一种基于偏差校正的多智能体协同跟踪控制系统及方法
本发明涉及工程控制领域,特别是涉及一种基于偏差校正的多智能体协同跟踪控制系统及方法。
背景技术:
1、自然界有很多有趣的生物现象,比如大雁的排队列飞行、蚁群的聚集和鱼群的移动等,虽然这些行为看似简单,但是它们具有一种整体的特性,能够通过个体的相互合作完成一些复杂任务。受此启发,越来越多的研究人员对此进行了深入地研究。在这种背景下,多智能体系统应运而生。
2、近年来,多智能体系统在各个领域的应用成倍增加,从制造业和电气工程到军事应用和现代医疗行业。同时,随着网络技术的飞速发展和各类系统规模的不断扩大,智能体之间需要通过网络彼此通信来协同完成既定目标,即网络化多智能体系统协同控制,由于其独特的优势,网络化多智能体系统的协同控制被应用到各个领域,如无人机编队、智能电网和多传感器网络等。
3、然而,由于通信网络的引入,网络化多智能体系统中不可避免地存在随机网络诱导时延、数据包乱序与丢失等通信约束问题,包括多智能体之间的通信约束以及每个智能体内部反馈通道和前馈通道的通信约束,这些通信约束不仅会影响系统的控制性能,更严重的甚至会破坏系统的稳定性。
4、目前,解决网络化多智能体系统协同输出跟踪控制问题的方法主要存在以下不足:1)实际应用中大多数智能体系统的状态是不可直接测量的,而现有方法中一般假设状态直接可测;2)实际通信中产生的网络诱导时延、数据包乱序与丢失均具有较强的随机性,且大多时候远远小于其上界值,而现有方法将其统一处理为固定时延具有较强的保守性;3)对于多智能体之间的通信约束以及每个智能体内部反馈通道和前馈通道的通信约束,采用现有办法不能完全解决。
5、由于上述局限,大大限制了现有网络化多智能体主从式协同输出跟踪控制方法在实际工程中的应用和推广,因此,网络化多智能体系统的控制性能和系统的稳定性仍有待提升。
技术实现思路
1、基于此,本发明实施例提供一种基于偏差校正的多智能体协同跟踪控制系统及方法,以提高多智能体系统的控制性能,从而提升系统的稳定性。
2、为实现上述目的,本发明实施例提供了如下方案:
3、一种基于偏差校正的多智能体协同跟踪控制系统,包括:多个控制模块,一个控制模块连接一个智能体;
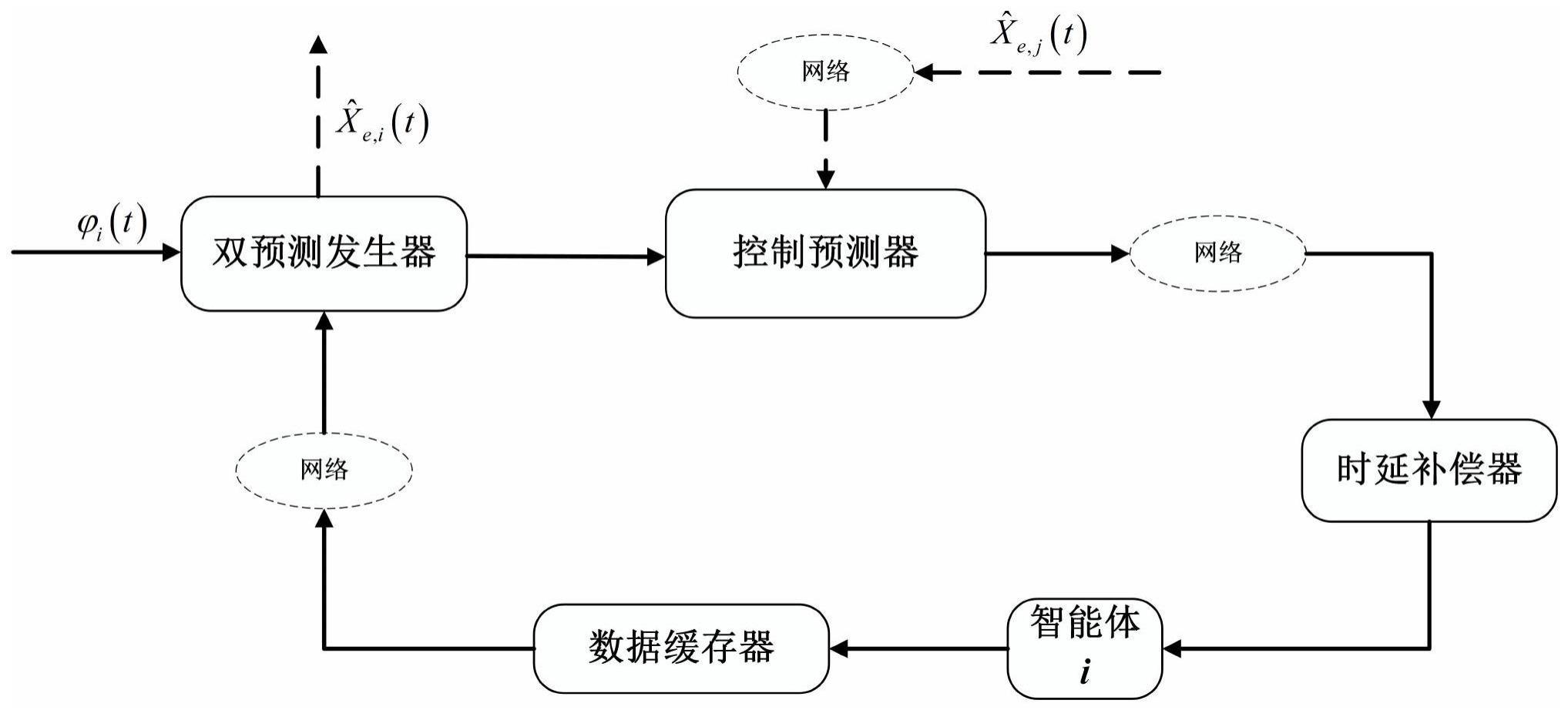
4、对于第i个智能体,第i个控制模块,包括:依次连接的数据缓存器、双预测发生器、控制预测器和时延补偿器;所述数据缓存器和所述时延补偿器均与第i个智能体连接;
5、第i个控制模块中的所述数据缓存器,用于:
6、获取并缓存第i个智能体的输出数据包;所述输出数据包,包括传感器输出的数据序列和对应的时间戳;
7、将第i个智能体的输出数据包发送至第i个控制模块中的所述双预测发生器中;
