摆头的摆动范围控制方法、装置及设备与流程
本申请涉及电机,尤其涉及一种摆头的摆动范围控制方法、装置及设备。
背景技术:
1、目前许多的机械传动机构是需要前、上、下、左和右摆动;例如风扇和舞台灯要实现立体式摆动,因此设计出了摆头装置,摆头装置都是由电机驱动进行摆动以控制摆头角度的变化,在摆头装置运转过程中,经常需要围绕摆头零位控制摆头的摆动范围。现有的摆头摆动范围控制方法是通过增设位置传感器进行摆头角度的控制,由于增加了传感器摆头装置的体积不可避免的变大,制造成本增加,并且体积较大的摆头装置也容易导致便携性较差,安装摆头装置的设备也需要预留更多的安装空间。可见,现有的摆头摆动范围控制方法存在着成本高、便携性差等问题。
技术实现思路
1、本申请提供了一种摆头的摆动范围控制方法、装置及设备,从而可以在无位置传感器的情况下,随时设置摆头的摆动范围,达到控制摆头摆动的目的。
2、第一方面,本申请提供了一种摆头的摆动范围控制方法,包括:
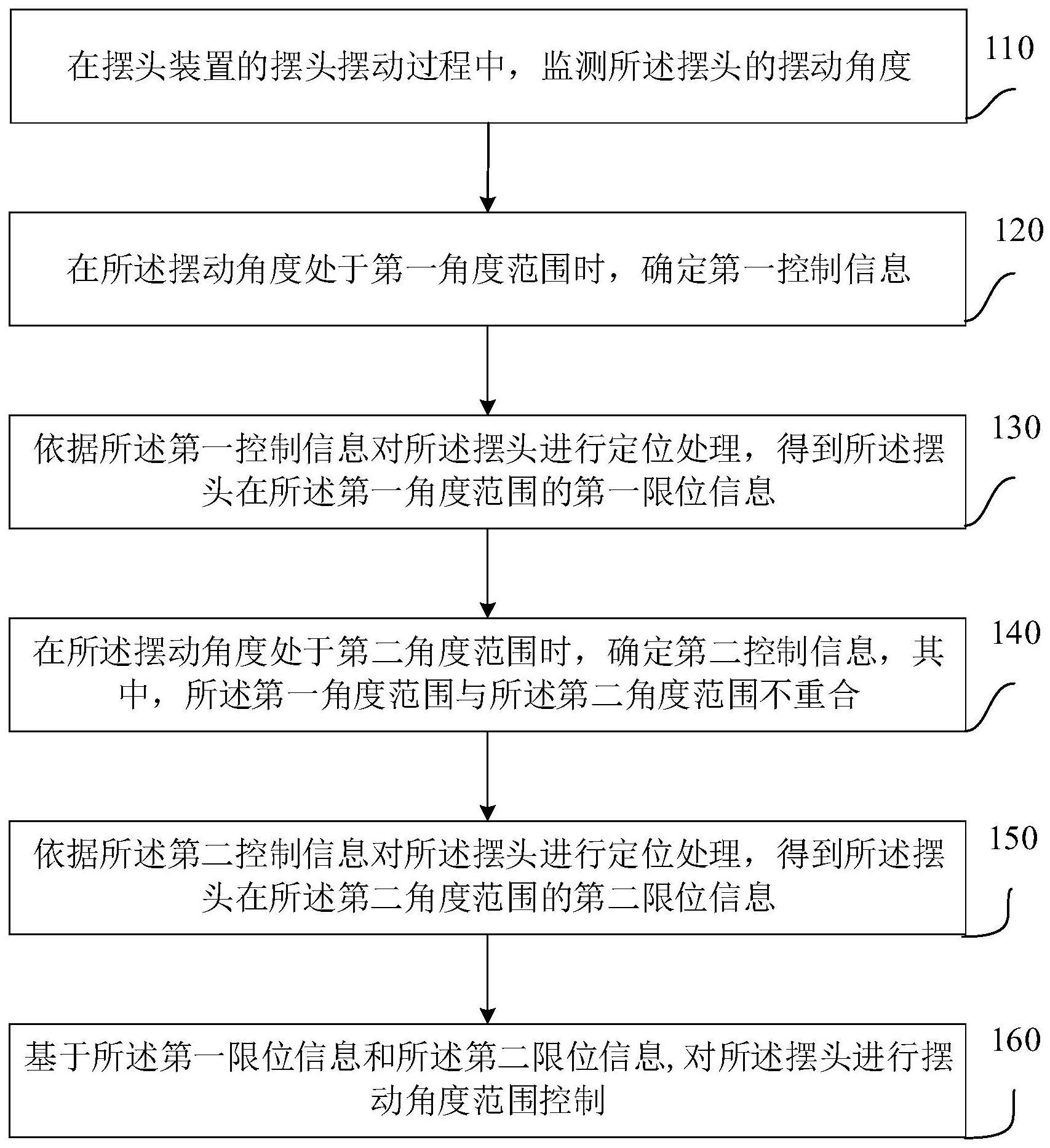
3、在摆头装置的摆头摆动过程中,监测所述摆头的摆动角度;
4、在所述摆动角度处于第一角度范围时,确定第一控制信息;
5、依据所述第一控制信息对所述摆头进行定位处理,得到所述摆头在所述第一角度范围的第一限位信息;
6、在所述摆动角度处于第二角度范围时,确定第二控制信息,其中,所述第一角度范围与所述第二角度范围不重合;
7、依据所述第二控制信息对所述摆头进行定位处理,得到所述摆头在所述第二角度范围的第二限位信息;
8、基于所述第一限位信息和所述第二限位信息,对所述摆头进行摆动角度范围控制。
9、可选的,所述在所述摆动角度处于第一角度范围时,确定第一控制信息,包括:
10、在所述摆动角度处于第一角度范围时,接收所述摆头的第一定位操作,并从所述第一定位操作中提取所述第一定位信息;
11、接收所述第一定位信息对应的第一换向操作,并从所述第一换向操作中提取所述第一换向信息;
12、基于所述第一定位信息和所述第一换向信息,确定所述第一控制信息。
13、可选的,所述依据所述第一控制信息对所述摆头进行定位处理,得到所述摆头在所述第一角度范围的第一限位信息,包括:
14、基于所述第一定位信息进行摆头定位,得到所述摆头在所述第一角度范围的第一角度信息;
15、基于所述第一角度信息进行限位,得到所述第一限位信息。
16、可选的,所述得到所述第一限位信息之后,还包括:
17、基于所述第一换向信息,确定所述第二角度范围;
18、控制所述摆头向所述第二角度范围摆动。
