一种移动机器人开环位姿控制方法
本发明属于完整约束轮式移动机器人控制领域,具体涉及一种用于移动机器人的开环位姿控制方法。
背景技术:
1、机器人已经在工业生产、医疗电子等行业取得广泛应用。生产过程无需人工作业,有效提高了生产效率,节约了人工费和生产管理费,大幅降低成本。再者,一些作业环境对人体有害,为解放劳动力和生产力,机器人扮演着重要角色。
2、传统的移动机器人采用基于速度的控制策略,通过传感器反馈形成闭环控制系统,进行机器人位姿控制。此传统控制方式在工程实现上带来诸多不便,此外成本高。开环位姿控制则无需反馈调节,不受环境地图影响即可实现位姿控制。
技术实现思路
1、现有的移动机器人通过传感器反馈形成闭环控制系统,进行机器人位姿控制。此控制方式在工程实现上带来诸多不便,此外成本高。
2、本发明采用的技术方案是:一种移动机器人开环位姿控制方法,该方法包括:
3、将移动机器人的位姿描述为位置量(x,y)与旋转量φ;移动机器人的运动控制是按照给定的周期t,将期望的目标位姿细分为多个控制周期,在每个周期内将位姿增量转换成移动机器人移动速度;
4、单周期内车身位姿变化以坐标系形式表示如图1所示;控制算法包括移动机器人坐标系{b}与固定世界坐标系{s},移动机器人在k-1时刻位于qk-1点,对应此时刻的车身坐标系为{bk-1},对应的移动机器人即时广义速度为广义速度中括号内的三个元素分别表示k-1时刻坐标系{bk-1}下x方向的速度,k-1时刻坐标系{bk-1}下y方向的速度,k-1时刻坐标系{bk-1}下的旋转速度;位姿为位姿中括号内的三个元素分别表示k-1时刻坐标系{bk-1}下x轴坐标值,k-1时刻坐标系{bk-1}下y轴坐标值,k-1时刻坐标系{bk-1}下的旋转角度;在该周期结束后,即k时刻位于qk点,对应此时的移动机器人坐标系为{bk},对应的移动机器人即时速度为位姿为设移动机器人在一个周期内从qk-1到qk的过程为匀速运动,
5、从k-1时刻位于qk-1点的车身坐标系{bk-1}看,在从qk-1点到qk点的运动过程中,其速度是随时间变化为:
6、
7、在一个周期内对上式积分便可得到在坐标系{bk-1}下的位姿变化量,ω≠0:
8、
9、其中,t表示周期,τ表示时间常数;
10、当ω=0时,即移动机器人无旋转,只有平移,得到移动机器人位姿增量:
11、
12、由于移动机器人的开环位姿控制是根据已知的在移动机器人坐标系{b}下的期望位姿增量k-1δq=[k-1δx,k-1δy,k-1δφ]t与周期t,计算移动机器人对应的速度大小;当ω≠0时,根据公式(2)计算:
13、
14、根据公式(4)计算移动机器人在周期t时间内的所需的速度为:
15、
16、当ω=0时,直接根据公式(3)计算速度:
17、
18、公式(5)与公式(6)的计算结果为移动机器人开环位姿控制方法得到的最终的控制结果。
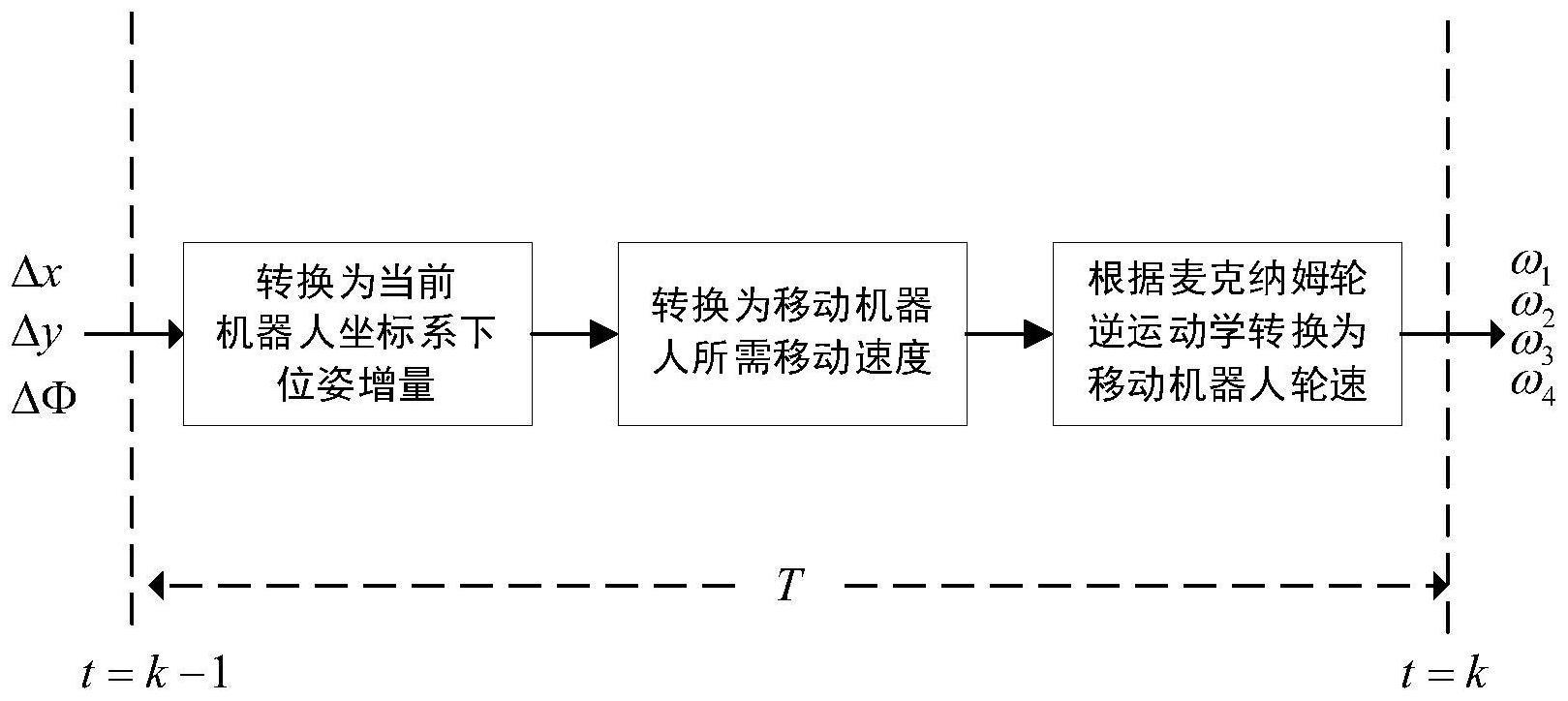
19、将上述步骤中得到的移动机器人开环位姿控制算法设计与具体的移动机器人结合,即可得到本发明移动机器人开环位姿控制方法。开环位姿控制框图如图2所示。
技术特征:
1.一种移动机器人开环位姿控制方法,该方法包括:
技术总结
本发明公开了一种移动机器人开环位姿控制方法,无需传感器反馈调节移动机器人位姿,该方法通过对期望位姿分多周期控制,在每个周期内将目标位姿增量通过开环位姿轨迹规划算法转换为移动机器人速度,再根据移动机器人建模,转换为移动机器人轮速。整个控制方法严密、精度高、适应性强。
技术研发人员:冯代伟,黄定新,黄磊,董晓磊
受保护的技术使用者:电子科技大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!