8、第i个控制模块中的所述双预测发生器,用于:
9、根据第i个智能体的输出数据包、系统参考输入信号、历史控制量和随机网络时延,采用预测控制方法计算预测量;所述随机网络时延,包括:智能体的反馈通道的随机网络时延、智能体的前馈通道的随机网络时延和智能体之间的随机网络时延;
10、将预测量分为自身控制预测量和输出预测量,将所述自身控制预测量发送至第i个控制模块中的控制预测器,将所述输出预测量发送至其他控制模块中的控制预测器;所述其他控制模块,包括:与多智能体系统中除第i个智能体之外的智能体连接的控制模块;
11、第i个控制模块中的所述控制预测器,用于:
12、获取其他控制模块发送的输出预测量;
13、根据第i个控制模块中的所述双预测发生器发送的自身控制预测量和其他控制模块发送的输出预测量,计算第i个智能体的控制包,并将所述控制包发送至第i个控制模块中的所述时延补偿器中;所述控制包,包括:控制序列和对应的时间戳;
14、第i个控制模块中的所述时延补偿器,用于:
15、根据智能体的前馈通道的随机网络时延和所述控制包中的时间戳,从控制序列中选取合适的控制量施加到第i个智能体上。
16、本发明还提供了一种基于偏差校正的多智能体协同跟踪控制方法,包括:
17、获取并缓存第i个智能体的输出数据包;所述输出数据包,包括传感器输出的数据序列和对应的时间戳;
18、根据第i个智能体的输出数据包、系统参考输入信号、历史控制量和随机网络时延,采用预测控制方法计算预测量,并将预测量分为自身控制预测量和输出预测量;所述随机网络时延,包括:智能体的反馈通道的随机网络时延、智能体的前馈通道的随机网络时延和智能体之间的随机网络时延;
19、获取其他智能体的输出预测量;所述其智能体为多智能体系统中除第i个智能体之外的智能体;
20、根据第i个智能体的自身控制预测量和其他智能体的输出预测量,计算第i个智能体的控制包;所述控制包,包括:控制序列和对应的时间戳;
21、根据智能体的前馈通道的随机网络时延和所述控制包中的时间戳,从控制序列中选取相应的控制量施加到第i个智能体上。
22、根据本发明提供的具体实施例,本发明公开了以下技术效果:
23、本发明实施例提出了一种基于偏差校正的多智能体协同跟踪控制系统及方法,将通信网络产生的随机网络诱导时延、数据包乱序与丢失统一处理为随机网络时延,为了主动补偿智能体之间和每个智能体反馈通道和前馈通道存在的随机网络时延,设计多智能体协同跟踪控制系统,包括:数据缓存器、双预测发生器、控制预测器和时延补偿器,本发明实施例同时考虑了智能体之间的通信约束以及每个智能体内部反馈通道和前馈通道的通信约束,这些通信约束问题都会被主动补偿,能提高多智能体系统的控制性能,从而提升系统的稳定性。