19、可选的,所述确定所述第二角度范围之前,还包括:
20、确定所述摆头的二次限位控制信息;
21、基于所述二次限位控制信息确定所述二次限位信息;
22、基于所述二次限位信息对所述第一限位信息进行限位更新。
23、可选的,所述依据所述第二控制信息对所述摆头进行定位处理,得到所述摆头在所述第二角度范围的第二限位信息,包括:
24、获取所述摆头的摆头零位信息;
25、基于所述第二控制信息,结合所述摆头零位信息,确定所述第二限位信息。
26、可选的,所述依据所述第二控制信息对所述摆头进行定位处理,得到所述摆头在所述第二角度范围的第二限位信息,包括:
27、基于所述第二控制信息进行摆头定位,得到所述摆头在所述第二运动范围的第二定位信息;
28、基于所述第二定位信息,确定所述第二限位信息。
29、可选的,所述基于所述第一限位信息和所述第二限位信息,对所述摆头进行摆动角度范围控制,包括:
30、基于所述第一限位信息确定第一控制角度,并基于所述第二限位信息确定第二控制角度;
31、基于所述第一控制角度和所述第二控制角度,确定所述摆头的控制范围。
32、第二方面,本申请提供了一种摆头的摆动范围控制装置,包括:
33、监测模块,用于在摆头装置的摆头摆动过程中,监测所述摆头的摆动角度;
34、第一控制信息确定模块,用于在所述摆动角度处于第一角度范围时,确定第一控制信息;
35、第一限位信息确定模块,用于依据所述第一控制信息对所述摆头进行定位处理,得到所述摆头在所述第一角度范围的第一限位信息;
36、第二控制信息确定模块,用于在所述摆动角度处于第二角度范围时,确定第二控制信息,其中,所述第一角度范围与所述第二角度范围不重合;
37、第二限位信息确定模块,用于依据所述第二控制信息对所述摆头进行定位处理,得到所述摆头在所述第二角度范围的第二限位信息;
38、控制模块,用于基于所述第一限位信息和所述第二限位信息,对所述摆头进行摆动角度范围控制。
39、第三方面,本申请提供了一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;
40、存储器,用于存放计算机程序;
41、处理器,用于执行存储器上所存放的程序时,实现如第一方面任一项实施例所述的摆头的摆动范围控制方法的步骤。
