一种固定翼无人机回收方法及相关设备与流程
本发明涉及无人机管理,尤其涉及一种固定翼无人机回收方法及相关设备。
背景技术:
1、相比于起飞,无人机回收是一个更为复查、也更容易出现故障的阶段,能否安全着陆已经成为评价无人机性能的一项重要指标。目前来讲,无人机的回收方式主要有伞降回收、撞网回收、起落架滑轮着陆、空中勾取回收等。但现有无人机回收方法存在回收效率低,结构复杂。回收力量不连续,冲击力大。回收动能浪费。无法快速进行复飞等问题。
技术实现思路
1、有鉴于此,本发明提供了一种固定翼无人机回收方法及相关设备,用于解决现有技术中回收效率低,结构复杂。回收力量不连续,冲击力大。回收动能浪费。无法快速进行复飞等问题。
2、为达上述之一或部分或全部目的或是其他目的,本发明提出一种固定翼无人机回收方法,包括:
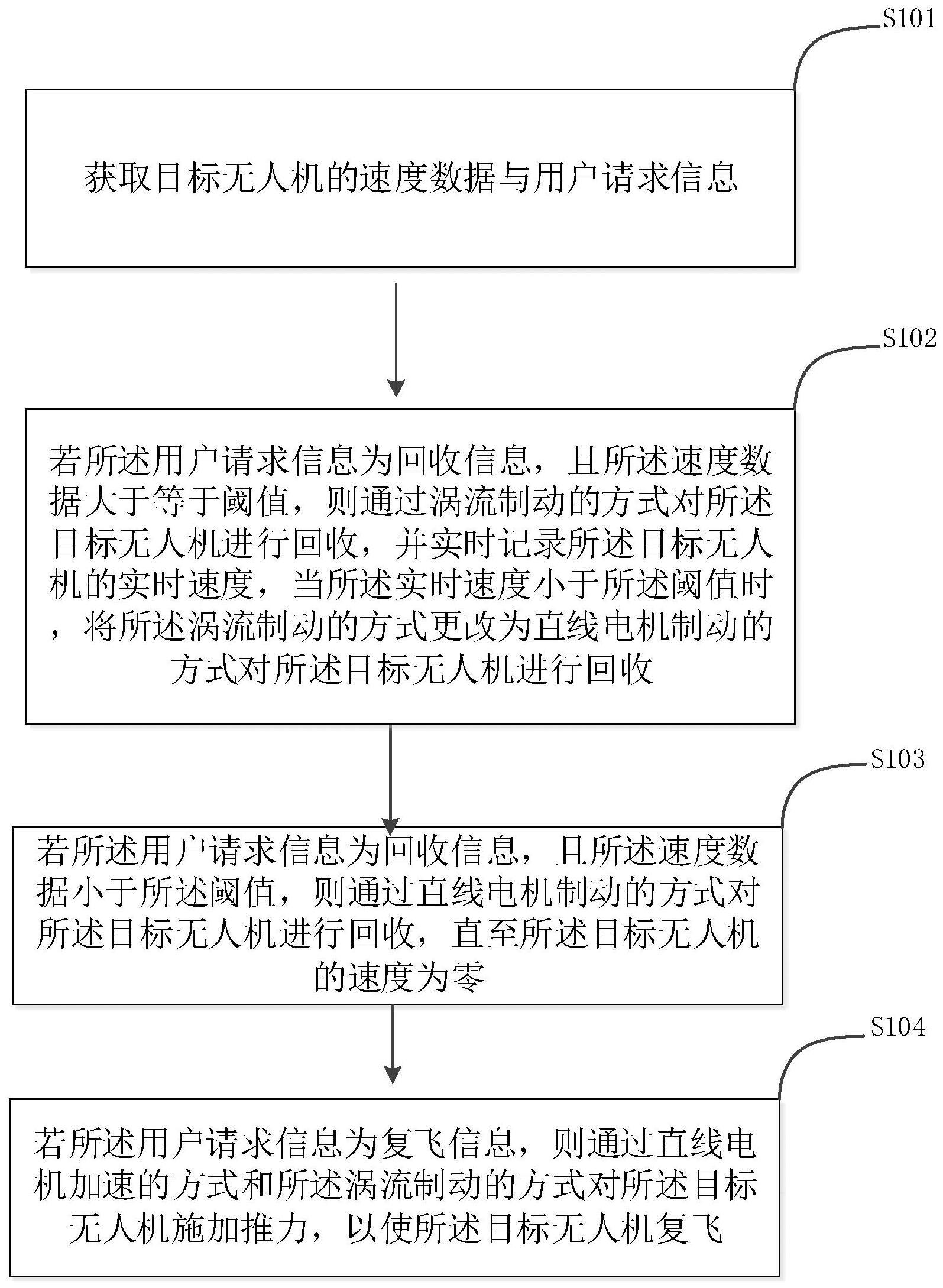
3、获取目标无人机的速度数据与用户请求信息;
4、若所述用户请求信息为回收信息,且所述速度数据大于等于阈值,则通过涡流制动的方式对所述目标无人机进行回收,并实时记录所述目标无人机的实时速度,当所述实时速度小于所述阈值时,将所述涡流制动的方式更改为直线电机制动的方式对所述目标无人机进行回收;
5、若所述用户请求信息为回收信息,且所述速度数据小于所述阈值,则通过直线电机制动的方式对所述目标无人机进行回收,直至所述目标无人机的速度为零;
6、若所述用户请求信息为复飞信息,则通过直线电机加速的方式和所述涡流制动的方式对所述目标无人机施加推力,以使所述目标无人机复飞。
7、可选的,所述获取目标无人机的速度数据的步骤,包括:
8、获取所述目标无人机的飞行图像,并将所述飞行图像进行灰度处理,得到目标灰度图;
9、采用金字塔光流算法获取第一光流速度,并根据所述第一光流速度和所述目标无人机的高度数据获取所述目标无人机的飞行速度;
10、基于所述飞行速度更新所述目标灰度图,并判断所述飞行速度是否大于第一阈值;
11、若所述飞行速度大于所述第一阈值,通过块匹配光流算法获取第二光流速度;
12、若所述飞行速度小于等于所述第一阈值,通过所述金字塔光流算法获取第二光流速度;
13、基于所述第二光流速度和所述目标无人机的高度数据获取所述目标无人机的目标飞行速度。
14、可选的,在所述通过涡流制动的方式对所述目标无人机进行回收的步骤之前,还包括:
15、获取所述目标无人机与连接器的连接信号,若所述连接信号为空,则不启动涡流制动和/或直线电机制动;
16、若所述连接信号不为空,则基于所述速度数据确定启动的目标制动方式对所述目标无人机进行回收,所述目标制动方式包括所述直线电机制动的方式和所述涡流制动的方式。
17、可选的,所述方法还包括:
18、获取所述直线电机制动的方式的启动信号;
19、根据所述启动信号生成调用指令,并基于所述调用指令控制发电机将用于直线电机制动的方式的直线电机的动能转换为电能。
