一种基于动态拓扑结构的异构多无人系统编队跟踪控制方法
本发明属于多智能体编队、异构无人系统控制领域,具体涉及一种基于动态拓扑结构的异构多无人系统编队跟踪控制方法。
背景技术:
1、多无人机系统通过单机信息交互和协同控制,相较单架无人机能够有效地提升无人机系统信息感知量、提高任务完成率、缩短任务完成时间以及抗风险能力。目前,多无人机编队系统已经得到了较为广泛的应用,如多角度检测侦察、多目标追踪打击、重物协力运输、编队飞行表演等。而未来的多无人机协同控制技术必将着眼于复杂、动态变化的环境,且不再是同类的多架无人机执行任务,可能是多架不同类型的无人机进行异构编队飞行。
2、异构多智能体编队指的是多种类型的智能体通过信息交互,资源共享、分工协同完成指定的集群任务,其在科学工程领域具有较高的应用潜力。异构多智能体系统可以分布式完成编队任务、提高执行效率;可综合每种智能体的优势,扩大集群功能范围;能够快速充分获取环境信息,进行集群系统环境感知。当前,异构多智能体系统的应用价值愈发凸显,尤其使目前陆海空天联合立体作战理念的背景下,异构多智能体系统编队具有显著优势。
3、多无人机-多无人车编队系统为典型的异构多智能体系统,其中无人机具有广阔视野、高机动性和灵活性,而无人车相较无人机具有更强的负载和续航能力,通过两者优势互补,实现空地协同倍增作业效能。目前,无人机-无人车组成的异构多无人系统编队控制研究还处在起步阶段,关于异构时变编队跟踪控制的研究也较为缺乏。
4、无人机-无人车系统时变编队跟踪过程中规避障碍物以及智能体间碰撞对提升编队安全性具有重要意义,尽管一致性算法也能够在无人车间的相对距离小于给定的编队队形时,起到无人车的分离作用,但其相应输入一般与相对位移成线性关系,避碰过程较为缓慢,难以应对无人车间的快速避碰问题。因此,如何对无人机-无人车异构系统进行一致性控制,且实现避障避碰的要求以保证编队的安全性具有重要的研究意义。
技术实现思路
1、本发明提出了一种基于动态拓扑结构的异构多无人系统编队跟踪控制方法,解决了现有技术中难以应对无人车间的快速避碰问题。
2、为实现上述目的,本发明采用以下技术方案:
3、一种基于动态拓扑结构的异构多无人系统编队跟踪控制方法,包括以下步骤:
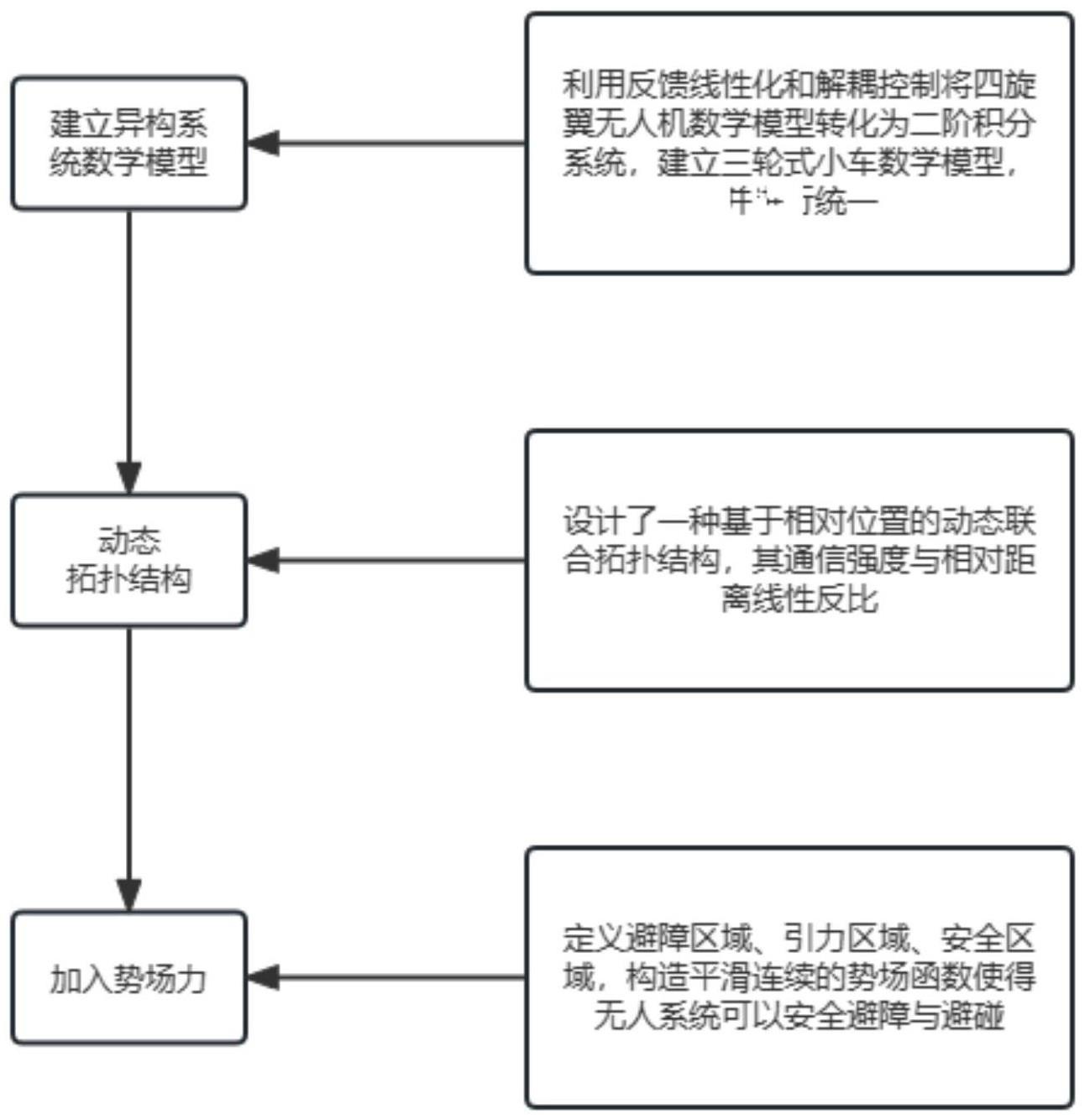
4、首先,分析四旋翼无人机、三轮式无人车的运动学与动力学模型,对无人机系统进行解耦控制,分别控制高度通道与xo y平面位置通道,从而统一异构系统数学模型;进一步基于“领导者-跟随者”模式,建立二层架构,采用分布式观测器对虚拟领导者进行状态估计,并提出一致性协议,以实现异构系统对时变轨迹进行跟踪;
5、其次,基于无人车之间通信能力受距离影响的问题,抽象出通信邻域概念,建立一种状态依赖的动态联合通信拓扑结构,在通信范围内,各智能体与邻居之间的联接强度随相对位置的变化而线性变化;
6、最后,定义无人车的安全区域、避障区域、引力区域,加入虚拟人工势场,引入σ范数,分别构造平滑连续的引力场势能场函数和斥力场势能函数,并求得每辆无人车所受到的虚拟势场力,实现无人机无人车的时变跟踪编队时,无人车子系统的避障、避碰控制。