42、综上,本申请实施例在摆头装置的摆头摆动过程中,监测摆头的摆动角度,在摆动角度处于第一角度范围时,确定第一控制信息,依据第一控制信息对摆头进行定位处理,得到摆头在第一角度范围的第一限位信息,在摆动角度处于第二角度范围时,确定第二控制信息,其中,第一角度范围与第二角度范围不重合,依据第二控制信息对摆头进行定位处理,得到摆头在第二角度范围的第二限位信息,基于第一限位信息和第二限位信息,对摆头进行摆动角度范围控制,从而无需增设位置传感器即可随时设置摆头的摆动范围,实现摆头摆动范围的控制,进而达到控制摆头摆动的目的。
技术特征:
1.一种摆头的摆动范围控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述在所述摆动角度处于第一角度范围时,确定第一控制信息,包括:
3.根据权利要求2所述的方法,其特征在于,所述依据所述第一控制信息对所述摆头进行定位处理,得到所述摆头在所述第一角度范围的第一限位信息,包括:
4.根据权利要求3所述的方法,其特征在于,所述得到所述第一限位信息之后,还包括:
5.根据权利要求4所述的方法,其特征在于,所述确定所述第二角度范围之前,还包括:
6.根据权利要求1所述的方法,其特征在于,所述依据所述第二控制信息对所述摆头进行定位处理,得到所述摆头在所述第二角度范围的第二限位信息,包括:
7.根据权利要求1所述的方法,其特征在于,所述依据所述第二控制信息对所述摆头进行定位处理,得到所述摆头在所述第二角度范围的第二限位信息,包括:
8.根据权利要求1-7任一项所述的方法,其特征在于,所述基于所述第一限位信息和所述第二限位信息,对所述摆头进行摆动角度范围控制,包括:
9.一种摆头的摆动范围控制装置,其特征在于,包括:
10.一种电子设备,其特征在于,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;
技术总结
本申请涉及一种摆头的摆动范围控制方法、装置及设备,涉及电机技术领域,该方法包括:在摆头装置的摆头摆动过程中,监测摆头的摆动角度,在摆动角度处于第一角度范围时,确定第一控制信息,依据第一控制信息对摆头进行定位处理,得到摆头在第一角度范围的第一限位信息,在摆动角度处于第二角度范围时,确定第二控制信息,其中,第一角度范围与第二角度范围不重合,依据第二控制信息对摆头进行定位处理,得到摆头在第二角度范围的第二限位信息,基于第一限位信息和第二限位信息,对摆头进行摆动角度范围控制,从而无需增设位置传感器即可实现摆头摆动范围的控制。
技术研发人员:史瑞斌,张星火
受保护的技术使用者:艾美特电器(深圳)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!