在线决策的无人机搜索规划方法、装置、电子设备及介质
本发明涉及无人机领域,具体涉及一种在线决策的无人机搜索规划方法、装置、电子设备及介质。
背景技术:
1、随着无人驾驶技术的快速发展,且由于无人机在机动性、移动性和灵活性方面的优势,无人机已广泛应用于信息搜索,环境监测,边境侦察,物资运送等领域。一般来说,无人机的操作包括路径规划和搜索决策两个方面,其直接影响无人机操作执行的效率。
2、无人机搜索规划是信息采集的一个重要方式,且由于无人机应用比传统的载人驾驶飞机方法更具有优越性,使得无人机在线规划成为一个备受关注的问题。近年来的研究致力于解决无人机搜索规划问题中兼顾路径规划和搜索过程的联合优化挑战。
3、传统的方法遵循离线的两阶段范式,依次考虑路径选择和搜索时间分配,在行动前做出所有的决定。在第一阶段仅采用贪婪搜索,蚁群优化(aco)等方法单独解决路径规划问题,不考虑每个搜索点的搜索收益和成本等信息。第二阶段是关注时间或成本的分配,考虑搜索某一特定点的难度和潜在价值。为了解决这个问题,人们提出了一系列方法,包括基于信息收益显著性的快速评分法,基于部分可观察的分散马尔可夫过程的启发式方法,和基于牛顿法的时间分配方法。
4、上述的方法都有一个前提,即在做决策前需要知道搜索收益和成本的先验参数。然而,在无人机搜索的实际操作中,其要搜索的环境往往是未知的,也就是说搜索收益和成本通常是在线获知的,而不是在行动前已知。而现在大部分无人机规划方法均针对全局已知环境或局部已知环境,并离线预先规划搜索航迹,在面对未知环境时,这些方法的搜索效率就会降低,同时缺乏动态应变能力。
技术实现思路
1、有鉴于此,本公开实施例提供一种在线决策的无人机搜索规划方法、装置、电子设备及介质,至少部分解决现有技术中存在的问题。
2、第一方面,本公开实施例提供了一种在线决策的无人机搜索规划方法,其包括:
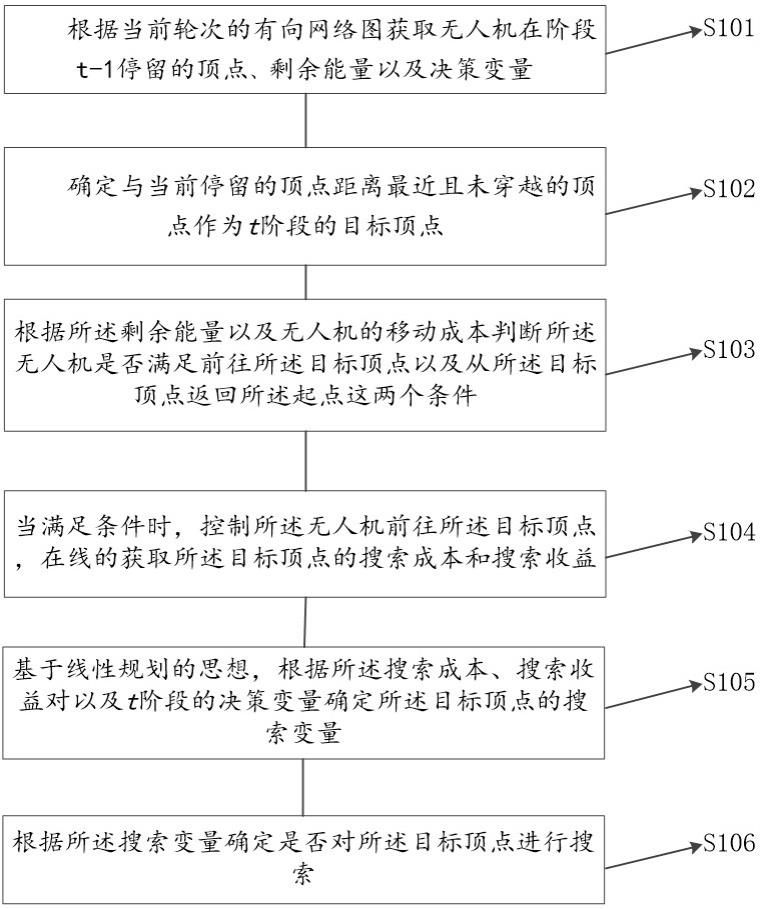
3、根据当前轮次的有向网络图获取无人机在 t-1阶段停留的顶点、剩余能量以及决策变量,其中,所述有向网络图根据待搜索的未知环境生成,其包括一组顶点集以及连接任意两个顶点的一组边集,所述顶点集包括起点,所述边集中每条边的长度已知;
4、确定与当前停留的顶点距离最近且未穿越的顶点作为 t阶段的目标顶点;
5、根据所述剩余能量以及无人机的移动成本判断所述无人机是否满足前往所述目标顶点以及从所述目标顶点返回所述起点这两个条件;
6、当满足条件时,控制所述无人机前往所述目标顶点,在线的获取所述目标顶点的搜索成本和搜索收益;
7、根据所述搜索成本、搜索收益对以及 t阶段的决策变量确定所述目标顶点的搜索变量;
8、根据所述搜索变量确定是否对所述目标顶点进行搜索。
9、根据本公开实施例的一种具体实现方式,所述决策变量初始为0。
10、根据本公开实施例的一种具体实现方式,还包括:
11、当不满足条件时,控制所述无人机返回起点,并根据当前轮次经历过的顶点更新所述有向网络图。
12、根据本公开实施例的一种具体实现方式, t阶段的搜索变量通过如下公式计算得到:
13、
14、其中,为所述目标顶点的搜索成本,为目标顶点的搜索收益,为所述决策变量;当时,所述无人机执行对所述目标顶点的搜索,当时,所述无人机不执行对所述目标顶点的搜索。
15、根据本公开实施例的一种具体实现方式,在根据所述搜索变量确定是否对所述目标顶点进行搜索之后,还包括:
16、根据所述搜索变量、预设的学习率、搜索收益、无人机总能量以及移动成本更新得到 t+1阶段的决策变量。
17、根据本公开实施例的一种具体实现方式,更新后的在 t+1阶段的决策变量的表达式:
18、 ;
19、其中,, b为无人机的总能量,表示从停留位置到的遍历能量,为学习率。
20、根据本公开实施例的一种具体实现方式,所述学习率,其中, n为顶点集中的顶点个数。
21、第二方面,本公开实施例提供了一种在线决策的无人机搜索规划装置,其包括:
22、状态获取单元,用于根据当前轮次的有向网络图获取无人机在 t-1阶段停留的顶点、剩余能量以及决策变量,其中,所述有向网络图根据搜索环境生成,其包括一组顶点集以及连接任意两个顶点的一组边集,所述顶点集包括起点,所述边集中每条边的长度已知;
23、目标顶点决策单元,用于确定与当前停留的顶点距离最近且未穿越的顶点作为 t阶段的目标顶点;
24、移动判断单元,用于根据所述剩余能量以及无人机的移动成本判断所述无人机是否满足前往所述目标顶点以及从所述目标顶点返回所述起点;
25、在线获取单元,用于若满足,则控制所述无人机前往所述目标顶点,并在线的获取所述目标顶点的搜索成本和搜索收益;
26、搜索变量计算单元,用于根据所述搜索成本、搜索收益对以及所述决策变量确定所述目标顶点的搜索变量;
27、搜索判断单元,用于搜索根据所述搜索变量确定是否对所述目标顶点进行搜索。
28、第三方面,本公开实施例提供了一种电子设备,该电子设备包括:
29、至少一个处理器;以及,
30、与该至少一个处理器通信连接的存储器;其中,
31、该存储器存储有可被该至少一个处理器执行的指令,该指令被该至少一个处理器执行,以使该至少一个处理器能够执行上述的在线决策的无人机搜索规划方法。
32、第四方面,本公开实施例提供了一种非暂态计算机可读存储介质,该非暂态计算机可读存储介质存储计算机指令,该计算机指令用于使该计算机执行上述的在线决策的无人机搜索规划方法。
33、综上所述,本实施例中,为了应对未知搜索环境的挑战,将路径规划和搜索决策以一种综合的在线方式进行,通过在线的方式确定无人机前往的顶点以及前往的顶点的搜索成本和搜索收益,再以线性规划的思想对该顶点是否搜索做出决策,从而实现了在有限的无人机总能量下,以最佳方式减少无人机在路径上的能量消耗,并使累积的搜索收益尽可能高。
技术特征:
1.一种在线决策的无人机搜索规划方法,其特征在于,包括:
2.根据权利要求1所述的在线决策的无人机搜索规划方法,其特征在于,所述决策变量初始为0。
3.根据权利要求1所述的在线决策的无人机搜索规划方法,其特征在于,还包括:
4.根据权利要求1所述的在线决策的无人机搜索规划方法,其特征在于,
5.根据权利要求4所述的在线决策的无人机搜索规划方法,其特征在于,在根据所述搜索变量确定是否对所述目标顶点进行搜索之后,还包括:
6.根据权利要求5所述的在线决策的无人机搜索规划方法,其特征在于,更新后的在t+1阶段的决策变量的表达式为:
7.根据权利要求6所述的在线决策的无人机搜索规划方法,其特征在于,所述学习率,其中,n为顶点集中的顶点个数。
8.一种在线决策的无人机搜索规划装置,其特征在于,包括:
9.一种电子设备,其特征在于,该电子设备包括:
10.一种非暂态计算机可读存储介质,其特征在于,该非暂态计算机可读存储介质存储计算机指令,该计算机指令用于使该计算机执行权利要求1至7任意一项所述的在线决策的无人机搜索规划方法。
技术总结
本公开实施例提供了一种在线决策的无人机搜索规划方法、装置、电子设备及介质,方法包括:根据有向网络图获取无人机在t‑1阶段停留的顶点、剩余能量及决策变量;确定与顶点距离最近且未穿越的顶点作为t阶段的目标顶点;根据剩余能量以及移动成本判断无人机是否满足前往目标顶点以及从目标顶点返回起点这两个条件;当满足条件时,控制所述无人机前往所述目标顶点,在线的获取所述目标顶点的搜索成本和搜索收益;根据所述搜索成本、搜索收益对以及t阶段的决策变量确定所述目标顶点的搜索变量,并确定是否对所述目标顶点进行搜索。本实施例实现了在有限的无人机总能量下,以最佳方式减少无人机在路径上的能量消耗,并使累积的搜索收益尽可能高。
技术研发人员:肖开明,段浩鹏,刘丽华,王懋,杨晧宇,李璇,黄宏斌
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!