一种核电隧洞清理机器人自动驾驶方法、系统及电子设备与流程
本发明涉及自动驾驶领域,尤其涉及一种核电隧洞清理机器人自动驾驶方法、系统及电子设备。
背景技术:
1、国内沿海核电站大多从近海取水口处修建引水隧洞,引取海水作为最终冷却水。当引水隧洞长期使用后,积聚的海生物、淤泥及其它杂质容易导致取水口堵塞,造成核电站冷源取水堵塞事件,因此需要对隧洞内的海生物、淤泥及其它杂质定期清理。可以利用一些大型清理设备和收集设备进行隧洞海生物、淤泥及其它杂质的清理。目前,主要通过工作人员在隧洞中手持操作器近距离控制这些设备沿隧洞行驶,以避免损伤洞壁。这一控制方式操作复杂、响应慢,无法及时判断设备行驶的轨迹,影响工作效率,且隧洞中存在有毒气体,工作人员的作业风险较高。
技术实现思路
1、本发明要解决的技术问题在于,提供一种核电隧洞清理机器人自动驾驶方法、系统及电子设备。
2、本发明解决其技术问题所采用的技术方案是:提供一种核电隧洞清理机器人自动驾驶方法,包括以下步骤:
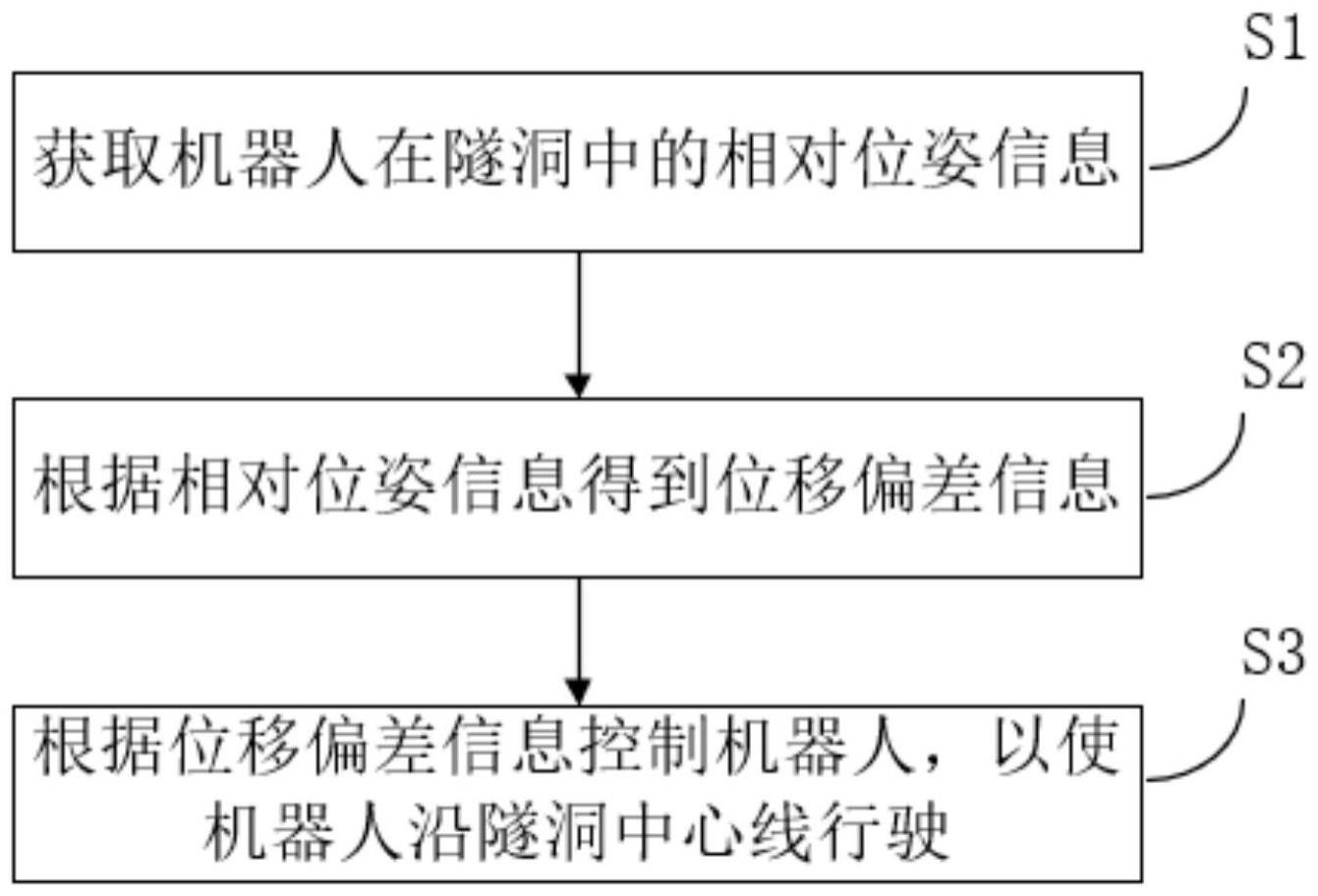
3、s1、获取机器人在隧洞中的相对位姿信息;
4、s2、根据所述相对位姿信息得到位移偏差信息;
5、s3、根据所述位移偏差信息控制所述机器人,以使所述机器人沿隧洞中心线行驶。
6、优选的,所述相对位姿信息包括所述机器人在隧洞中的位置和方向信息,
7、在所述步骤s1中,包括:
8、s11、获取所述机器人周围环境的点云数据;
9、s12、根据所述点云数据得到所述机器人在隧洞中的位置和方向信息。
10、优选的,在所述步骤s12中,包括:
11、对所述点云数据进行滤波处理;
12、将处理后的点云数据进行霍夫变换;
13、根据变换后的点云数据得到最长的两条直线段;
14、判断所述两条直线段所经过的点云数据中的数据点的数量是否大于阈值;若否,则转至步骤s11;
15、若是,则根据所述两条直线段获得隧洞左、右两侧壁的坐标信息,根据所述隧洞左、右两侧壁的坐标信息得到所述机器人在隧洞中的位置和方向信息。
16、优选的,在所述步骤s1中,包括:
17、通过设置在所述机器人上的检测设备获取所述相对位姿信息。
18、优选的,在步骤s3中,包括:
19、根据所述位移偏差信息判断所述机器人是否不偏转且在所述隧洞中心线上,若是,则控制所述机器人直行;
20、根据所述位移偏差信息判断所述机器人是否偏转向左且在所述隧洞中心线上,若是,则控制所述机器人右转;
21、根据所述位移偏差信息判断所述机器人是否偏转向右且在所述隧洞中心线上,若是,则控制所述机器人左转;
22、根据所述位移偏差信息判断所述机器人是否偏转向右且在所述隧洞中心线左侧;若是,则控制所述机器人直行;
23、根据所述位移偏差信息判断所述机器人是否偏转向左或不偏转,且在所述隧洞中心线左侧;若是,则控制所述机器人右转并前进;
24、根据所述位移偏差信息判断所述机器人是否偏转向左且在所述隧洞中心线右侧;若是,则控制所述机器人直行;
25、根据所述位移偏差信息判断所述机器人是否偏转向右或不偏转,且在所述隧洞中心线右侧;若是,则控制所述机器人左转并前进。
26、优选的,在步骤s3中,所述根据所述位移偏差信息控制所述机器人步骤包括:
27、根据所述位移偏差信息采用pid方法对所述机器人进行调节。
28、优选的,所述方法还包括:
