一种结合前轮与主轮的飞机转弯系统
本发明属于飞机转弯,涉及一种结合前轮与主轮的飞机转弯系统。
背景技术:
1、现有宽体飞机主轮多采用多轮小车式结构,在宽体客机底面转弯中常出现飞机滑行侧滑和轮胎磨损的问题,在解决上述问题时,出现了前轮与主轮协同转弯控制策略的研究,如a380、b777等宽体客机。其中多轮小车式结构的主轮多视为一个整体参与前轮与主轮协同转弯问题的解决。
2、但是,由于两侧主轮的转弯半径不同,转弯半径较小一侧主轮的转向轮转角大于转弯半径较大一侧,从而会造成主轮受到附加的侧向载荷,并且增加了轮胎磨损,侧向载荷过大甚至会导致主起落架下位锁开锁而收起的事故。同时,飞机地面转弯时主轮实际协同转角与前轮指令转角存在误差,进而导致前、主轮之间无法同步控制飞机转向,同样容易引起侧向载荷,导致轮胎侧滑。
3、因此,如何提供一种能够实现两侧主轮非对称协同控制的同时,对前轮实时进行转向角度反馈控制的飞机转弯系统是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提出了一种结合前轮与主轮的飞机转弯系统,以解决上述现有技术问题。
2、为了实现上述目的,本发明采用如下技术方案:
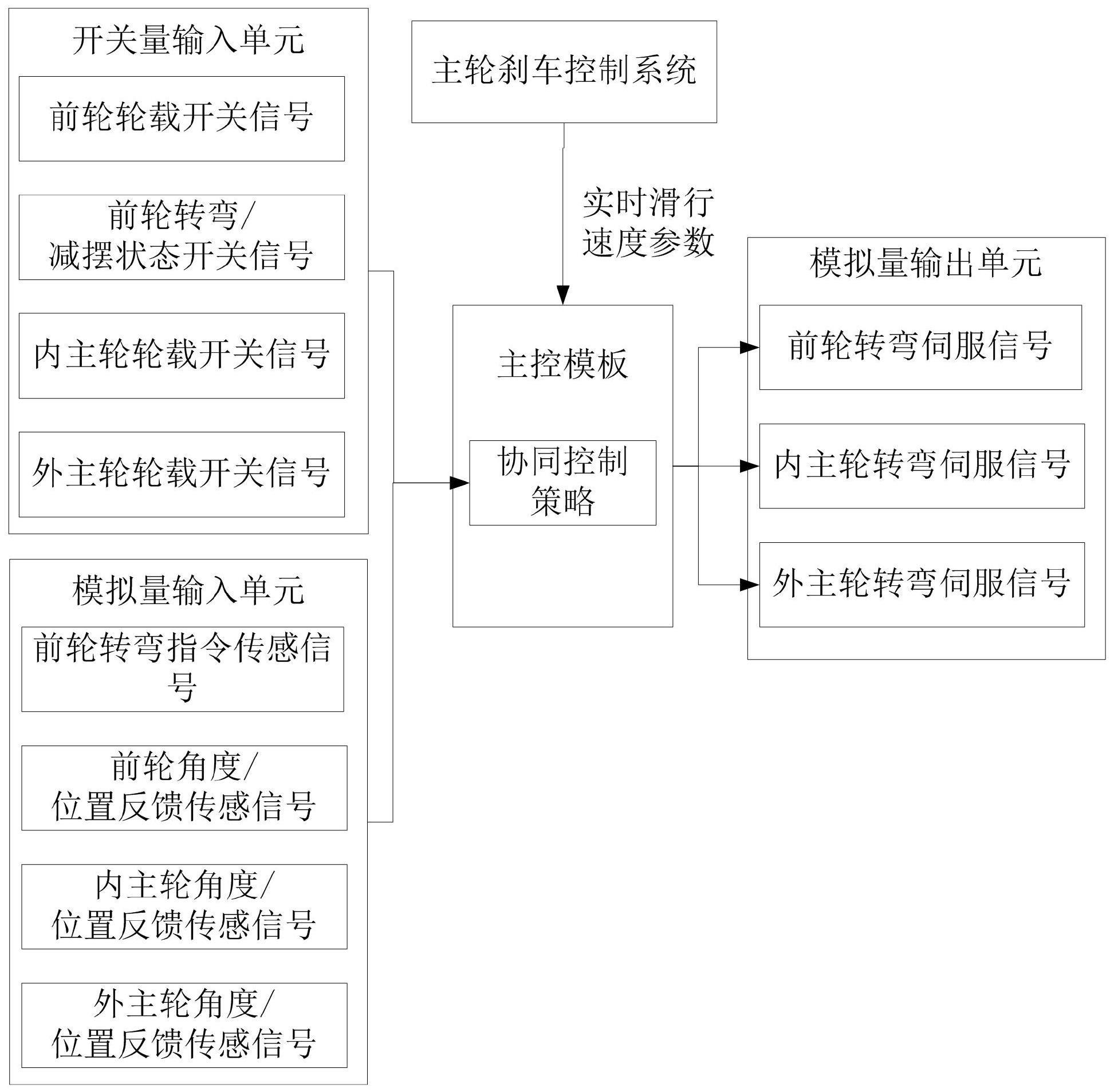
3、本发明公开了一种结合前轮与主轮的飞机转弯系统,包括:控制模板、开关量输入单元、模拟量输入单元和模拟量输出单元;
4、所述开关量输入单元,用于获取前轮轮载开关信号、前轮转弯/减摆状态开关信号、内主轮轮载开关信号和外主轮轮载开关信号,并发送至所述控制模板;
5、所述模拟量输入单元,用于获取前轮转弯指令传感信号、前轮角度/位置反馈传感信号、内主轮角度/位置反馈传感信号和外主轮角度/位置反馈传感信号,并发送至所述控制模板;
6、所述模拟量输出单元,用于输出前轮转弯伺服信号、内主轮转弯伺服信号和外主轮转弯伺服信号;
7、所述控制模板用于执行如下协同控制策略:
8、根据前轮轮载开关信号、内主轮轮载开关信号和外主轮轮载开关信号触发协同控制策略启动;
9、根据前轮转弯指令传感信号计算出前轮转弯角度;
10、获取主轮刹车控制系统输出的实时滑行速度参数,并计算飞机实时转弯弧长,结合所述前轮转弯角度计算得到转弯半径;
11、利用所述转弯半径以及飞机前轮、内主轮和外主轮之间的结构参数计算得到内主轮转角和外主轮转角,并发送至所述模拟量输出单元输出所述内主轮转弯伺服信号和外主轮转弯伺服信号;
12、根据内主轮角度/位置反馈传感信号计算其与所述内主轮转角的误差;根据外主轮角度/位置反馈传感信号计算其与所述外主轮转角的误差;
13、根据所述误差计算前轮转弯补偿角,并发送至所述模拟量输出单元输出所述前轮转弯伺服信号。
14、优选的,所述开关量输入单元,还用于获取前起落架下位锁开关信号,并发送至所述控制模板,所述控制模板根据前起落架下位锁开关信号控制系统电源的启停。
15、优选的,开关量输入单元,还用于获取前轮转弯增益切换开关信号,并发送至所述控制模板,所述控制模板实时判断主轮刹车控制系统输出的实时滑行速度参数是否低于设定最大滑行速度阈值;
