无人集卡调度方法、系统及存储介质与流程
本发明涉及无人运载工具领域,尤其涉及一种无人集卡调度方法、系统及存储介质。
背景技术:
1、无人集卡是一种自主驾驶的物流车辆,它使用先进的传感器和导航技术,能够识别环境并规划路径,完成货物装载、运输和卸载的过程。无人集卡不仅可以提高物流效率,减少人力成本,还能有效地减少交通事故的发生。它可以在仓库、码头、工厂等物流场景中广泛应用,为现代物流行业带来了新的变革。同时,在应对人口老龄化和劳动力短缺等社会问题方面,无人集卡也具有重要的意义。
2、然而无人集卡在港口进行转运集装箱作业时,岸桥装卸箱地点无法确定,需要实时确定岸桥位置并寻找岸桥处停车点,需要动态规划精准停车点,并完成装卸。因此,实时确定岸桥位置并动态地精准调度是亟需解决的问题。
3、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供了一种无人集卡调度方法、系统及存储介质,旨在解决现有技术中无法实现实时确定岸桥位置并动态地精准调度的技术问题。
2、为实现上述目的,本发明提供了一种无人集卡调度方法,所述方法包括以下步骤:
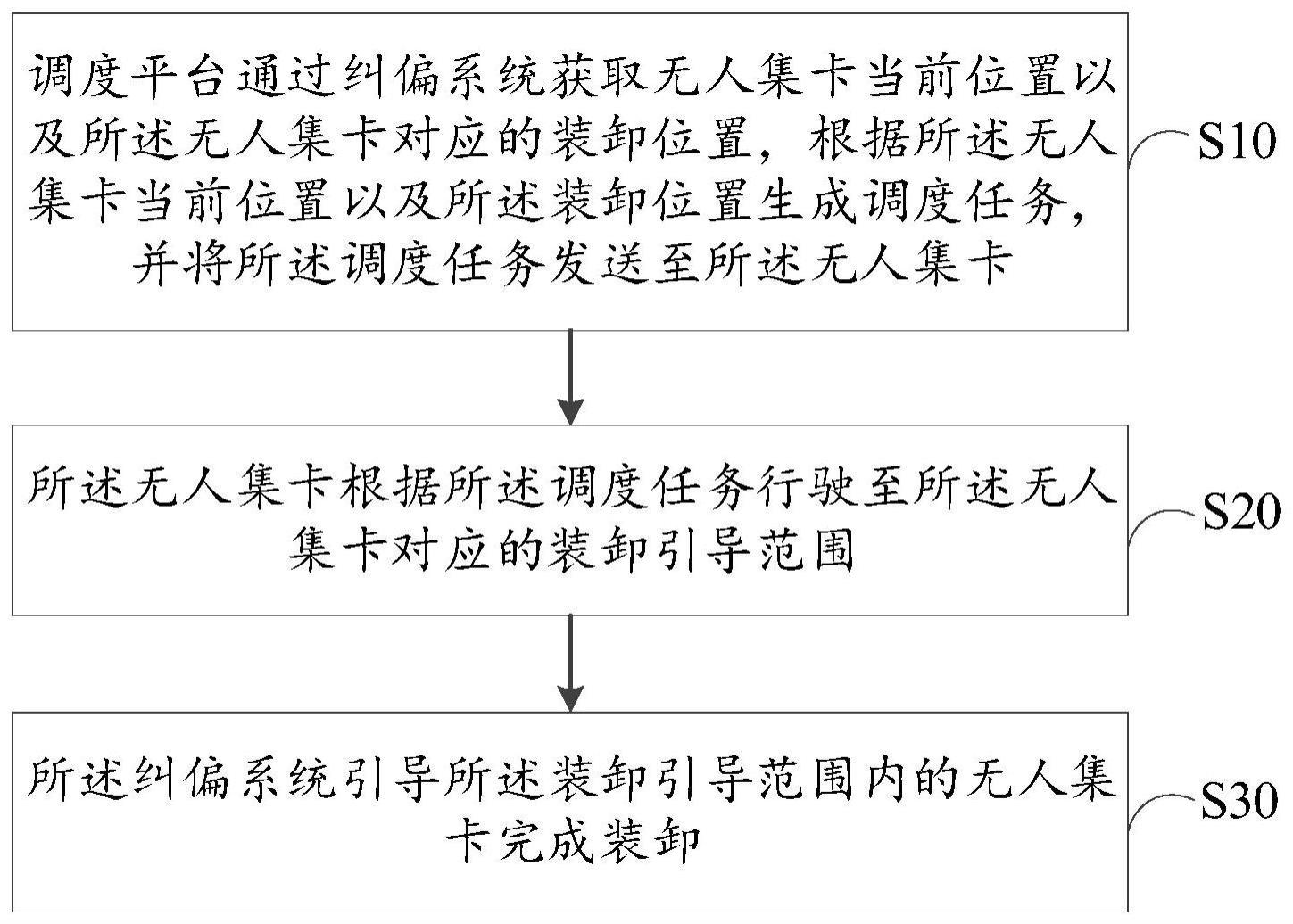
3、调度平台通过纠偏系统获取无人集卡当前位置以及所述无人集卡对应的装卸位置,根据所述无人集卡当前位置以及所述装卸位置生成调度任务,并将所述调度任务发送至所述无人集卡;
4、所述无人集卡根据所述调度任务行驶至所述无人集卡对应的装卸引导范围;
5、所述纠偏系统引导所述装卸引导范围内的无人集卡完成装卸。
6、可选地,所述纠偏系统引导所述装卸引导范围内的无人集卡完成装卸的步骤,包括:
7、所述纠偏设备识别所述装卸引导范围内的无人集卡的规格;
8、在识别到所述无人集卡为双小箱规格时,通过设置在所述无人集卡固定位置上的纠偏辅助装置获取前箱中心点位以及后箱中心点位,并将所述前箱中心点位以及后箱中心点位发送至纠偏设备;
9、所述纠偏设备将所述无人集卡的前箱中心点位以及后箱中心点位分别调整至装卸位置,完成装卸。
10、可选地,所述纠偏设备将所述无人集卡的前箱中心点位以及后箱中心点位分别调整至装卸位置,完成装卸的步骤,包括:
11、所述纠偏设备对无人集卡进行实时扫描;
12、根据实时扫描结果对所述无人集卡进行实时引导;
13、直至所述无人集卡的前箱中心点位与装卸位置的纵向误差不超过预设范围时,完成前箱装卸任务;
14、在完成所述前箱装卸任务后,识别后箱是否为空箱;
15、若否,所述纠偏设备引导所述无人集卡的后箱中心点位至与装卸位置的纵向误差低于预设范围时,完成所述后箱的装卸任务。
