一种基于模糊软切换的电液伺服系统自抗扰控制方法
本发明涉及智能控制领域,具体设计了一种基于模糊软切换的电液伺服系统自抗扰控制方法。
背景技术:
1、电液伺服系统作为控制领域的重要组成部分,进一步地探究其控制策略具有极其重要的实际意义。根据液压系统工作原理可知,阀控缸电液伺服系统可以等效为一个具有非线性和时变性的强耦合系统,存在建模困难、控制冗杂等问题。传统的pid控制通过调整比例、积分、微分系数来获取期望的输出,在面对非线性系统时,很难适应各种实际工况,存在滞后、超调和极限环振荡等缺陷,不能满足高精度和强鲁棒性的伺服系统。
2、为了解决这一问题,自抗扰控制(active disturbance rejection control,adrc)在面对非线性系统时取得良好的控制效果,然而adrc涉及非线性函数,参数整定相对复杂,易引起小误差的连续振荡等问题,对实际工程应用带来极大的不便。为提高液压伺服系统的普适性,线性自抗扰控制器(linearactive disturbance rejection controller,ladrc)被广泛研究与应用,能够快速响应动态过程,很好的应对电液位置伺服系统存在的参数不确定和阀流量增益非线性等问题,但是面对非线性、参数时变系统,adrc比ladrc拥有更高的效率,且对初始误差相对不敏感。
3、所以有必要结合两者优势,参照液压系统本身特性进一步优化自抗扰控制策略,为其在实际工程应用中提供新思路、新方法。考虑到扰动幅值等存在变动,若只利用单纯的切换线性和非线性自抗扰控制器,控制量存在突变问题,系统控制效果并不能达到最优,故而亟待进行控制器的创新。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种基于模糊软切换的电液伺服系统自抗扰控制方法,通过该控制方法对电液伺服系统进行控制,在跟踪控制上具有较高的鲁棒性和抗干扰能力,有效地提高了伺服系统的稳定性和跟踪精度,实现了伺服系统的精确控制。
2、本发明采用如下技术方案:
3、一种基于模糊软切换的电液伺服系统自抗扰控制方法,包括下列步骤:
4、步骤1:依据电液伺服系统数学模型,建立自抗扰控制方法,包括线性自抗扰控制部分、非线性自抗扰控制部分;
5、步骤2:根据自抗扰控制方法构建模糊软切换策略,依据状态误差区域和干扰区域进行自主切换;
6、步骤3:为了验证基于模糊软切换的电液伺服系统自抗扰控制方法的优越性,进行实验验证。
7、进一步地,在步骤2中,根据自抗扰控制方法构建模糊软切换策略,具体为:
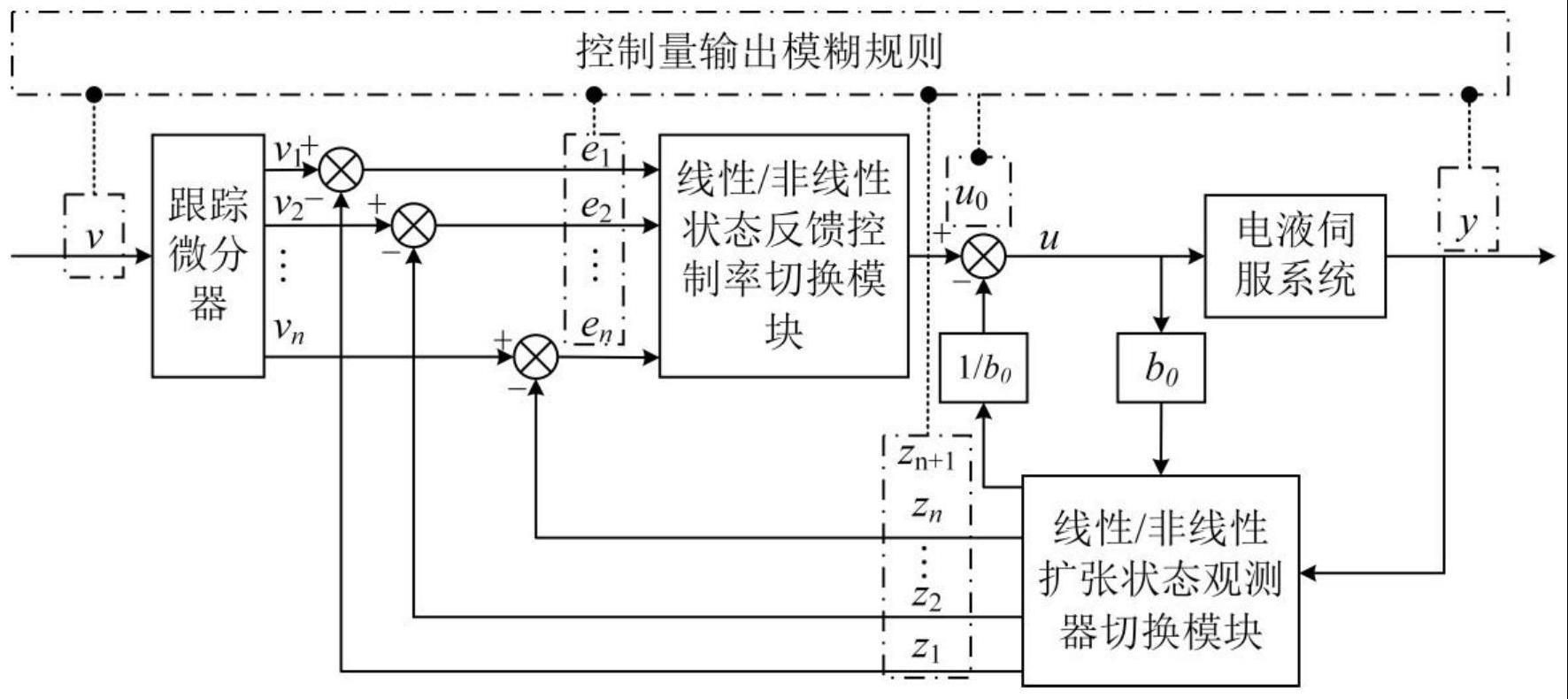
8、电液伺服系统位置环控制由非线性自抗扰控制和线性自抗扰控制两部分组成,综合考虑稳态观测误差和非线性扰动因素,面对较小的稳态观测误差,采用非线性自抗扰控制提高跟踪精度和响应速度,伺服系统初始运行阶段采用线性自抗扰控制改善伺服阀的中位性能,根据运行时间和观测信息进行控制器切换,选取线性自抗扰控制应对较大的稳态观测误差,确保控制器的控制精度和抗干扰性能。
9、进一步地,在步骤2中,依据状态误差区域和干扰区域进行自主切换,具体为:
10、基于上述主体控制思路引入模糊软切换策略,实际运行时根据输入变量的情况在两者之间自主切换,削弱了切换过程中的抖动与跳变,可以实现线性与非线性自抗扰控制间的平滑切换,确定其具体的模糊规则和软切换形式如下:
11、控制量输出模糊规则
12、
13、式中,|e(k)|为系统状态误差,|e|为观测位置响应误差,|zn+1|为观测估计的总扰动,语言变量s、m和b分别表示“小”,“中”,“大”,和分别为线性自抗扰控制和非线性自抗扰控制的控制权重。
14、依据伺服系统状态误差、观测位置响应误差和总扰动作为输入量,依据模糊规则确定线性和非线性自抗扰控制权重占比,结合稳态观测误差和非线性扰动因素,进而得到实际的控制量输出值:
15、
16、式中:δ1和δ2分别为过渡过程的上下限,分为观测位移误差区域[e1,e2]与观测扰动量区域[m1,m2],μl和μn分别为依据模糊规则确定的控制权重占比。
17、控制器软切换形式
18、基于上述主体思想,进一步地确定扩张状态观测器切换条件为:伺服系统运行时间t<t或观测估计的总扰动|zn+1(t)|>m或观测位置响应误差|e|>1,若上述条件满足其一,则切换至线性状态观测器,反之则切换至非线性状态观测器。同理,为了充分利用线性状态误差观测律的优势,确立切换条件为:伺服系统运行时间t<t或观测位置响应误差|e|>1或观测估计误差|vi-zi|>1,i=1,2,…,n,若上述条件满足其一,则切换为线性状态误差观测律,反之,如果上述条件均不满足,则切换至非线性状态误差观测律。
19、进一步地,在步骤3中,验证基于模糊软切换的电液伺服系统自抗扰控制方法的优越性,进行实验验证,具体为:
20、将所述的基于模糊软切换的自抗扰控制方法应用于电液伺服系统,依据无扰动、小扰动和大扰动实验情况进行实验验证,综合测试电液伺服系统的抗干扰性能和位置跟踪精度。
21、本发明的有益效果是:
22、(1)本发明给出了一种基于模糊软切换的电液伺服系统自抗扰控制方法,并成功应用于某类电液伺服系统上,面对不同工况条件仍能保持高精度和高响应速度,有效缓解了换向阶段的大幅抖振现象,在面对未知扰动时具有良好的动态性能;
23、(2)模糊软切换策略的引入,保证了控制量的平稳性,依据状态误差区域和干扰区域进行自主切换,平滑了线性与非线性自抗扰控制器的过渡,规避了线性和非线性自抗扰控制器的缺点,可以有效地补偿各种干扰,实现大误差快速响应和小误差大增益的非线性特性。
技术特征:
1.一种基于模糊软切换的电液伺服系统自抗扰控制方法,其特征在于,包括下列步骤:
技术总结
本发明公开了一种基于模糊软切换的电液伺服系统自抗扰控制方法,属于智能控制领域。该方法首先依据电液伺服系统数学模型,建立自抗扰控制方法,包括线性自抗扰控制部分、非线性自抗扰控制部分;根据自抗扰控制方法构建模糊软切换策略,依据状态误差区域和干扰区域进行自主切换;为了验证基于模糊软切换的电液伺服系统自抗扰控制方法的优越性,进行实验验证;面对电液伺服系统不同状态下的实际工况,有限避免控制器切换带来的振颤与冲击,在扰动干扰方面具有较好的系统鲁棒性和定位精度。本发明实现了电液伺服系统高精度控制,解决了控制器切换的输出抖振现象,保证了系统的稳定性和有限时间收敛。
技术研发人员:高炳微,申伟,张威,郑麟韬,赵宏建
受保护的技术使用者:哈尔滨理工大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!