一种伺服控制系统中LVDT位移传感器信号采集方法与流程
本发明涉及工业伺服控制系统的精度控制技术,具体是一种伺服控制系统中的lvdt位移传感器的位移信号精确采集方法,更为确切的说,是一种油动机伺服控制系统中的油动机开度位移信号精确采集方法。
背景技术:
1、油动机伺服控制系统,是常见于汽轮机组、水电机组、工业制造等设备上的自动控制操作系统,其以油动机作为控制指令的执行机构。
2、在油动机伺服控制系统中,油动机是否准确执行控制指令,需要采用lvdt位移传感器对油动机的开度位移信号进行随动检测。也就是说,在油动机的伺服控制系统,以lvdt位移传感器检测油动机的开度位移信号,通过对lvdt位移传感器的电压信号数据的采集,掌握油动机的实际开度位移,进而对油动机进行半开环控制。
3、当前,对油动机伺服控制系统中的lvdt位移传感器的电压信号数据的采集,是在采集周期内采集一个随机值,伺服控制器以此与所接收的控制指令进行pid运算,向伺服阀输出控制信号。
4、然而,由于油动机是靠液压油作为介质而脉冲产生动力进行开合动作的,油压脉冲的不稳定性会引起当前执行时刻的执行抖动,这就会导致lvdt位移传感器采集到的位移信号是一个区间动态范围内的随机值。那么,在油动机发生执行抖动的情况下,在采集周期内采集到的lvdt位移传感器的电压信号数据,反映出的是油动机在当前执行时刻,因执行抖动而产生开度位移动态的某一点值,非油动机真实开度位移信号的反映,与油动机的真实开度位移信号存在误差。伺服控制器据此而进行的行程整定、pid运算,必然会造成整定零值和幅值误差过大,误差多次叠加之后,直接造成采集值与实际值偏差大,不能可靠地掌握油动机在当前执行时刻的真实开度位移,影响油动机伺服控制的精准性,甚至会对应用该油动机伺服控制系统的机组(例如汽轮机组)的运行带来安全隐患。
5、经对已公开专利文献进行检索分析,至今未发现有解决此技术问题的技术措施被披露。
技术实现思路
1、本发明的技术目的在于:针对上述油动机伺服控制系统的特殊性,以及现有技术的不足,提供一种有利于精准获取伺服控制系统中的油动机真实位移信号的lvdt位移传感器信号采集方法。
2、本发明的技术目的通过下述技术方案实现,一种伺服控制系统中lvdt位移传感器信号采集方法,所述采集方法采取的技术措施是:
3、-初级线圈保持激励状态;
4、-分别获取次一级线圈和次二级线圈在采集时间段内的优选电压信号数据;
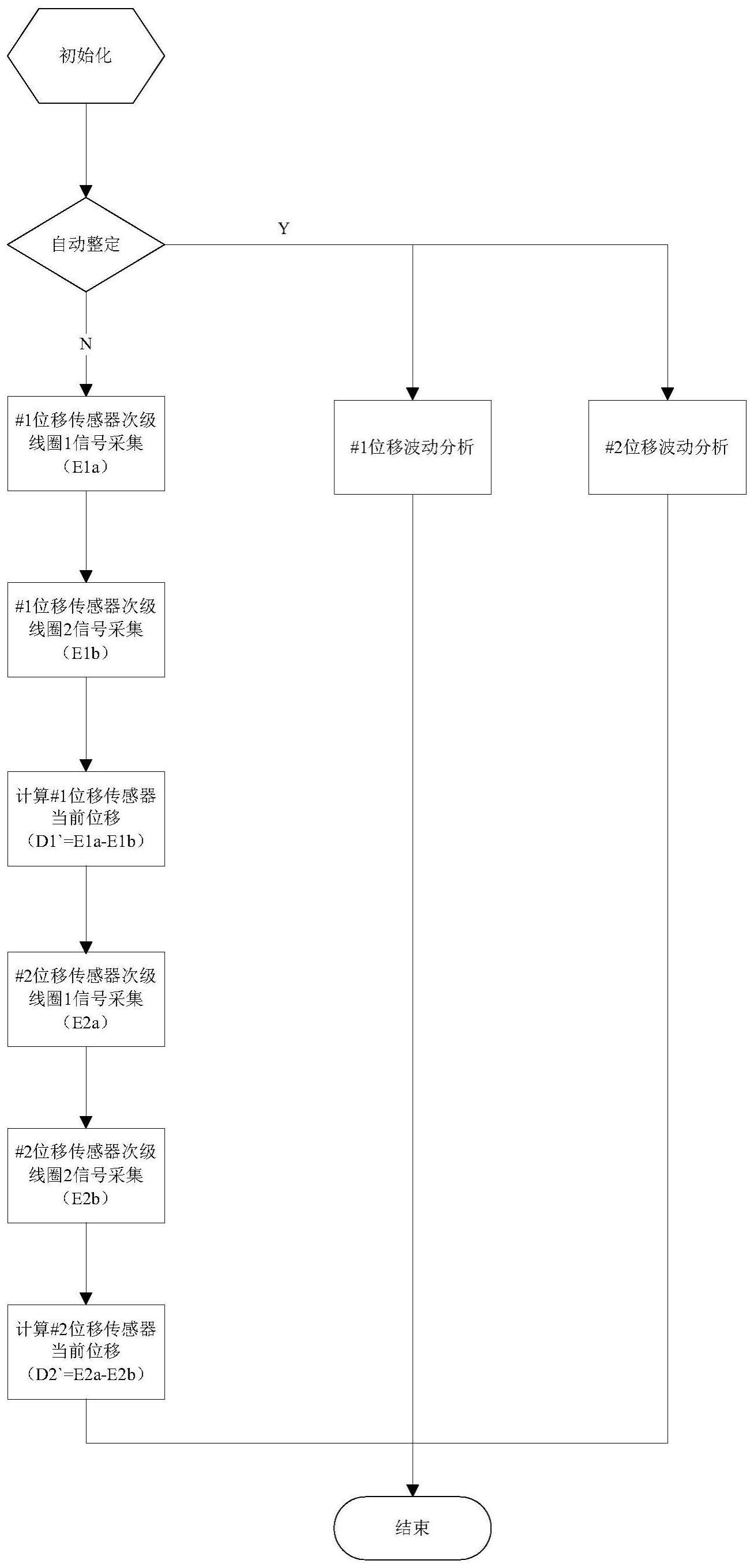
5、-将次一级线圈的优选电压信号数据,与次二级线圈的优选电压信号数据进行求差处理,获得lvdt位移传感器的当前位移信号数据。
