用于机器人调度的方法、机器人和服务器与流程
本申请涉及机器人,更具体地涉及用于机器人调度的方法、机器人和服务器。
背景技术:
1、近年来,通过机器人进行货品配送已经能够在生产和生活中扮演着越来越重要的角色。在传统的机器人配送中,主要关注于在单栋建筑在同楼层或者跨楼层的调度方案。随着相关技术的发展,在酒店群楼、多栋建筑楼宇的园区等配送服务场景中通常需要机器人在多个楼栋间进行跨楼栋配送。
技术实现思路
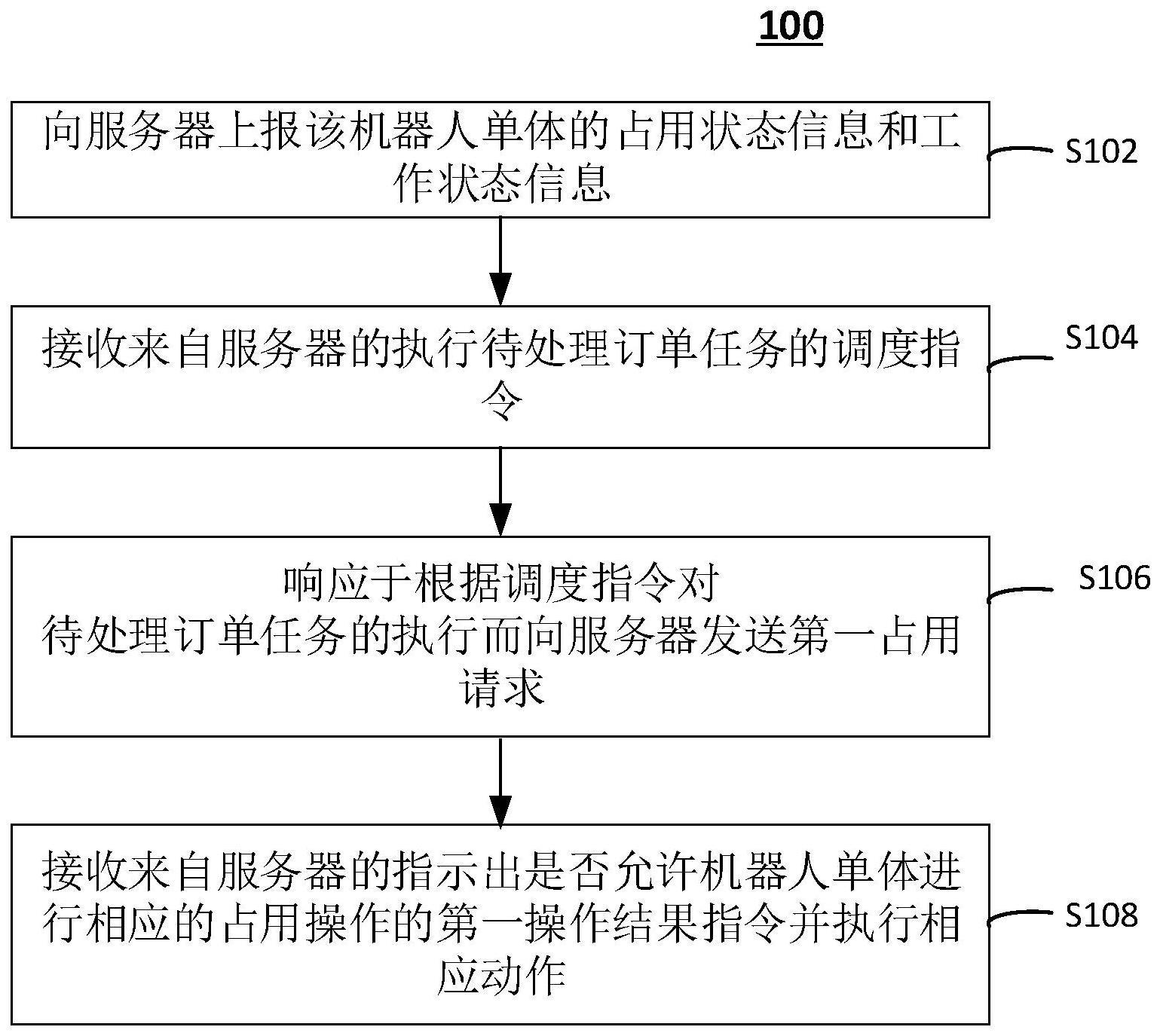
1、在第一方面中,本请求的实施例提供了一种用于机器人调度的方法,应用于机器人,包括:向服务器上报机器人的占用状态信息和工作状态信息,其中占用状态信息包括机器人的有关楼栋间通道或电梯占用以及避让点占用的信息,并且工作状态信息包括机器人的位置信息和有关是否正在执行订单任务的信息;接收来自服务器的执行待处理订单任务的调度指令,其中调度指令包括有关指示机器人导航到待处理订单任务的相关地址的指令;响应于根据调度指令对待处理订单任务的执行而向服务器发送第一占用请求,第一占用请求包括有关机器人要占用的楼栋间通道或电梯的位姿信息;以及接收来自服务器的指示出是否允许机器人进行相应的占用操作的第一操作结果指令并执行相应动作。
2、在第二方面中,本请求的实施例提供了一种用于机器人调度的方法,应用于服务器,包括:接收多个机器人上报的占用状态信息和工作状态信息,占用状态信息包括多个机器人中各机器人的有关楼栋间通道或电梯占用以及避让点占用的信息,并且工作状态信息包括多个机器人中各机器人的位置信息和有关是否正在执行订单任务的信息;基于多个机器人上报的工作状态信息以及待处理订单任务的相关地址,确定多个机器人中未正在执行订单任务并且离待处理订单任务的相关地址距离最近的目标机器人,并向目标机器人发送执行待处理订单任务的调度指令;接收目标机器人响应于根据调度指令对待处理订单任务的执行而发送的第一占用请求,第一占用请求包括有关目标机器人要占用的楼栋间通道或电梯的位姿信息;以及基于多个机器人上报的占用状态信息来判断是否允许目标机器人进行相应的占用操作,并向目标机器人发送指示出是否允许目标机器人进行相应的占用操作的第一操作结果指令以供目标机器人执行相应动作。
3、在第三方面中,本请求的实施例提供了一种机器人,包括:处理器,存储器,存储有计算机可读指令;处理器被配置为执行计算机可读指令以执行根据第一方面的用于机器人调度的方法。
4、在第四方面中,本请求的实施例提供了一种服务器,包括:处理器,存储器,存储有计算机可读指令;处理器被配置为执行计算机可读指令以执行根据第二方面的用于机器人调度的方法。