技术特征:
1.一种基于偏差校正的多智能体协同跟踪控制系统,其特征在于,包括:多个控制模块,一个控制模块连接一个智能体;
2.根据权利要求1所述的一种基于偏差校正的多智能体协同跟踪控制系统,其特征在于,第i个控制模块中的所述双预测发生器,具体包括:
3.根据权利要求2所述的一种基于偏差校正的多智能体协同跟踪控制系统,其特征在于,所述状态观测器,在根据所述比较结果、第i个智能体的传感器输出的数据序列、系统参考输入信号、历史控制量和随机网络时延,得到状态估计量,基于所述状态估计量采用预测控制方法计算预测量的方面,具体用于:
4.根据权利要求1所述的一种基于偏差校正的多智能体协同跟踪控制系统,其特征在于,第i个控制模块中的所述双预测发生器中自身控制预测量为:
5.根据权利要求1所述的一种基于偏差校正的多智能体协同跟踪控制系统,其特征在于,第i个控制模块中的所述控制预测器,在根据第i个控制模块中的所述双预测发生器发送的自身控制预测量和其他控制模块发送的输出预测量,计算第i个智能体的控制包方面,具体用于:
6.根据权利要求5所述的一种基于偏差校正的多智能体协同跟踪控制系统,其特征在于,所述控制增量的计算公式为:
7.一种基于偏差校正的多智能体协同跟踪控制方法,其特征在于,包括:
8.根据权利要求7所述的一种基于偏差校正的多智能体协同跟踪控制方法,其特征在于,根据第i个智能体的输出数据包、系统参考输入信号、历史控制量和随机网络时延,首先得到状态估计量,然后采用预测控制方法计算预测量,具体包括:
9.根据权利要求8所述的一种基于偏差校正的多智能体协同跟踪控制方法,其特征在于,根据所述比较结果、第i个智能体的传感器输出的数据序列、系统参考输入信号、历史控制量和随机网络时延,首先得到状态估计量,然后采用预测控制方法计算预测量,具体包括:
技术总结
本发明公开了一种基于偏差校正的多智能体协同跟踪控制系统及方法,涉及工程控制领域,该多智能体协同跟踪控制系统,包括:数据缓存器、双预测发生器、控制预测器和时延补偿器;数据缓存器获取并缓存智能体的输出数据包;双预测发生器根据输出数据包、系统参考输入信号、历史控制量和随机网络时延,采用预测控制方法计算预测量,并将预测量分为自身控制预测量和输出预测量;控制预测器根据自身控制预测量和接收到的其他的双预测发生器的输出预测量计算控制量,从而得到控制包;时延补偿器根据智能体的前馈通道的随机网络时延和控制包中的时间戳,从控制序列中选取相应的控制量施加到智能体上。本发明能提高多智能体系统的控制性能和稳定性。
技术研发人员:庞中华,杜涛
受保护的技术使用者:北方工业大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!