一种飞机大机动转弯自动控制方法及装置与流程
本申请属于飞行控制,特别涉及一种飞机大机动转弯自动控制方法及装置。
背景技术:
1、飞机的转弯都要改变航迹方位角,而航迹方位角的改变主要是通过飞机滚转和法向过载来实现的。一般都是先滚转一个角度,然后再通过控制法向过载来实现转弯,当转到了需要的航迹方位角附近,再将飞机改为平飞。
2、任务机一般都涉及剧烈的轨迹和航向/航迹变化,为了快速改变机头指向或者改变飞行方向,一般都需要大机动转弯。如果采用人工来控制飞机大机动转弯,会给飞行员带来较大的操作负担,并且控制效果因人而异。
技术实现思路
1、为了解决上述问题,本申请提供了一种飞机大机动转弯自动控制方法及装置,以减轻飞行员负担。
2、本申请第一方面提供了一种飞机大机动转弯自动控制方法,主要包括:
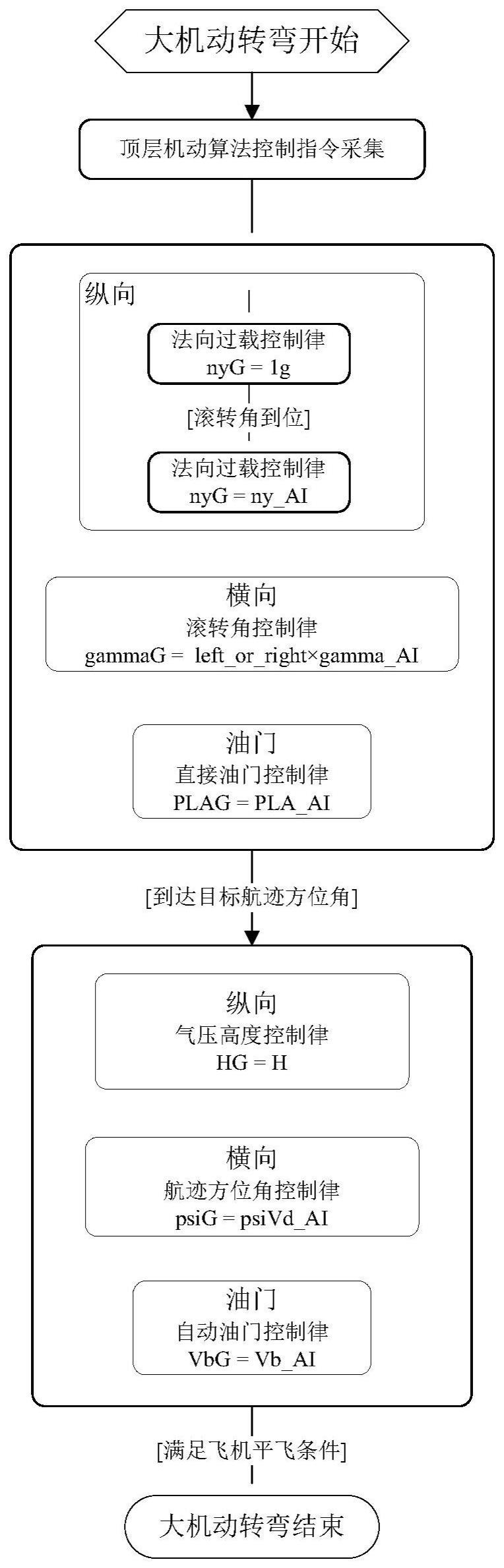
3、步骤s1、采集顶层机动算法给出的控制指令,所述控制指令包括法向过载指令、滚转角指令、航迹方位角指令、速度指令、油门指令及转弯方向;
4、步骤s2、基于给定的滚转角指令及转弯方向控制飞机进行横向滚转,滚转过程中,设定法向过载指令为1g,并按速度指令对飞行速度进行控制;
5、步骤s3、当横向滚转到位后,基于给定的法向过载指令进行法向过载控制,并按所述油门指令进行油门控制,直至飞机的现实航迹方位角满足给定的航迹方位角指令;
6、步骤s4、当现实航迹方位角满足给定的航迹方位角指令后,对飞机进行改平,改平过程中,按当前气压高度进行纵向控制,按航迹方位角指令进行横向控制,按速度指令进行自动油门控制,直至满足飞机平飞条件。
7、优选的是,步骤s2中,对飞行速度进行控制包括:
8、步骤s21、按给定的速度指令降低或增加百分比设定速度范围的速度下限及速度上限;
9、步骤s22、在横向滚转过程中,当速度低于速度下限时,以油门上限限制值作为控制策略,增大油门直至速度落入所述速度范围内,当速度高于速度上限时,通过滞环减少油门偏度直至速度落入所述速度范围内。
10、优选的是,步骤s3中,现实航迹方位角满足给定的航迹方位角指令包括:
11、获取所述航迹方位角指令给定的目标航迹方位角,确定所述目标航迹方位角与所述现实航迹方位角的差值,当所述差值小于设定值时,确定所述现实航迹方位角满足给定的航迹方位角指令。
12、优选的是,所述设定值为10°。
13、优选的是,步骤s3进一步包括:
14、向驾驶员展示保持飞机高度不变的滚转角与法向过载对应关系;
15、接收驾驶员参考所述对应关系所做出的对法向过载指令和/或滚转角指令的修改,并基于修改后的法向过载指令和/或滚转角指令进行高度修正,其中,当需要增加高度时,由驾驶员根据所述对应关系,减小滚转角或增大法向过载,当需要降低高度时,由驾驶员根据所述对应关系,增加滚转角或减小法向过载。
16、本申请第二方面提供了一种飞机大机动转弯自动控制装置,主要包括:
17、指令采集模块,用于采集顶层机动算法给出的控制指令,所述控制指令包括法向过载指令、滚转角指令、航迹方位角指令、速度指令、油门指令及转弯方向;
18、滚转控制模块,用于基于给定的滚转角指令及转弯方向控制飞机进行横向滚转,滚转过程中,设定法向过载指令为1g,并按速度指令对飞行速度进行控制;
19、方位控制模块,用于当横向滚转到位后,基于给定的法向过载指令进行法向过载控制,并按所述油门指令进行油门控制,直至飞机的现实航迹方位角满足给定的航迹方位角指令;
