一种单行道场景下基于折返避让的多AGV解锁方法
本发明涉及工业机器人的,尤其涉及一种单行道场景下基于折返避让的多agv解锁方法。
背景技术:
1、随着信息技术的高速发展,计算机的应用范围已经逐渐从互联网行业扩展到工业制造等其他领域。可以预见,计算机技术在工业制造中的应用将会越来越广泛,推动中国制造业向数字化、智能化的方向发展。目前,大多数中小型工厂采用流水线生产,这已大幅提高生产效率,但货物仍需人工搬运,自动化程度较低。而随着全球制造业和工业自动化水平的不断发展,自动引导车agv作为一种新型的自动化物流运输装备越来越受到广泛关注。研究agv调度问题的研究旨在提高工厂物流和制造流程的自动化程度,优化生产流程,提高生产效率和质量。
2、agv的路径规划是指在给定的环境中,为其寻找一条最优或有效的路径,使其能够到达目标位置或完成特定任务的过程。路径规划通常需要考虑多种因素,如起点、终点、障碍物、道路条件、交通规则、代价函数等。而当多个agv在寻找路径时,需要考虑agv的冲突问题。利用资源分配的调度策略,可以保证agv之间不发生相向冲突或节点冲突。但对于单行道而言,单一节点冲突可以扩展到一段路线的冲突问题上。当两辆agv在单行道相向而行时,需要采用一种策略,来调整agv之间的优先级效率,保证它们在发生或者即将死锁时可以通过重新规划离线来进行自主避让。
3、本发明旨在针对单行道这一特定场景,通过基于资源分配策略结合折返避让方案来解决多agv的死锁问题。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述现有单行道上的多agv存在死锁的问题,提出了本发明。
3、因此,本发明目的是提供一种单行道场景下基于折返避让的多agv解锁方法,其目的在于:在给定的单行道场景中,为多agv寻找一条最优或有效的路径,使其能够到达目标位置或完成特定任务,解决死锁的问题。
4、为解决上述技术问题,本发明提供如下技术方案:包括,其中步骤如下,根据agv当前位置点和下一个位置点构成有向图,分配agv执行的路线;
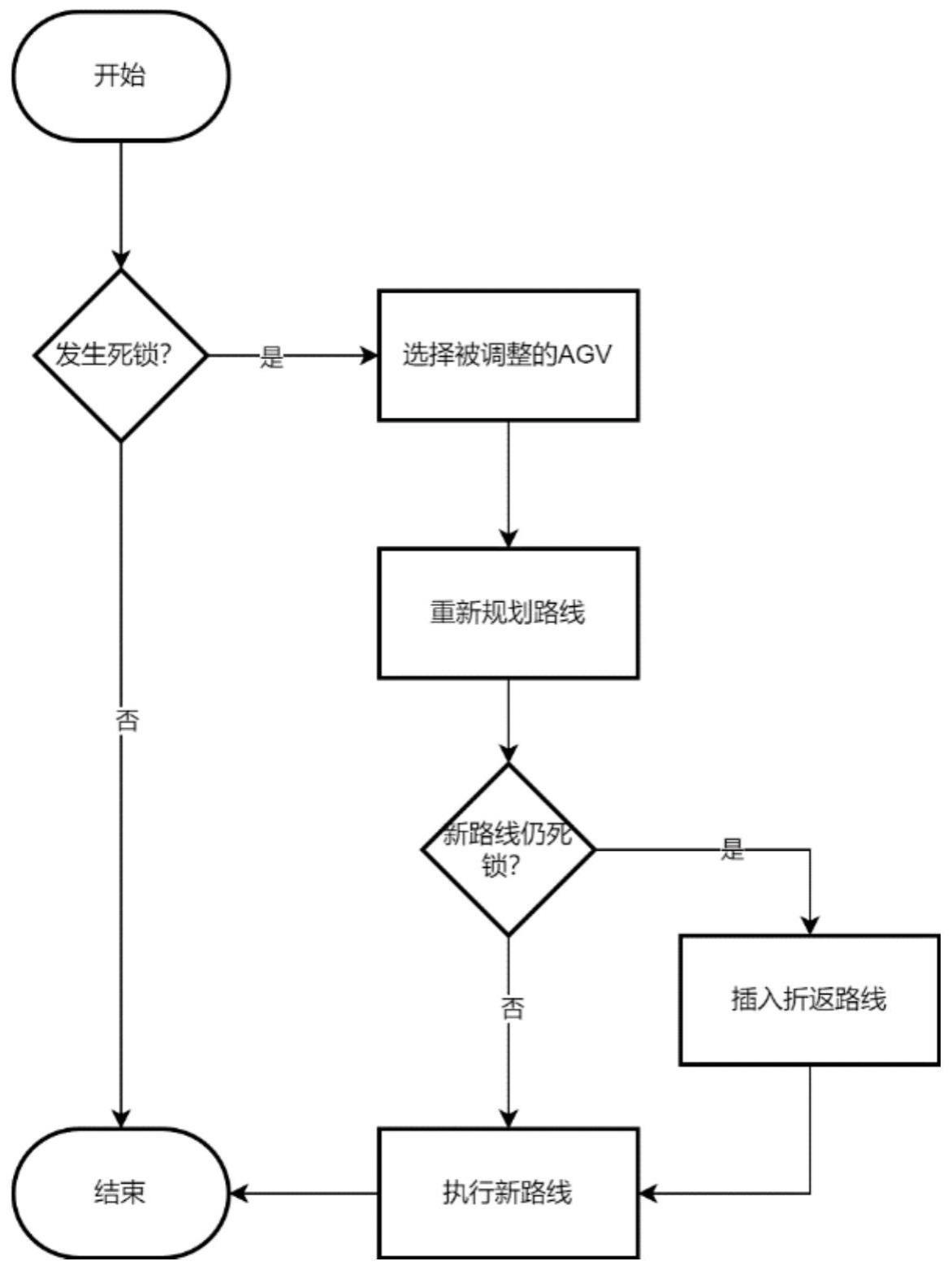
5、判断有向图是否成环,检查agv之间是否存在死锁,将死锁的agv记作vi;
6、如果存在死锁,以退让步数和允许避让的节点数作为比较条件,选择最合适的agv进行主动避让,将主动避让的agv记为vx;
7、按照允许避让点的定义,筛选出避让点集合p;
8、遍历避让点集合p,将其作为中间节点,分别规划两段路线;
9、主动避让的agv优先级小于优先通行的agv;
10、通过设置触发器,控制主动避让agv的等待和唤醒。
11、作为本发明所述单行道场景下基于折返避让的多agv解锁方法的一种优选方案,其中:所述agv的数目包括至少2个agv同时工作;所述有向图是根据地图模型以单行道作为主干道来连通生产区域和货架区域;所述单行道上设置有关联工位、若干个叶节点、避让点和待命点。
