一种基于极点重构的永磁同步电机模拟器电流控制策略
本发明属于永磁同步电机硬件在环测试,具体涉及一种基于极点重构的永磁同步电机模拟器电流控制策略。
背景技术:
1、针对车用驱动电机采用功率硬件在环(power hardware-in-the-loop,phil)的电机模拟器(electric motor emulator,eme)进行测试,是现阶段较好的解决方案。在测试中通过电力电子器件和控制算法模拟真实的电机端口电流、电压特性,并通过软件改变负载需求和故障注入,相比传统的电机机械负载台架测试方式可显著提高电机控制单元的测试效率,缩短电机控制器开发周期以及降低研发成本。电机模拟器在工作中,其电流控制策略是保证电机电压电流端口特性模拟精度的核心环节,决定了电机模拟器电流环的响应速度和稳态精度。然而,现有基于pi控制的策略存在低通滤波特性,使得电机模拟器的模拟带宽受限,只适用于中低速电机模拟器;开环控制虽然能够避免电流环控制冲突,但存在鲁棒性差、易受参数扰动的影响,并且其微分计算会引入一定的高频噪声,模拟精度不够高;部分现有技术中虽基于连续域数学模型进行设计,并经过离散化处理再应用于数字控制系统,但由于数字控制系统的控制延时等因素,基于连续系统设计的控制策略应用于数字系统后,控制性能会发生改变。因此,如何提供新的永磁同步电机模拟器电流控制策略,在克服上述现有技术不足的同时提供更好的控制效果,是本领域中迫切需要解决的技术问题。
技术实现思路
1、有鉴于此,针对本领域中存在的技术问题,本发明提供了一种基于极点重构的永磁同步电机模拟器电流控制策略,具体包括以下步骤:
2、步骤一、对永磁同步电机模拟器接口电路建立dq坐标系下的连续复矢量传递函数;
3、步骤二、将永磁同步电机模拟器侧的三相逆变器等效为零阶保持器,以及考虑数字控制器的延迟环节,分别建立相应的连续复矢量传递函数,并结合步骤一中建立的连续复矢量传递函数执行离散化处理,得到接口电路的离散复矢量传递函数;
4、步骤三、对接口电路离散复矢量传递函数的极点进行重构设计,将复数极点转化为两个实数极点,使dq轴之间实现完全解耦;
5、步骤四、针对极点重构后的接口电路离散复矢量传递函数,基于所需的控制效果来设计离散电流控制策略以及相应的控制器参数。
6、进一步地,步骤一中连续复矢量传递函数的具体建立过程包括:
7、首先对l型接口电路建立三相坐标系下的电压方程,并经过clark坐标变换后得到两相静止坐标系下的以下电压方程:
8、
9、式中,分别表示静止坐标系下的电机驱动单元侧电压、电机模拟器侧电压以及接口电路电流的复数矢量,满足rf为接口电路相电阻实际值;lf为接口电路相电感实际值;
10、对上式进行复矢量park变换得到以下同步旋转坐标系下的复矢量电压方程:
11、
12、式中,表示永磁同步电机模拟器侧电压复矢量;表示电机驱动单元侧输出的电压复矢量;表示接口电路电流复矢量;ωe为电角速度;
13、由以上复矢量电压方程得到以下连续复矢量传递函数:
14、
15、进一步地,步骤二中针对延迟环节和零阶保持器首先在连续域分别描述为gd(s)=e-st,gzoh(s)=(1-e-st)/s,并相应地在复域中对拉普拉斯算子进行代换s→s+jωe,得到延迟环节和零阶保持器的连续复矢量传递函数分别为:
16、
17、
18、两者构成的连续复矢量传递函数转换为离散复矢量传递函数:
19、
20、式中,t为离散步长。
21、进一步地,步骤三中进行极点重构时首先将接口电路的离散复矢量传递函数表示为以下形式:
22、
23、选取式中的系数k1~k3分别为k1=α1+α2、k2=α1α2、k2=b-1,其中,α1和α2为待定实系数也即重构的极点,可得到极点重构后的离散复矢量传递函数为:
24、
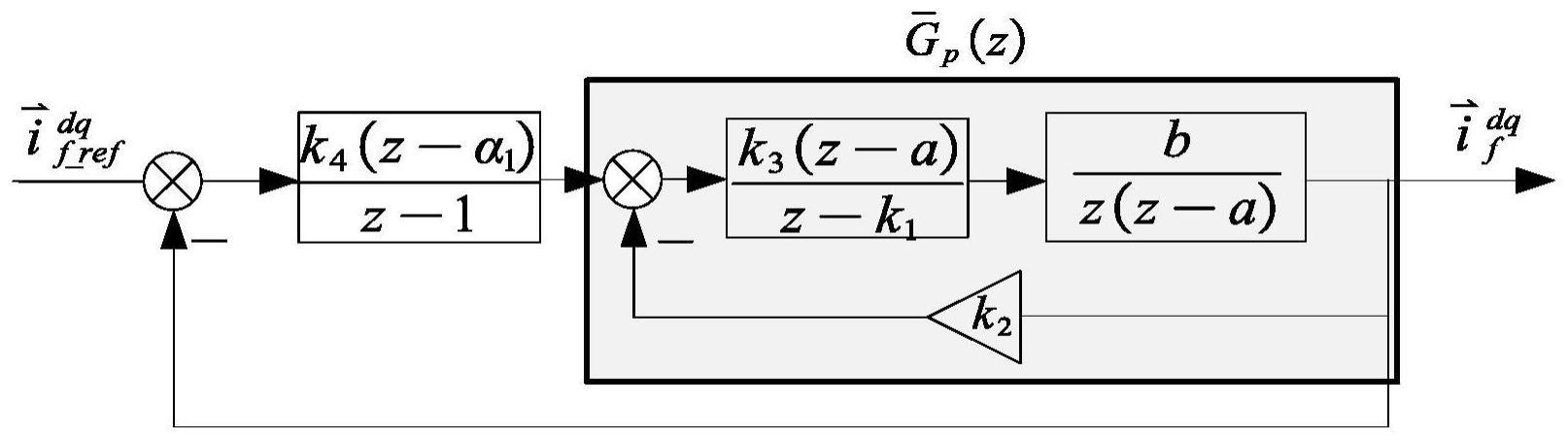
25、进一步地,步骤四中针对上述极点重构后的离散复矢量传递函数,设计以下控制器离散复矢量传递函数:
26、
27、式中,k4为待定系数,α1同上为重构的极点;
28、则可将控制闭环传递函数确定为:
29、
30、在实际控制中具体通过不同k4和α2选取来得到所需的控制性能。
31、进一步地,针对无差拍控制的需要,选取k4=1和α2=-1来实现。
32、上述本发明所提供的基于极点重构的永磁同步电机模拟器电流控制策略,其利用复矢量进行建模分析,将常规的接口电路的d、q轴两个电压方程简化为一个复矢量电压方程模型;在建模中考虑了系统的延迟环节,使得到的离散复矢量模型更加符合实际数字控制需要;通过极点重构后得到的控制策略具有参数选取灵活、鲁棒性好、没有稳态误差等优点,并可通过参数配置实现所需的控制效果,尤其是可以实现无静差的无差拍控制,克服了传统的无差拍电流预测控制在参数扰动情况下存在稳态误差的问题,同时扩展了传统无差拍电流预测控制的参数失配稳定范围。
技术特征:
1.一种基于极点重构的永磁同步电机模拟器电流控制策略,其特征在于:具体包括以下步骤:
2.如权利要求1所述的永磁同步电机模拟器电流控制策略,其特征在于:步骤一中连续复矢量传递函数的具体建立过程包括:
3.如权利要求2所述的永磁同步电机模拟器电流控制策略,其特征在于:步骤二中针对延迟环节和零阶保持器首先在连续域分别描述为gd(s)=e-st,gzoh(s)=(1-e-st)/s并相应地在复域中对拉普拉斯算子进行代换s→s+jωe,得到延迟环节和零阶保持器的连续复矢量传递函数分别为:
4.如权利要求3所述的永磁同步电机模拟器电流控制策略,其特征在于:步骤三中进行极点重构时首先将接口电路的离散复矢量传递函数表示为以下形式:
5.如权利要求4所述的永磁同步电机模拟器电流控制策略,其特征在于:步骤四中针对上述极点重构后的离散复矢量传递函数,设计以下控制器离散复矢量传递函数:
6.如权利要求5所述的永磁同步电机模拟器电流控制策略,其特征在于:针对无差拍控制的需要,选取k4=1和α2=-1来实现。
技术总结
本发明提供了一种基于极点重构的永磁同步电机模拟器电流控制策略,其利用复矢量进行建模分析,将常规的接口电路的d、q轴两个电压方程简化为一个复矢量电压方程模型;在建模中考虑了系统的延迟环节,使得到的离散复矢量模型更加符合实际数字控制需要;通过极点重构后得到的控制策略具有参数选取灵活、鲁棒性好、没有稳态误差等优点,并可通过参数配置实现所需的控制效果,尤其是可以实现无静差的无差拍控制,克服了传统的无差拍电流预测控制在参数扰动情况下存在稳态误差的问题,同时扩展了传统无差拍电流预测控制的参数失配稳定范围。
技术研发人员:王志福,王泽尚,潘琼
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!