5、在第五方面中,本请求的实施例提供了一种计算机可读存储介质,存储有指令,指令在由处理器执行时使得处理器实现根据第一方面或第二方面的用于机器人调度的方法。
6、根据本申请的用于机器人调度的方法综合考虑并解决了机器人在楼群间配送的实际场景中涉及的各种机器人调度问题,包括多楼栋多机器人配送任务管理及机器人乘梯管理等。根据本申请的机器人和服务器在其间之间采用非常轻量级的数据交互,减少了调度指令传输中延迟和丢包的风险,进而使调度方案实效性更好、稳定性更强。
技术特征:
1.一种用于机器人调度的方法,应用于机器人,包括:
2.根据权利要求1所述的方法,还包括:
3.根据权利要求2所述的方法,还包括:
4.根据权利要求3所述的方法,还包括:在所述第一操作结果指令指示出允许所述机器人进行相应的占用操作的情况下,执行相应的占用操作。
5.根据权利要求4所述的方法,还包括:在占用操作完成后,清除楼栋间通道或电梯占用标志。
6.根据权利要求3所述的方法,还包括:
7.根据权利要求2或4所述的方法,还包括:
8.根据权利要求1所述的方法,其中,所述上报按照以下方式之一进行:
9.根据权利要求1所述的方法,其中,所述待处理订单任务的相关地址包括所述待处理订单任务的取货地址或送货地址中的至少一者。
10.一种机器人调度的方法,应用于服务器,包括:
11.根据权利要求10所述的方法,还包括
12.根据权利要求10所述的方法,其中,所述多个机器人的上报按照以下方式之一进行:
13.根据权利要求10所述的方法,其中,所述待处理订单任务的相关地址包括所述待处理订单任务的取货地址或送货地址。
14.一种机器人,包括:
15.一种服务器,包括:
16.一种计算机可读存储介质,存储有指令,所述指令在由处理器执行时使得所述处理器实现根据权利要求1至9或10至13中任一项所述的用于机器人调度的方法。
技术总结
提供了用于机器人调度的方法、机器人和服务器。一种用于机器人调度的方法,应用于机器人,包括:向服务器上报机器人的占用状态信息和工作状态信息,其中占用状态信息包括机器人的有关楼栋间通道或电梯占用以及避让点占用的信息,并且工作状态信息包括机器人的位置信息和有关是否正在执行订单任务的信息;接收来自服务器的执行待处理订单任务的调度指令;响应于根据调度指令对待处理订单任务的执行而向服务器发送第一占用请求,该第一占用请求包括有关机器人要占用的楼栋间通道或电梯的位姿信息;以及接收来自服务器的指示出是否允许机器人进行相应的占用操作的第一操作结果指令并执行相应动作。
技术研发人员:廖益木,陈志樑
受保护的技术使用者:广州昂宝电子有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!