12、作为本发明所述单行道场景下基于折返避让的多agv解锁方法的一种优选方案,其中:所述单行道上面的任何一个路径的长度能够保证两个agv位于两端时不发生碰撞;在单行道的任何一个路径上,agv转弯或者原地旋转时不会影响其他agv。
13、作为本发明所述单行道场景下基于折返避让的多agv解锁方法的一种优选方案,其中:所述退让步数是指agv沿着当前路线中已完成的路段列表,逆向搜索到避让点所需的步数;允许避让点是指agv允许在此处进行避让的调度节点;如果退让步数少,则选择退让步数少的agv进行主动避让;如果退让步数相同,则选择允许避让的节点数少的agv。
14、作为本发明所述单行道场景下基于折返避让的多agv解锁方法的一种优选方案,其中:避让点的筛选条件包括后继节点数大于0;没有被空闲agv占用;没有关联任何工位;不在互锁agv的后续路线上。
15、作为本发明所述单行道场景下基于折返避让的多agv解锁方法的一种优选方案,其中:从vx当前节点的直接后继节点中筛选出允许避让点;
16、如果避让点集合p为空,那么表明vx无法直接进行避让,遍历vi的未完成的路线部分,如果找到允许避让点,则将其加入到p中;
17、如果避让点集合p仍为空,则遍历地图中定义的待命点,将所有尚未被agv占用的节点加入到集合p中。
18、作为本发明所述单行道场景下基于折返避让的多agv解锁方法的一种优选方案,其中:所述两段路线包括从vx当前位置到避让点的路线s1和避让点到目的地节点的路线s2,如果两段路线存在,则选择s1和s2的路线成本总和最小的一个避让点。
19、作为本发明所述单行道场景下基于折返避让的多agv解锁方法的一种优选方案,其中:所述主动避让的agv优先级小于优先通行的agv包括当vx移动至避让点时,如果其优先级更高,会立即获得原来的冲突点或者冲突路段的资源,那么会导致再次死锁,因此,vx申请到冲突资源必须满足优先通行的agv全部释放过冲突资源这一条件。
20、作为本发明所述单行道场景下基于折返避让的多agv解锁方法的一种优选方案,其中:所述设置触发器是为了保证互锁的agv在离开冲突路段后可以快速唤醒避让的agv,触发器的基本工作方式包括当避让的agv到达避让点时,阻塞该agv,待优先通行的agv离开冲突路段时唤醒主动避让agv。
21、作为本发明所述单行道场景下基于折返避让的多agv解锁方法的一种优选方案,其中:通过所述触发器分别判断是否允许分配冲突资源给vx和优先通行的agv是否释放过冲突资源。
22、本发明的有益效果:在单行道场景中,当agv存在死锁,通过设置的判断条件,选择最佳的agv进行主动避让,再通过筛选出来的避让点规划路线,找出优先通行的agv,再通过设置触发器,控制主动避让agv的等待和唤醒,从而解决死锁的问题。
技术特征:
1.一种单行道场景下基于折返避让的多agv解锁方法,其特征在于:具体步骤如下,
2.根据权利要求1所述的单行道场景下基于折返避让的多agv解锁方法,其特征在于:所述agv的数目包括至少2个agv同时工作;所述有向图是根据地图模型以单行道作为主干道来连通生产区域和货架区域;所述单行道上设置有关联工位、若干个叶节点、避让点和待命点。
