骤一中建立的通用非线性多智能体动力学模型为:
10、
11、其中,i表示该智能体的序号,xiυ表示系统的第υ阶状态信息,xin表示智能体第n阶状态信息;dax表示为x的分数或整数阶导数,a∈(0,1]为导数阶次,当a=1时表示该多智能体系统为整数阶系统,当a≠1时,该多智能体系统为分数阶系统;代表已知函数,代表强未知非线性函数,xi1和ui代表系统的输出信息和输入信息,代表连续时变的未知扰动。
12、进一步的,所述步骤二中的建立执行器故障函数为:
13、ui=ρiui0+bif;
14、其中,ui0是所设计的控制信号,ρi代表效率损失因子,bif代表偏差故障;
15、将所建立的执行器故障函数(2)带入到多智能体动力学模型(1)中,所形成的执行器故障下多智能体动力学模型为:
16、
17、其中,为强未知非线性函数,为包含故障的强未知非线性函数。
18、进一步的,所述步骤三具体包括以下过程:
19、基于邻居信息,构建如下分数阶滑模估计器:
20、
21、其中,β1和β2为待设计正参数,和分别为第i个和第j个智能体系统估计的领导者信息,xi0为实际领导者信息,aij与bi分别表示第i个智能体与第j个跟随者邻居的通讯权重和第i个智能体与领导者的通讯权重。
22、进一步的,所述步骤四具体包括以下过程:
23、步骤4.1:首先采用傅里叶级数展开方法对所述未知扰动进行估计:
24、
25、其中,为常数向量,wihυ1,…,wihυq为傅里叶级数展开的参数,q为参数的个数并且为奇数;代表有界转换误差,随着q的增加,该误差变小;代表基函数,具体为:
26、
27、其中,k=1,2,…,(q-1)/2为定义的参数,t是未知扰动的时间周期,t表示时间;
28、步骤4.2:使用模糊神经网络对执行器故障下动力学模型中的强未知非线性项进行学习:
29、
30、其中,fiυ为模糊神经网络的输出,是常数向量,表示傅里叶级数展开的参数,n2表示输出层中神经元数量,εiυ0表示转换误差,为模糊基向量,1≤ξ2≤n2且为整数,是模糊基函数,表达为:
31、
32、其中,为模糊神经网络输入,为第ξ1个输入,1≤ξ1≤n1且为整数,n1为模糊神经网络输入的个数,是中心向量,是宽度向量,定义和为中心向量的集总向量与宽度向量的集总向量;
33、步骤4.3:利用模糊神经网络学习后得到的理想结果表示为:
34、
35、其中,是最小学习误差,为常数向量的最优值,为对未知扰动估计的常数向量,和分别是中心向量集总向量ciυ和宽度向量集总向量ζiυ最优值;
36、步骤4.4:最终fiυ估计值表示为:
37、
38、其中,分别为使用自适应方法对最优值进行估计得到的估计值,使用时,υ=1,2,…,n。
39、进一步的,所述步骤五具体包括以下过程:
40、第1步,当υ=1时,利用步骤三种估计的领导者信息构建第i个智能体的理想参考信号其中代表理想参考位置与所估计的领导者位置的距离;
41、定义输出跟踪误差为xi1为多智能体输出状态信息,得到第一步虚拟控制律为:
42、
43、其中k11>0为设计的参数;
44、第2步,当υ=2,3,…,n-1时,定义跟踪误差siυ=xiυ-xiυd,其中xiυd是由前一步得到的虚拟控制律;得到第υ步虚拟控制律为:
45、
46、其中kυ1>0为设计的参数;
47、第3步,当υ=n时,定义跟踪误差sin=xin-xind,其中xind是前一步得到的虚拟控制律;
48、利用nussbuam函数方法设计的控制率表示为:
49、
50、其中,kn1>0为设计的参数,为nussbaum函数,θi为设计的向量,其导数为:
51、
52、其中,分别为使用自适应方法对最优值进行估计得到的估计值,υ=1,2,…,n。
53、本发明具有以下优点:
54、(1)本发明所设计的控制方法包含范围较广,既可以对整数阶系统进行控制,也可以对分数阶系统进行控制。
55、(2)本发明考虑了通用非线性多智能体系统遭遇执行器故障和随机扰动的容错控制问题,所设计的容错控制方案确保了执行器故障下多智能体系统的稳定运行,使得智能体可以对期望信号进行跟踪。
56、(3)本发明采用nussbuam函数与自适应神经网络方法对执行器故障引起的效率损失和作动偏差进行处理,使得故障对系统的影响被大大削弱,增强了系统的安全性。
技术特征:
1.一种通用非线性多智能体分层自适应容错协同控制方法,其特征在于:所述方法包括以下步骤:
2.根据权利要求1所述的控制方法,其特征在于:所述步骤一中建立的通用非线性多智能体动力学模型为:
3.根据权利要求1所述的控制方法,其特征在于:所述步骤二中的建立执行器故障函数为:
4.根据权利要求1所述的控制方法,其特征在于:所述步骤三具体包括以下过程:
5.根据权利要求1所述的控制方法,其特征在于:所述步骤四具体包括以下过程:
6.根据权利要求1所述的控制方法,其特征在于:所述步骤五具体包括以下过程:
技术总结
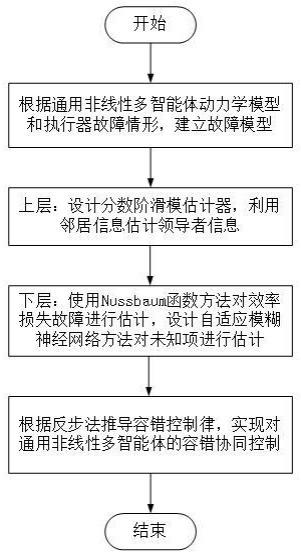
本发明公布了一种通用非线性多智能体分层自适应容错协同控制方法,用于解决多智能体系统的执行器故障问题。该方法首先建立通用非线性多智能体的动力学模型,考虑执行器故障与随机扰动情况,建立非线性多智能体执行器故障模型。其次,在控制器上层设计分数阶滑模估计器对领导者信息进行估计,在控制器下层利用Nussbaum函数方法和自适应模糊神经网络方法对效率损失故障和偏差故障与随机扰动符合生成的未知项进行估计。最后,设计分布式容错控制律。本发明可用于对通用非线性多智能体执行器故障的容错控制。
技术研发人员:余自权,周瑞丰,孙朋悦,姜斌,程月华
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!