16、若否,则切换为前轮转弯增益关信号,触发协同控制策略停止;
17、若是,则切换为前轮转弯增益开信号,判断前轮角度/位置反馈传感信号是否高于设定最小前轮转弯角度阈值,若是,则触发协同控制策略启动。
18、优选的,所述获取主轮刹车控制系统输出的实时滑行速度参数,并计算飞机实时转弯弧长,结合所述前轮转弯角度计算得到转弯半径,具体包括:
19、
20、其中,l为飞机在地面模式下的转弯弧长,t为飞机的实时滑行时长;v为飞机的滑行速度;
21、
22、其中,r为飞机在地面模式下的转弯半径;γ为前轮转弯角度。
23、优选的,所述利用所述转弯半径以及飞机前轮、内主轮和外主轮之间的结构参数计算得到内主轮转角和外主轮转角,具体包括:
24、所述飞机前轮、内主轮和外主轮之间的结构参数包括:内主轮与外主轮之间的轮距h,前轮与内主轮、外主轮之间中轴线的距离s;
25、计算得到内主轮转角和外主轮转角:
26、
27、
28、其中:α为内主轮转角;β为外主轮转角;r为飞机在地面模式下的转弯半径。
29、优选的,所述控制模板采用dsp+cpld结构模式,所述开关量输入单元、模拟量输入单元和模拟量输出单元与所述控制模板的dsp全部i/o信号之间采用光电隔离。
30、优选的,所述dsp输出pwm信号,经缓冲器驱动光耦、史密斯触发器整形以及滤波电路,经v/i转换电路后获得前轮转弯伺服信号、内主轮转弯伺服信号和外主轮转弯伺服信号,再驱动相应伺服阀线圈。
31、优选的,还包括,开关量输出单元,用于输出前轮转弯状态信号、前轮转弯故障信号、前轮转弯状态切换阀状态:主轮转弯状态信号、主轮转弯故障信号和主轮转弯状态切换阀状态。
32、优选的,所述飞机转弯系统包括双通道主控器件,包括:开关量输入单元、模拟量输入单元、模拟量输出单元和开关量输出单元均为双路配置,主控模板的接口模块为双通道热备方式;
33、所述主控模板包括双通道逻辑切换电路和bit故障检测电路,所述bit故障检测电路用于对参与飞机转向功能的各个电气组件进行自动测试和故障检测;
34、双通道主控器件正常的情况下依靠相互之间的通讯信息,进行两条通道的交叉切换,自动寻找到一条无控制部件故障的通道,当这条通道的检测部件无故障时,输出无故障信号;
35、当交叉通道的控制部件正常而bit检测部件有故障时,输出有故障信号,提示进行无实时优化和实时协同的转弯操作;
36、当双通道主控器件中的一个通道或两个通道同时故障,则输出前轮与主轮转弯功能失效信号。
37、经由上述的技术方案可知,与现有技术相比,本发明具有以下有益效果:
38、1.本发明充分考虑多轮小车式结构的宽体客机在转弯时,内主轮和外主轮之间转向角之间的不对称差异,提出了一种内外侧轮非对称控制策略;
39、2.本发明利用内外主轮转角的实际反馈传感信号与计算得到的内外主轮转角之间的误差,判断与前轮指令转角是否实时吻合,从而有效解决前、主轮之间无法同步控制飞机转向的问题;
40、3.本发明将前起落架下位锁开关信号作为飞机转向控制系统电源的启停的触发信号,有效避免侧向载荷过大甚至会导致主起落架下位锁开锁而收起的事故;
41、4.本发明还具有故障检测与通道切换工作功能,保证系统正常工作,若无法实现控制策略能自动使系统转向减摆状态,确保飞机安全。