16、可选地,所述调度平台通过纠偏系统获取无人集卡当前位置以及所述无人集卡对应的装卸位置的步骤,包括:
17、调度平台通过纠偏设备确定无人集卡在对应车道的相对位置,通过对应车道信息以及所述相对位置确定所述无人集卡当前位置;
18、所述调度平台判断所述无人集卡对应的装卸位置是否处于岸桥区域;
19、若是,所述调度平台通过设置在岸桥区域内固定位置的纠偏辅助装置获得装卸区域对应吊具的移动区域,根据所述移动区域确定所述无人集卡对应的装卸位置。
20、可选地,所述调度平台判断所述无人集卡对应的装卸位置是否处于岸桥区域的步骤之后,还包括:
21、若否,所述调度平台检测所述无人集卡对应的装卸位置所属的堆场信息;
22、所述调度平台根据所述堆场信息确定所述无人集卡对应的装卸位置。
23、可选地,所述根据所述无人集卡当前位置以及所述装卸位置生成调度任务的步骤,包括:
24、所述调度平台根据所述无人集卡当前位置以及所述装卸位置,通过路径优化算法,确定装箱路径、卸箱路径以及装卸规划;
25、通过所述装箱路径、所述卸箱路径以及所述装卸规划生成调度任务。
26、可选地,所述无人集卡调度方法还包括:
27、所述调度平台监测当前高精定位是否到达最低定位标准;
28、若是,所述调度平台首先通过高精定位进行模糊定位,再通过纠偏系统获取无人集卡当前位置以及所述无人集卡对应的装卸位置。
29、可选地,所述无人集卡调度方法还包括:
30、所述无人集卡进入装卸引导范围后,自动触发纠偏调整,以使所述纠偏系统引导所述装卸引导范围内的无人集卡完成装卸。
31、此外,为实现上述目的,本发明还提出一种无人集卡调度系统,所述无人集卡调度系统包括:调度平台、纠偏系统和无人集卡,所述系统还包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的无人集卡调度程序,所述无人集卡调度程序配置为实现如上文所述的无人集卡调度方法的步骤。
32、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有无人集卡调度程序,所述无人集卡调度程序被处理器执行时实现如上文所述的无人集卡调度方法的步骤。
33、本发明公开了一种无人集卡调度方法、系统及存储介质,该方法包括:调度平台通过纠偏系统获取无人集卡当前位置以及无人集卡对应的装卸位置,根据无人集卡当前位置以及装卸位置生成调度任务,并将调度任务发送至无人集卡;无人集卡根据调度任务行驶至无人集卡对应的装卸引导范围;纠偏系统引导装卸引导范围内的无人集卡完成装卸。由于本发明中调度平台获取无人集卡当前位置以及无人集卡对应的装卸位置,生成调度任务,并发送至无人集卡;无人集卡根据调度任务行驶至对应的装卸引导范围;然后由纠偏系统引导完成装卸。通过发送调度任务,使无人集卡接收准确的装卸位置,到达引导范围后由纠偏系统完成再次引导,完成无人集卡的动态精准调度。