6、上述技术措施针对于上述油动机伺服控制系统的特殊性,将lvdt位移传感器的次一级线圈和次二级线圈在采集时间段内采集到的电压信号数据,经优选而形成对应的优选电压信号数据,据此获得的lvdt位移传感器的当前位移信号数据,有效消除了油动机在当前执行时刻,因执行抖动而对lvdt位移传感器所采集信号数据的干扰影响。也就是说,即便是在油动机发生执行抖动的情况下,通过上述技术措施所获得的lvdt位移传感器的当前位移信号数据,能够尽可能真实、可靠地反映出油动机在当前执行时刻的开度位移信号,基本消除采集值与实际值之间的误差,有利于可靠地保障油动机伺服控制的精准性。
7、作为优选方案之一,所述优选电压信号数据的获取是,在采集时间段内,采集对应次级线圈的多组电压信号数据;
8、将采集到的多组电压信号数据,按照从小到大的顺序进行冒泡排序;
9、过滤掉偏小和偏大的电压信号数据,摘取中间段的多组电压信号数据,将这些摘取的中间段电压信号数据求平均值处理,获得对应次级线圈的优选电压信号数据。
10、上述技术措施,在采集时间段内,对lvdt位移传感器的对应次级线圈(即次一级线圈或次二级线圈)采集多组电压信号数据,将这些数据的中间段多组数据经求平均值而合理地获得优选电压信号数据,如此,在油动机发生执行抖动的情况下,可靠地消除了执行抖动对lvdt位移传感器所采集信号数据的干扰影响,使所获得的优选电压信号数据,能够尽可能真实地反映出油动机在当前执行时刻的实际开度位移信号,进而有利于精准获取油动机伺服控制系统中的油动机真实位移信号。
11、进一步的,所述优选电压信号数据获取的采集时间段≤20ms,采集周期随动于伺服控制器的程序执行循环周期;
12、同一采集时间段内的前、后次采集电压信号数据的间隔时间为15~25μs。
13、上述技术措施基于伺服控制器的常见模拟量采集芯片(ads8320e芯片)的采集速度,在允许条件下尽可能快的采集,从而有利于精准获取油动机伺服控制系统中的油动机真实位移信号。
14、进一步的,所述优选电压信号数据获取的电压信号数据为8~14组;
15、摘取的中间段电压信号数据为4~8组。
16、上述技术措施基于上述模拟芯片的采集速度,以及数据处理能力,获取的优选电压信号数据尽可能的精确,受执行抖动的干扰影响小。
17、作为优选方案之一,所述伺服控制系统为汽轮机组用的油动机伺服控制系统;
18、所述lvdt位移传感器的铁芯与对应油动机连接,所述lvdt位移传感器的初级线圈、次一级线圈、次二级线圈与油动机伺服控制系统的伺服控制器连接。
19、上述技术措施有利于汽轮机组的油动机伺服控制系统精准、稳定、安全的运行。