29、获取所述机器人的运行状态信息,并根据所述运行状态信息判断所述机器人是否发生故障,若是,则不允许所述机器人前进。
30、优选的,所述方法还包括:
31、获取所述机器人与隧洞左、右两侧壁的压力值;
32、判断是否所述机器人与隧洞左侧壁的压力值大于第一上限阈值且所述机器人与隧洞右侧壁的压力值小于第一下限阈值,若是,则控制所述机器人右转;
33、判断是否所述机器人与隧洞左侧壁的压力值小于第一下限阈值且所述机器人与隧洞右侧壁的压力值大于第一上限阈值,若是,则控制所述机器人左转。
34、本发明还提供一种核电隧洞清理机器人自动驾驶系统,包括:
35、行驶信息获取模块,用于获取机器人在隧洞中的相对位姿信息;
36、行驶信息处理模块,用于根据所述相对位姿信息得到位移偏差信息,并根据所述位移偏差信息控制所述机器人,以使所述机器人沿隧洞中心线行驶。
37、本发明还提供一种电子设备,包括处理器和存储器,所述存储器用于存储计算机程序,所述处理器用于执行所述存储器的计算机程序以实现上述任意一项所述的核电隧洞清理机器人自动驾驶方法。
38、实施本发明具有以下有益效果:通过获取机器人在隧洞中的相对位姿信息,进一步得到位移偏差信息,再根据位移偏差信息控制机器人沿隧洞中心线行驶,从而实现机器人在隧洞中的自动驾驶,提高机器人的行驶效率。
技术特征:
1.一种核电隧洞清理机器人自动驾驶方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的核电隧洞清理机器人自动驾驶方法,其特征在于,所述相对位姿信息包括所述机器人在隧洞中的位置和方向信息,
3.根据权利要求2所述的核电隧洞清理机器人自动驾驶方法,其特征在于,在所述步骤s12中,包括:
4.根据权利要求1所述的核电隧洞清理机器人自动驾驶方法,其特征在于,在所述步骤s1中,包括:
5.根据权利要求1所述的核电隧洞清理机器人自动驾驶方法,其特征在于,在步骤s3中,包括:
6.根据权利要求1所述的核电隧洞清理机器人自动驾驶方法,其特征在于,在步骤s3中,所述根据所述位移偏差信息控制所述机器人步骤包括:
7.根据权利要求1所述的核电隧洞清理机器人自动驾驶方法,其特征在于,所述方法还包括:
8.根据权利要求1所述的核电隧洞清理机器人自动驾驶方法,其特征在于,所述方法还包括:
9.一种核电隧洞清理机器人自动驾驶系统,其特征在于,包括:
10.一种电子设备,其特征在于,包括处理器和存储器,所述存储器用于存储计算机程序,所述处理器用于执行所述存储器的计算机程序以实现如权利要求1-8中任意一项所述的核电隧洞清理机器人自动驾驶方法。
技术总结
本发明涉及一种核电隧洞清理机器人自动驾驶方法、系统及电子设备。该方法包括以下步骤:S1、获取机器人在隧洞中的相对位姿信息;S2、根据相对位姿信息得到位移偏差信息;S3、根据位移偏差信息控制机器人,以使机器人沿隧洞中心线行驶。本发明通过获取机器人在隧洞中的相对位姿信息,进一步得到位移偏差信息,再根据位移偏差信息控制机器人沿隧洞中心线行驶,实现机器人在隧洞中的自动驾驶,从而提高机器人的行驶效率。
技术研发人员:刘帅,王国河,王华刚,袁野,张美玲,周国丰,吴凤岐,毛冰滟,吴玉,王超,殷勇
受保护的技术使用者:中广核研究院有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!