一种智能无人值守的巡检飞行器的制作方法
本发明涉及飞行器,具体而言,涉及一种智能无人值守的巡检飞行器。
背景技术:
1、随着社会的发展,智能设备在减轻人工作负担的同时更提高了工作效率,但在一些需要巡视和监管的地区,如地形查看、风沙治理,为其架设固定的视频监控系统来巡视查看,往往付出更多的人工和更高的费用,而且巡视范围小不灵活。
技术实现思路
1、本发明解决的问题是提供一种设置简单、灵活便携的智能无人值守巡检飞行器。
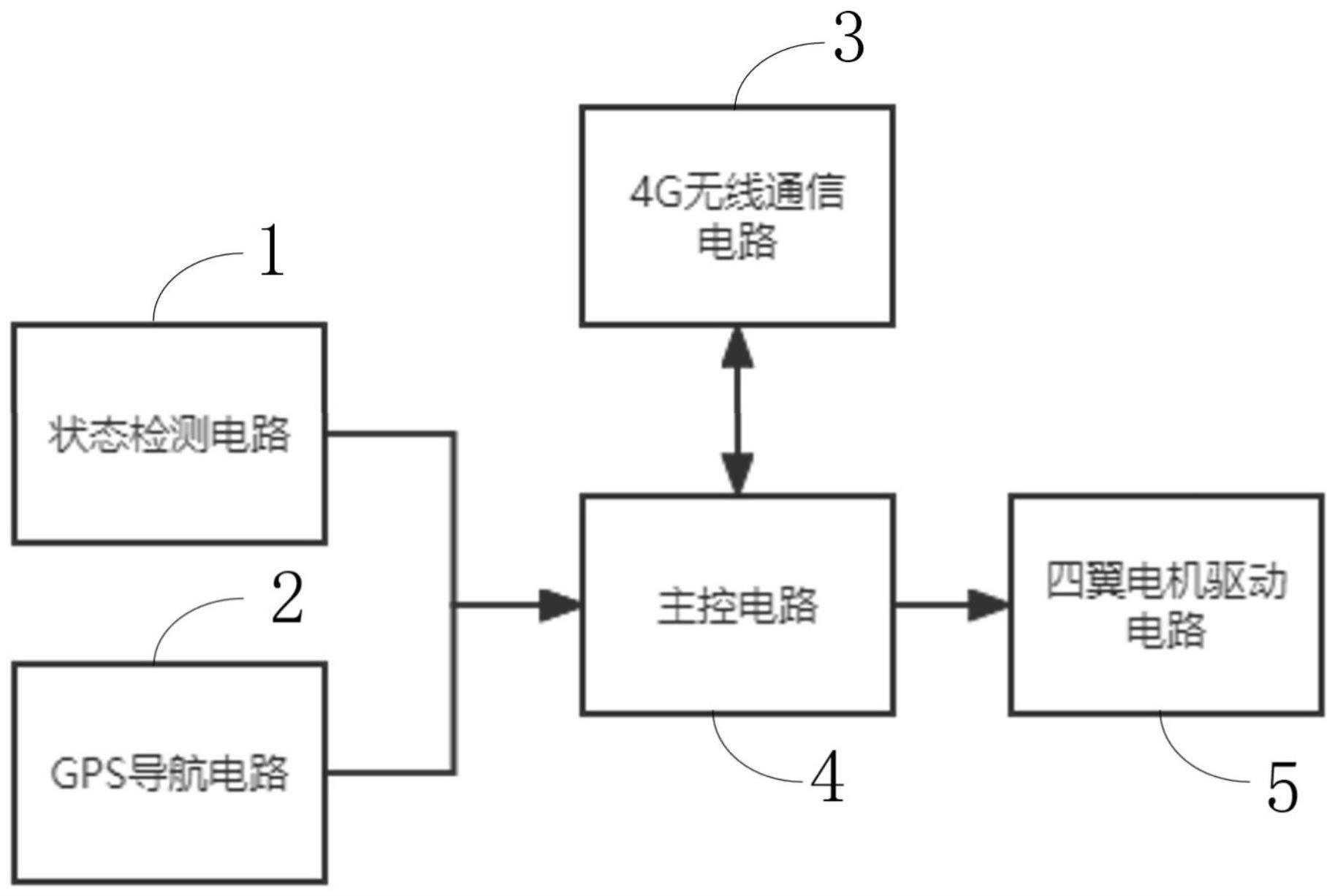
2、为解决上述问题,本发明提供一种智能无人值守的巡检飞行器,其特征在于,包括状态检测电路、gps导航电路、4g无线通信电路、主控电路、四旋翼电机驱动电路,所述状态检测电路的输出端和所述主控电路的输入端连接,反馈自身状态、周围环境信息到主控电路,所述主控电路的输入端和所述gps导航电路的输出端连接,用于定位自身的位置并且保证飞行航线的准确,所述主控电路的通讯端和所述4g无线通信电路的数据端连接,接收规划的续点位置飞行信息,由多架结构一致的飞行器组队轮守飞行并通过通讯电路实时发送飞行数据,所述主控电路的驱动端和所述第四旋翼电机驱动电路的输入端连接,用以结合规划飞行线路控制飞行方向。
3、进一步的,所述检测电路包括环境检测电路和运动传感器电路,所述环境检测电路的输出端和所述主控电路的输入端连接,发送飞行器周围环境的温度、气压、磁场信息,所述主控电路的输出端和所述运动传感器电路的输入端连接,接收飞行器的加速度和陀螺仪数据,并通过周围环境信息提前数据校正使飞行顺畅稳定。
4、进一步的,所述gps导航电路包括第一定位导航芯片、第一rc滤波电路、第一发光二极管、第一上拉电阻、第一lc滤波电路、第一rf天线、第二rc滤波电路、第二发光二极管、第一二极管、第二滤波电容,所述第一定位导航芯片的工作端经所述第一rc滤波电路和所述第一发光二极管的阳极连接,电源经所述第一上拉电阻和所述第一定位导航芯片的复位端连接,所述第一定位导航芯片的定位端经所述第一lc滤波电路和所述第一rf天线连接,所述第一定位导航芯片的定位端经所述第二rc滤波电路和所述第二发光二极管的阳极连接,电源过所述第二滤波电容经所述第一二极管的阳极和所述第一定位导航芯片的电源端连接。
5、进一步的,所述4g无线通信电路包括4g网络电路、4g图传电路,所述4g网络电路的数据端和所述主控电路的数据端连接,将主控电路处理、接收的信息发送给用户,用户可通过4g网络电路控制飞行器的飞行轨迹,所述4g图传电路的图像输出端和所述主控电路的输入端连接,实时发送飞行器记录的图像信息。
6、进一步的,所述主控电路的输入端和所述状态检测电路的输出端,接收机器各项数据及时提前控制,所述gps导航电路的输出端和所述主控电路的输入端连接,发送各个飞行器的位置信息,便于主控电路对各个飞行器进行定位和飞行规划。