20、改平控制模块,用于当现实航迹方位角满足给定的航迹方位角指令后,对飞机进行改平,改平过程中,按当前气压高度进行纵向控制,按航迹方位角指令进行横向控制,按速度指令进行自动油门控制,直至满足飞机平飞条件。
21、优选的是,所述滚转控制模块包括:
22、速度范围确定单元,用于按给定的速度指令降低或增加百分比设定速度范围的速度下限及速度上限;
23、速度控制单元,用于在横向滚转过程中,当速度低于速度下限时,以油门上限限制值作为控制策略,增大油门直至速度落入所述速度范围内,当速度高于速度上限时,通过滞环减少油门偏度直至速度落入所述速度范围内。
24、优选的是,所述方位控制模块包括:
25、航迹方位角指令满足判定单元,用于获取所述航迹方位角指令给定的目标航迹方位角,确定所述目标航迹方位角与所述现实航迹方位角的差值,当所述差值小于设定值时,确定所述现实航迹方位角满足给定的航迹方位角指令。
26、优选的是,所述设定值为10°。
27、优选的是,所述方位控制模块进一步包括:
28、对应关系展示单元,用于向驾驶员展示保持飞机高度不变的滚转角与法向过载对应关系;
29、指令修改单元,用于接收驾驶员参考所述对应关系所做出的对法向过载指令和/或滚转角指令的修改,并基于修改后的法向过载指令和/或滚转角指令进行高度修正,其中,当需要增加高度时,由驾驶员根据所述对应关系,减小滚转角或增大法向过载,当需要降低高度时,由驾驶员根据所述对应关系,增加滚转角或减小法向过载。
30、本申请能够自动控制飞机大机动转弯,不需要人为干预,飞行员可以专注对抗任务。如果需要改变转弯速度和高度,可以对法向过载指令和滚转角指令的大小进行实时调整,具有较好的灵活性。
技术特征:
1.一种飞机大机动转弯自动控制方法,其特征在于,包括:
2.如权利要求1所述的飞机大机动转弯自动控制方法,其特征在于,步骤s2中,对飞行速度进行控制包括:
3.如权利要求1所述的飞机大机动转弯自动控制方法,其特征在于,步骤s3中,现实航迹方位角满足给定的航迹方位角指令包括:
4.如权利要求3所述的飞机大机动转弯自动控制方法,其特征在于,所述设定值为10°。
5.如权利要求1所述的飞机大机动转弯自动控制方法,其特征在于,步骤s3进一步包括:
6.一种飞机大机动转弯自动控制装置,其特征在于,包括:
7.如权利要求6所述的飞机大机动转弯自动控制装置,其特征在于,所述滚转控制模块包括:
8.如权利要求6所述的飞机大机动转弯自动控制装置,其特征在于,所述方位控制模块包括:
9.如权利要求8所述的飞机大机动转弯自动控制装置,其特征在于,所述设定值为10°。
10.如权利要求6所述的飞机大机动转弯自动控制装置,其特征在于,所述方位控制模块进一步包括:
技术总结
本申请属于飞行控制技术领域,特别涉及一种飞机大机动转弯自动控制方法及装置。该方法包括步骤S1、采集顶层机动算法给出的控制指令;步骤S2、基于给定的滚转角指令及转弯方向控制飞机进行横向滚转,滚转过程中,设定法向过载指令为1g,并按速度指令对飞行速度进行控制;步骤S3、当横向滚转到位后,基于给定的法向过载指令进行法向过载控制,并按所述油门指令进行油门控制;步骤S4、当现实航迹方位角满足给定的航迹方位角指令后,对飞机进行改平,改平过程中,按当前气压高度进行纵向控制,按航迹方位角指令进行横向控制,按速度指令进行自动油门控制,直至满足飞机平飞条件。本申请能够自动控制飞机大机动转弯,不需要人为干预。
技术研发人员:王志刚,朱家兴,丁岩,王业光,赵滨
受保护的技术使用者:中国航空工业集团公司沈阳飞机设计研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!