20、进一步的,所述油动机连接的lvdt位移传感器为相对独立、形成冗余配置的两支。该技术措施针对于汽轮机组的油动机伺服控制系统对运行稳定性的技术要求,通过两支lvdt位移传感器在油动机上的冗余配置,能够有效确保油动机的半开环控制稳定、可靠地实现。
21、进一步的,所述lvdt位移传感器为六线制结构。该技术措施的lvdt位移传感器,主要由铁芯、1组初级线圈、2组次级线圈(即次一级线圈和次二级线圈)等组成,具有体积小、精度高、性能稳定、可靠性好、寿命长等技术优势。
22、本发明的有益技术效果是:上述技术措施针对于油动机伺服控制系统的特殊性,在采集时间段内对lvdt位移传感器的对应次级线圈(即次一级线圈或次二级线圈)采集多组电压信号数据,将这些数据的中间段多组数据经求平均值而合理地获得优选电压信号数据,据此获得的lvdt位移传感器的当前位移信号数据,有效消除了油动机在当前执行时刻,因执行抖动而对lvdt位移传感器所采集信号数据的干扰影响。也就是说,即便是在油动机发生执行抖动的情况下,通过上述技术措施所获得的lvdt位移传感器的当前位移信号数据,能够尽可能真实、可靠地反映出油动机在当前执行时刻的开度位移信号,基本消除采集值与实际值之间的误差,有利于可靠保障油动机伺服控制的精准性。
技术特征:
1.一种伺服控制系统中lvdt位移传感器信号采集方法,其特征在于:
2.根据权利要求1所述伺服控制系统中lvdt位移传感器信号采集方法,其特征在于:
3.根据权利要求2所述伺服控制系统中lvdt位移传感器信号采集方法,其特征在于:
4.根据权利要求2或3所述伺服控制系统中lvdt位移传感器信号采集方法,其特征在于:
5.根据权利要求1所述伺服控制系统中lvdt位移传感器信号采集方法,其特征在于:
6.根据权利要求5所述伺服控制系统中lvdt位移传感器信号采集方法,其特征在于:
7.根据权利要求5或6所述伺服控制系统中lvdt位移传感器信号采集方法,其特征在于:
技术总结
本发明公开了一种伺服控制系统中LVDT位移传感器信号采集方法,所述采集方法采取的技术措施是:初级线圈保持激励状态;分别获取次一级线圈和次二级线圈在采集时间段内的优选电压信号数据;将次一级线圈的优选电压信号数据,与次二级线圈的优选电压信号数据进行求差处理,获得LVDT位移传感器的当前位移信号数据。本发明有效消除了油动机在当前执行时刻,因执行抖动而对LVDT位移传感器所采集信号数据的干扰影响,所获得的LVDT位移传感器的当前位移信号数据,能够尽可能真实、可靠地反映出油动机在当前执行时刻的开度位移,基本消除采集值与实际值之间的误差,有利于可靠保障油动机伺服控制的精准性。
技术研发人员:李杰,陆晓阳
受保护的技术使用者:德阳瑞能电力科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!