20、可选的,所述若所述用户请求信息为复飞信息,则通过直线电机加速的方式和所述涡流制动的方式对所述目标无人机施加推力,以使所述目标无人机复飞的步骤,包括:
21、若所述用户请求信息为复飞信息,则获取所述目标无人机的当前速度,当所述当前速度大于等于所述阈值,则选择涡流加速的方式使所述目标无人机复飞;
22、当所述当前速度小于所述阈值,则选择直线电机加速的方式使所述目标无人机的速度达到所述阈值,再选择涡流加速的方式使所述目标无人机复飞。
23、另一方面,本申请实施例提供了一种固定翼无人机回收系统,所述系统包括:
24、涡流制动装置、固定装置、直线电机装置和控制器,其中,所述控制器用于获取目标无人机的速度数据与用户请求信息,所述涡流制动装置用于若所述用户请求信息为回收信息,且所述速度数据大于等于阈值时,通过涡流制动的方式对所述目标无人机进行回收,所述直线电机装置用于当所述实时速度小于所述阈值时,将所述涡流制动的方式更改为直线电机制动的方式对所述目标无人机进行回收,所述涡流制动装置和所述直线电机装置还用于若所述用户请求信息为复飞信息,则通过直线电机加速的方式和所述涡流制动的方式对所述目标无人机施加推力,以使所述目标无人机复飞,所述固定装置的一端用于连接所述目标无人机,所述固定装置的另一端连接所述直线电机装置中直线电机的动子。
25、可选的,所述系统还包括:发电装置,所述发电装置用于将用于直线电机制动的方式的直线电机的动能转换为电能。
26、另一方面,本申请实施例提供了一种固定翼无人机回收装置,所述装置包括:
27、数据接收模块,用于获取目标无人机的速度数据与用户请求信息;
28、回收模块,用于若所述用户请求信息为回收信息,且所述速度数据大于等于阈值,则通过涡流制动的方式对所述目标无人机进行回收,并实时记录所述目标无人机的实时速度,当所述实时速度小于所述阈值时,将所述涡流制动的方式更改为直线电机制动的方式对所述目标无人机进行回收;
29、所述回收模块,还用于若所述用户请求信息为回收信息,且所述速度数据小于所述阈值,则通过直线电机制动的方式对所述目标无人机进行回收,直至所述目标无人机的速度为零;
30、复飞模块,用于若所述用户请求信息为复飞信息,则通过直线电机加速的方式和所述涡流制动的方式对所述目标无人机施加推力,以使所述目标无人机复飞。
31、另一方面,本申请实施例提供了一种电子设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储器之间通过所述总线通信,所述机器可读指令被所述处理器执行时执行如上述的固定翼无人机回收方法的步骤。
32、另一方面,本申请实施例提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器运行时执行如上所述的固定翼无人机回收方法的步骤。
33、实施本发明实施例,将具有如下有益效果:
34、通过获取目标无人机的速度数据与用户请求信息;若所述用户请求信息为回收信息,且所述速度数据大于等于阈值,则通过涡流制动的方式对所述目标无人机进行回收,并实时记录所述目标无人机的实时速度,当所述实时速度小于所述阈值时,将所述涡流制动的方式更改为直线电机制动的方式对所述目标无人机进行回收;若所述用户请求信息为回收信息,且所述速度数据小于所述阈值,则通过直线电机制动的方式对所述目标无人机进行回收,直至所述目标无人机的速度为零;若所述用户请求信息为复飞信息,则通过直线电机加速的方式和所述涡流制动的方式对所述目标无人机施加推力,以使所述目标无人机复飞。进而使得回收效率高,制动力连续,冲击小,可实现能量回收的优点。
技术特征:
1.一种固定翼无人机回收方法,其特征在于,包括:
2.如权利要求1所述的固定翼无人机回收方法,其特征在于,所述获取目标无人机的速度数据的步骤,包括:
3.如权利要求1所述的固定翼无人机回收方法,其特征在于,在所述通过涡流制动的方式对所述目标无人机进行回收的步骤之前,还包括:
4.如权利要求1所述的固定翼无人机回收方法,其特征在于,所述方法还包括:
5.如权利要求1所述的固定翼无人机回收方法,其特征在于,所述若所述用户请求信息为复飞信息,则通过直线电机加速的方式和所述涡流制动的方式对所述目标无人机施加推力,以使所述目标无人机复飞的步骤,包括:
6.一种固定翼无人机回收系统,其特征在于,所述系统包括:
7.如权利要求6所述的固定翼无人机回收系统,其特征在于,所述系统还包括:发电装置,所述发电装置用于将用于直线电机制动的方式的直线电机的动能转换为电能。
8.一种固定翼无人机回收装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储器之间通过所述总线通信,所述机器可读指令被所述处理器执行时执行如权利要求1至5中任一项所述的固定翼无人机回收方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器运行时执行如权利要求1至5中任一项所述的固定翼无人机回收方法的步骤。
技术总结
本发明实施例公开了一种固定翼无人机回收方法及相关设备,所述方法包括:获取目标无人机的速度数据与用户请求信息;若所述用户请求信息为回收信息,且所述速度数据大于等于阈值,则通过涡流制动的方式对所述目标无人机进行回收,并实时记录所述目标无人机的实时速度,当所述实时速度小于所述阈值时,将所述涡流制动的方式更改为直线电机制动的方式对所述目标无人机进行回收;若所述用户请求信息为回收信息,且所述速度数据小于所述阈值,则通过直线电机制动的方式对所述目标无人机进行回收,直至所述目标无人机的速度为零;若所述用户请求信息为复飞信息,则通过直线电机加速的方式对所述目标无人机施加推力,以使所述目标无人机复飞。
技术研发人员:彭驰宇,王宁
受保护的技术使用者:湖南天涛科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!