7、进一步的,所述四旋翼电机驱动电路包括驱动电路和控制电路,所述驱动电路的输入端和所述主控电路的输出端连接,接收主控的信号并发出对应的驱动信号,所述驱动电路的信号输出端分别和3路所述控制电路的输出端连接,发送3个方向的驱动信息。
8、进一步的,所述控制电路包括第一场效应管第一场效应管、第一开关电路、第二场效应管、第二开关电路,驱动电路的信号输入端经所述第一开关电路和所述第一场效应管的栅极连接,所述第一场效应管的源极接地,所述第一场效应管的漏极分别和所述第二场效应管的源极、电机接口连接,所述第二场效应管的漏极和电源连接,驱动电路的信号输入端经所述第二开关电路和所述第二场效应管的栅极连接。
9、进一步的,还包括电源充电电路,所述电源充电电路的信号输入端和所述主控电路的输出端连接,所述电源充电电路的电源输出端分别和电池端、电源电路的输入端连接,对电池和系统进行充电、供电。
10、进一步的,还包括电源检测电路,所述电源检测电路的输入端和电池的电源端连接,实时检测电池的电量,所述主控电路的输入端和所述电源检测电路的输出端连接,接收电池电量信息并规划降落点。
11、进一步的,所述电源电路包括第一dc芯片、第七电源滤波电路、第二lc滤波电路、第六二极管、第三稳压二极管、第三lc滤波电路,电池电源经所述第七电源滤波电路和所述第一dc芯片的电源输入端连接,供电电源经所述第六二极管的阳极再过所述第二lc滤波电路和所述第一dc芯片的电源输入端连接,所述第一dc芯片的反馈端和所述第一dc芯片的输出端连接,所述第一dc芯片的输出端经所述第三稳压二极管的阴极和地连接,所述第一dc芯片的输出端经所述第三lc滤波电路输出给设备供电。
12、与现有技术相比,本发明的有益效果是:
13、提供一种设置简单、灵活便携的智能无人值守巡检飞行器,该飞行器的状态检测电路能实时给主控电路反馈飞行器自身的姿态状况和周围环境的磁场、气压、温度,所述gps导航电路既能时刻反馈自身位置信息,当发现异常时可快速定位飞行器位置,并且可通过主控电路设置飞行巡检路线,减轻人工负担,主控电路通过4g无线通信电路经实时画面传输到服务器,用户无论在任何地方都可以查看并且操控飞行器进行细致探究,结合状态检测电路提供的数据信息,主控电路控制四旋翼电机驱动电路使飞行器更快、更平稳、更安全的飞行,飞行器可通过4g无线通信电路接收远程手机app中规划的飞行方位以及规划的续点位置飞行,设置简单且飞行器体积小携带便捷,该巡检飞行器也可由多架结构一致的飞行器组队轮守飞行,增加巡检的范围。
技术特征:
1.一种智能无人值守的巡检飞行器,其特征在于,包括状态检测电路(1)、gps导航电路(2)、4g无线通信电路(3)、主控电路(4)、四旋翼电机驱动电路(5),所述状态检测电路(1)的输出端和所述主控电路(4)的输入端连接,反馈自身状态、周围环境信息到主控电路(4),所述主控电路(4)的输入端和所述gps导航电路(2)的输出端连接,用于定位自身的位置并且保证飞行航线的准确,所述主控电路(4)的通讯端和所述4g无线通信电路(3)的数据端连接,接收规划的续点位置飞行信息,由多架结构一致的飞行器组队轮守飞行并通过通讯电路实时发送飞行数据,所述主控电路(4)的驱动端和所述第四旋翼电机驱动电路(5)的输入端连接,用以结合规划飞行线路控制飞行方向。
2.根据权利要求1所述的智能无人值守的巡检飞行器,其特征在于,所述状态检测电路(1)包括环境检测电路和运动传感器电路,所述环境检测电路的输出端和所述主控电路(4)的输入端连接,发送飞行器周围环境的温度、气压、磁场信息,所述主控电路(4)的输出端和所述运动传感器电路的输入端连接,接收飞行器的加速度和陀螺仪数据,并通过周围环境信息提前数据校正使飞行顺畅稳定。
3.根据权利要求1所述的智能无人值守的巡检飞行器,其特征在于,所述gps导航电路(2)包括第一定位导航芯片、第一rc滤波电路、第一发光二极管、第一上拉电阻、第一lc滤波电路、第一rf天线、第二rc滤波电路、第二发光二极管、第一二极管、第二滤波电容,所述第一定位导航芯片的工作端经所述第一rc滤波电路和所述第一发光二极管的阳极连接,电源经所述第一上拉电阻和所述第一定位导航芯片的复位端连接,所述第一定位导航芯片的定位端经所述第一lc滤波电路和所述第一rf天线连接,所述第一定位导航芯片的定位端经所述第二rc滤波电路和所述第二发光二极管的阳极连接,电源过所述第二滤波电容经所述第一二极管的阳极和所述第一定位导航芯片的电源端连接。
4.根据权利要求1所述的智能无人值守的巡检飞行器,其特征在于,所述4g无线通信电路(3)包括4g网络电路(31)、4g图传电路(32),所述4g网络电路(31)的数据端和所述主控电路(4)的数据端连接,将主控电路(4)处理、接收的信息发送给用户,用户可通过4g网络电路(31)控制飞行器的飞行轨迹,所述4g图传电路(32)的图像输出端和所述主控电路(4)的输入端连接,实时发送飞行器记录的图像信息。
5.根据权利要求1所述的智能无人值守的巡检飞行器,其特征在于,所述主控电路(4)的输入端和所述状态检测电路(1)的输出端,接收机器各项数据及时提前控制,所述gps导航电路(2)的输出端和所述主控电路(4)的输入端连接,发送各个飞行器的位置信息,便于主控电路(4)对各个飞行器进行定位和飞行规划。
6.根据权利要求1所述的智能无人值守的巡检飞行器,其特征在于,所述四旋翼电机驱动电路(5)包括驱动电路(51)和控制电路(52),所述驱动电路(51)的输入端和所述主控电路(4)的输出端连接,接收主控的信号并发出对应的驱动信号,所述驱动电路(51)的信号输出端分别和3路所述控制电路(52)的输出端连接,发送3个方向的驱动信息。