技术特征:
1.一种无人集卡调度方法,其特征在于,所述无人集卡调度方法应用于无人集卡调度系统,所述无人集卡调度系统包括:调度平台、纠偏系统和无人集卡;
2.如权利要求1所述的方法,其特征在于,所述纠偏系统包括:纠偏设备和纠偏辅助装置;
3.如权利要求2所述的方法,其特征在于,所述纠偏设备将所述无人集卡的前箱中心点位以及后箱中心点位分别调整至装卸位置,完成装卸的步骤,包括:
4.如权利要求1所述的方法,其特征在于,所述纠偏系统包括:纠偏设备和纠偏辅助装置;
5.如权利要求4所述的方法,其特征在于,所述调度平台判断所述无人集卡对应的装卸位置是否处于岸桥区域的步骤之后,还包括:
6.如权利要求1-5中任一项所述的方法,其特征在于,所述根据所述无人集卡当前位置以及所述装卸位置生成调度任务的步骤,包括:
7.如权利要求1-5中任一项所述的方法,其特征在于,所述无人集卡调度方法还包括:
8.如权利要求1-5中任一项所述的方法,其特征在于,所述无人集卡调度方法还包括:
9.一种无人集卡调度系统,其特征在于,所述无人集卡调度系统包括:调度平台、纠偏系统和无人集卡,所述系统还包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的无人集卡调度程序,所述无人集卡调度程序配置为实现如权利要求1至8中任一项所述的无人集卡调度方法的步骤。
10.一种存储介质,其特征在于,所述存储介质上存储有无人集卡调度程序,所述无人集卡调度程序被处理器执行时实现如权利要求1至8中任一项所述的无人集卡调度方法的步骤。
技术总结
本发明公开了一种无人集卡调度方法、系统及存储介质,该方法包括:调度平台通过纠偏系统获取无人集卡当前位置以及无人集卡对应的装卸位置,根据无人集卡当前位置以及装卸位置生成调度任务,并将调度任务发送至无人集卡;无人集卡根据调度任务行驶至无人集卡对应的装卸引导范围;纠偏系统引导装卸引导范围内的无人集卡完成装卸。由于本发明中调度平台获取无人集卡当前位置以及无人集卡对应的装卸位置,生成调度任务,并发送至无人集卡;无人集卡根据调度任务行驶至对应的装卸引导范围;然后由纠偏系统引导完成装卸。通过发送调度任务,使无人集卡接收准确的装卸位置,到达引导范围后由纠偏系统完成再次引导,完成无人集卡的动态精准调度。
技术研发人员:韦嘉宾,王善超,李超,韦红庆,梁丽丽,宋萍,覃熊艳,陈钟,杨圣清,宋日昆
受保护的技术使用者:东风柳州汽车有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!