技术特征:
1.一种结合前轮与主轮的飞机转弯系统,其特征在于,包括:控制模板、开关量输入单元、模拟量输入单元和模拟量输出单元;
2.根据权利要求1所述的一种结合前轮与主轮的飞机转弯系统,其特征在于,所述开关量输入单元,还用于获取前起落架下位锁开关信号,并发送至所述控制模板,所述控制模板根据前起落架下位锁开关信号控制系统电源的启停。
3.根据权利要求1所述的一种结合前轮与主轮的飞机转弯系统,其特征在于,开关量输入单元,还用于获取前轮转弯增益切换开关信号,并发送至所述控制模板,所述控制模板实时判断主轮刹车控制系统输出的实时滑行速度参数是否低于设定最大滑行速度阈值;
4.根据权利要求1所述的一种结合前轮与主轮的飞机转弯系统,其特征在于,所述获取主轮刹车控制系统输出的实时滑行速度参数,并计算飞机实时转弯弧长,结合所述前轮转弯角度计算得到转弯半径,具体包括:
5.根据权利要求1所述的一种结合前轮与主轮的飞机转弯系统,其特征在于,所述利用所述转弯半径以及飞机前轮、内主轮和外主轮之间的结构参数计算得到内主轮转角和外主轮转角,具体包括:
6.根据权利要求1所述的一种结合前轮与主轮的飞机转弯系统,其特征在于,所述控制模板采用dsp+cpld结构模式,所述开关量输入单元、模拟量输入单元和模拟量输出单元与所述控制模板的dsp全部i/o信号之间采用光电隔离。
7.根据权利要求6所述的一种结合前轮与主轮的飞机转弯系统,其特征在于,所述dsp输出pwm信号,经缓冲器驱动光耦、史密斯触发器整形以及滤波电路,经v/i转换电路后获得前轮转弯伺服信号、内主轮转弯伺服信号和外主轮转弯伺服信号,再驱动相应伺服阀线圈。
8.根据权利要求1所述的一种结合前轮与主轮的飞机转弯系统,其特征在于,还包括,开关量输出单元,用于输出前轮转弯状态信号、前轮转弯故障信号、前轮转弯状态切换阀状态:主轮转弯状态信号、主轮转弯故障信号和主轮转弯状态切换阀状态。
9.根据权利要求8所述的一种结合前轮与主轮的飞机转弯系统,其特征在于,所述飞机转弯系统包括双通道主控器件,包括:开关量输入单元、模拟量输入单元、模拟量输出单元和开关量输出单元均为双路配置,主控模板的接口模块为双通道热备方式;
技术总结
本发明提供了一种结合前轮与主轮的飞机转弯系统,包括:控制模板、开关量输入单元、模拟量输入单元和模拟量输出单元;控制模板用于执行协同控制策略:根据前轮转弯指令传感信号和实时滑行速度参数计算得到转弯半径;利用转弯半径以及飞机前轮、内主轮和外主轮之间的结构参数计算内主轮转角和外主轮转角,并输出内主轮转弯伺服信号和外主轮转弯伺服信号;根据内主轮角度/位置反馈传感信号计算其与内主轮转角的误差计算前轮转弯补偿角,并输出前轮转弯伺服信号。本发明提出了一种内外侧轮非对称控制策略,能够实现两侧主轮非对称协同控制的同时,对前轮实时进行转向角度反馈控制,实现前、主轮之间飞机转向的同步控制。
技术研发人员:廖力清,彭浩,凌玉华,李中华,李繁飙,杨建
受保护的技术使用者:中南大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!