3.根据权利要求2所述的单行道场景下基于折返避让的多agv解锁方法,其特征在于:所述单行道上面的任何一个路径的长度能够保证两个agv位于两端时不发生碰撞;在单行道的任何一个路径上,agv转弯或者原地旋转时不会影响其他agv。
4.根据权利要求3所述的单行道场景下基于折返避让的多agv解锁方法,其特征在于:所述退让步数是指agv沿着当前路线中已完成的路段列表,逆向搜索到避让点所需的步数;允许避让点是指agv允许在此处进行避让的调度节点;如果退让步数少,则选择退让步数少的agv进行主动避让;如果退让步数相同,则选择允许避让的节点数少的agv。
5.根据权利要求4所述的单行道场景下基于折返避让的多agv解锁方法,其特征在于:避让点的筛选条件包括满足后继节点数大于0;没有被空闲agv占用;没有关联任何工位;不在互锁agv的后续路线上。
6.根据权利要求5所述的单行道场景下基于折返避让的多agv解锁方法,其特征在于:从vx当前节点的直接后继节点中筛选出允许避让点;
7.根据权利要求6所述的单行道场景下基于折返避让的多agv解锁方法,其特征在于:所述两段路线包括从vx当前位置到避让点的路线s1和避让点到目的地节点的路线s2,如果两段路线存在,则选择s1和s2的路线成本总和最小的一个避让点。
8.根据权利要求7所述的单行道场景下基于折返避让的多agv解锁方法,其特征在于:所述主动避让的agv优先级小于优先通行的agv包括当vx移动至避让点时,如果其优先级更高,会立即获得原来的冲突点或者冲突路段的资源,那么会导致再次死锁,因此,vx申请到冲突资源必须满足优先通行的agv全部释放过冲突资源这一条件。
9.根据权利要求8所述的单行道场景下基于折返避让的多agv解锁方法,其特征在于:所述设置触发器是为了保证互锁的agv在离开冲突路段后可以快速唤醒避让的agv,触发器的基本工作方式包括当避让的agv到达避让点时,阻塞该agv,待优先通行的agv离开冲突路段时唤醒主动避让agv。
10.根据权利要求9所述的单行道场景下基于折返避让的多agv解锁方法,其特征在于:通过所述触发器分别判断是否允许分配冲突资源给vx和优先通行的agv是否释放过冲突资源。
技术总结
本发明公开了一种单行道场景下基于折返避让的多AGV解锁方法,具体步骤包括根据AGV当前位置点和下一个位置点构成有向图,分配AGV的执行路线;判断有向图是否成环,检查AGV之间是否存在死锁;如果存在死锁,以退让步数和允许避让的节点数作为比较条件,选择最合适的AGV进行主动避让;按照允许避让点的定义,筛选出避让点集合P;遍历避让点集合P,将其作为中间节点,分别规划两段路线;主动避让的AGV优先级小于优先通行的AGV;通过设置触发器,控制主动避让AGV的等待和唤醒;通过设置的判断条件,选择最佳的AGV进行主动避让,再重新规划路线,找出优先通行的AGV,设置触发器来控制主动避让AGV的等待和唤醒,从而解决单行道AGV死锁的问题。
技术研发人员:黄波,冯泳
受保护的技术使用者:南京邮电大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!