7.根据权利要求6所述的智能无人值守的巡检飞行器,其特征在于,所述控制电路(52)包括第一场效应管第一场效应管、第一开关电路、第二场效应管、第二开关电路,驱动电路(51)的信号输入端经所述第一开关电路和所述第一场效应管的栅极连接,所述第一场效应管的源极接地,所述第一场效应管的漏极分别和所述第二场效应管的源极、电机接口连接,所述第二场效应管的漏极和电源连接,驱动电路(51)的信号输入端经所述第二开关电路和所述第二场效应管的栅极连接。
8.根据权利要求1所述的智能无人值守的巡检飞行器,其特征在于,还包括电源充电电路(6),所述电源充电电路(6)的信号输入端和所述主控电路(4)的输出端连接,所述电源充电电路(6)的电源输出端分别和电池端、电源电路的输入端连接,对电池和系统进行充电、供电。
9.根据权利要求8所述的智能无人值守的巡检飞行器,其特征在于,还包括电源检测电路(7),所述电源检测电路(7)的输入端和电池的电源端连接,实时检测电池的电量,所述主控电路(4)的输入端和所述电源检测电路(7)的输出端连接,接收电池电量信息并规划降落点。
10.根据权利要求8所述的智能无人值守的巡检飞行器,其特征在于,所述电源电路(8)包括第一dc芯片、第七电源滤波电路、第二lc滤波电路、第六二极管、第三稳压二极管、第三lc滤波电路,电池电源经所述第七电源滤波电路和所述第一dc芯片的电源输入端连接,供电电源经所述第六二极管的阳极再过所述第二lc滤波电路和所述第一dc芯片的电源输入端连接,所述第一dc芯片的反馈端和所述第一dc芯片的输出端连接,所述第一dc芯片的输出端经所述第三稳压二极管的阴极和地连接,所述第一dc芯片的输出端经所述第三lc滤波电路输出给设备供电。
技术总结
本发明涉及飞行器技术领域,提供了一种智能无人值守的巡检飞行器,包括状态检测电路、GPS导航电路、4G无线通信电路、主控电路、四旋翼电机驱动电路,所述状态检测电路的输出端和所述主控电路的输入端连接,反馈自身状态、周围环境信息到主控电路,所述主控电路的输入端和所述GPS导航电路的输出端连接,用于定位自身的位置并且保证飞行航线的准确,所述主控电路的通讯端和所述4G无线通信电路的数据端连接,接收规划的续点位置飞行信息,由多架结构一致的飞行器组队轮守飞行并通过通讯电路实时发送飞行数据,所述主控电路的驱动端和所述第四旋翼电机驱动电路的输入端连接,用以结合规划飞行线路控制飞行方向;本发明可实现一种智能无人值守的巡检飞行器。
技术研发人员:刘南,卢岳,杨通,张智强,范必衍
受保护的技术使用者:中核检修有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!