7、有益效果:本发明提供了一种基于动态拓扑结构的异构多无人系统编队跟踪控制方法,建立无人机-无人车异构系统时变编队跟踪控制模型,针对无人系统相对位置变化对其通讯结构的影响,设计了一种基于相对位置的动态联合拓扑结构,此无人系统的模型更加贴合实际,使得此跟踪控制方法在实际应用中效果更佳稳定;面向无人系统编队的问题,提出了基于此动态结构的一致性编队控制协议;将一致性算法与人工势场法相结合,针对无人车与障碍物之间的避障问题,设计了无人车与障碍物之间的斥力场势能函数,针对无人车之间的避碰问题与相对位置过远时失去通信的问题,设计了无人车之间的势场函数,并引入σ范数以平滑势场函数,实现了编队跟踪过程中快速有效地避障避碰,仿真实验结果表明,本发明能够为无人异构系统提供完整的避碰、避障及编队策略,可有效进行避障,且避障轨迹平缓,保证了无人系统的安全和稳定。
技术特征:
1.一种基于动态拓扑结构的异构多无人系统编队跟踪控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于动态拓扑结构的异构多无人系统编队跟踪控制方法,其特征在于,步骤1中领导者状态空间方程为:
3.根据权利要求1或2所述的基于动态拓扑结构的异构多无人系统编队跟踪控制方法,其特征在于,步骤1中对每一个跟随者设计分布式虚拟领导者观测器:
4.根据权利要求3所述的基于动态拓扑结构的异构多无人系统编队跟踪控制方法,其特征在于,步骤2中无人车的通信邻域为:
5.根据权利要求4所述的基于动态拓扑结构的异构多无人系统编队跟踪控制方法,其特征在于,邻接矩阵中的元素aij被重新定义为实时依赖于状态量动态调整的wij,数学表达式如下:
6.根据权利要求4所述的基于动态拓扑结构的异构多无人系统编队跟踪控制方法,其特征在于,步骤3中无人车的安全区域:
7.根据权利要求6所述的基于动态拓扑结构的异构多无人系统编队跟踪控制方法,其特征在于,步骤3中为保证构造的势场函数光滑可导,引入σ范数,定义(σ范数)||.||σ:rn→r+定义为:
8.根据权利要求7所述的基于动态拓扑结构的异构多无人系统编队跟踪控制方法,其特征在于,步骤3中无人车与障碍物间的势场力为:
9.根据权利要求7所述的基于动态拓扑结构的异构多无人系统编队跟踪控制方法,其特征在于,步骤3中无人车间排斥力为
10.根据权利要求8或9所述的基于动态拓扑结构的异构多无人系统编队跟踪控制方法,其特征在于,无人车避障算法为:
技术总结
本发明公开了一种基于动态拓扑结构的异构多无人系统编队跟踪控制方法,属于多智能体编队、异构无人系统控制领域,具体提出一种引入虚拟人工势场的一致性编队控制方法;针对空地协同下无人机‑无人车异构系统,建立统一数学模型进行一致性控制,基于各无人车的状态向量和相对位置,建立动态拓扑通信结构,加入人工势场法,保证编队飞行过程中可进行快速避障、避碰;实验仿真结果表明本发明方法为无人异构系统提供完整的避碰、避障及编队策略,可有效进行避障,且避障轨迹平缓,保证了无人系统的安全和稳定。
技术研发人员:解明扬,高韵婉,吴凯利,屈蔷,张民
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!